一种力矩传感器以及力矩和踏频采集方法与流程
- 国知局
- 2024-08-01 08:17:53
本发明属于电助力车,具体涉及一种力矩传感器以及力矩和踏频采集方法。
背景技术:
1、在节能减排的大环境下,电助力自行车因其节能、绿色、轻便的优势,在国内逐渐普及。并且随着电动车新国标的推出,无脚蹬的电动车被认定为“电摩”,而电助力自行车在外观上与自行车几乎没有太大区别,使用上依靠人力与电机助力相结合的方式,更具有政策优势。目前市场上低端的电助力车大部分采用踏频传感器作为助力感知器件,而高端电助力车大部分采用力矩传感器作为感知器件。
2、常用的力矩传感器有后轴勾爪形式、扭簧形式、链轮形式、中轴形式、内置形式。其中中轴形式和内置形式的传感器在精度、响应速度、耐磨性、抗冲击性都有很大优势。
3、目前市场上的中轴或内置力矩传感器采用模拟信号输出的方式输出力矩大小,并且大都存在着零点标定的问题。模拟信号在传输的过程中容易受到外界电磁干扰导致采样不准确,并且使用者需要滤波、采样、转换、去噪等一系列操作,对使用人员不友好。零点标定问题即随着外界电磁、温度、湿度环境的变化以及使用中机械结构微形变,导致传感器的零点与出厂标定的零点不符,或随环境变化漂移。这些问题会导致传感器使用寿命短,电助力车助力不稳,使用体验差。另外现有技术大多采用应变片方式采集扭矩,原始信号精度不够高,受温度等环境影响比较大,而且采用模拟信号进行输出,信号易受到干扰,使用流程繁琐。
技术实现思路
1、本发明的目的之一在于提供一种力矩传感器,提高力矩检测精度,降低环境影响。
2、为实现上述目的,本发明所采取的技术方案为:
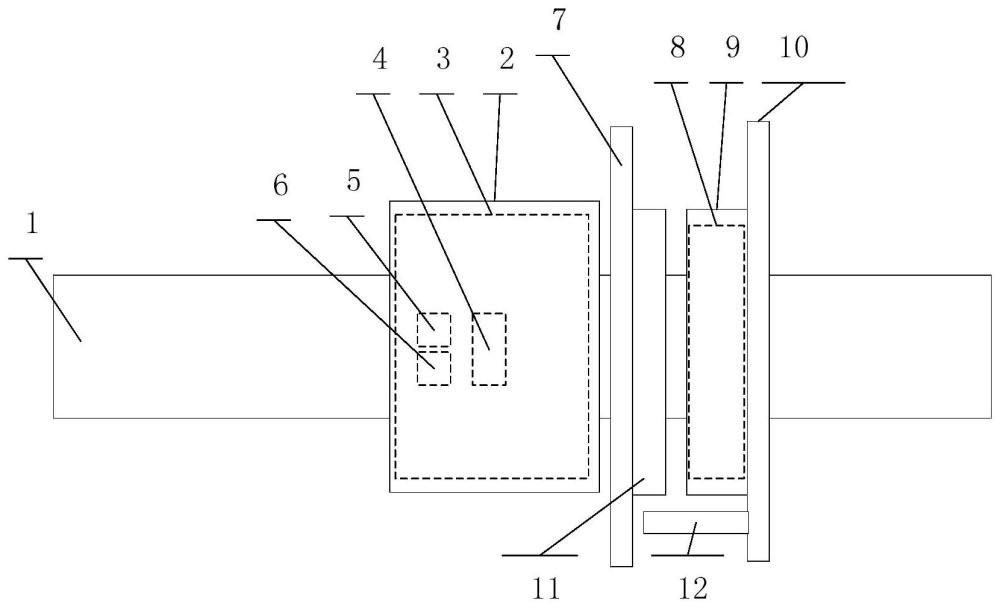
3、一种力矩传感器,应用于电助力车,所述力矩传感器包括中轴、弹性连接体、tmr传感器模块、强磁磁铁对、随动pcb板、随动无线线圈、固定无线线圈、固定pcb板、磁环以及测速hall模块,其中:
4、所述随动pcb板、随动无线线圈以及磁环固定在所述中轴上,所述固定无线线圈、固定pcb板以及测速hall模块固定在电助力车的中置电机内部机壳上,所述弹性连接体的两端分别通过齿轮与中轴和电助力车的牙盘连接,所述强磁磁铁对和tmr传感器模块分别与所述弹性连接体的两端固定,所述随动无线线圈和tmr传感器模块电连接至所述随动pcb板,所述固定无线线圈和测速hall模块电连接至所述固定pcb板;
5、所述固定无线线圈与所述随动无线线圈为嵌套设置,所述测速hall模块靠近所述磁环的外圈设置,在无力矩施加情况下,所述强磁磁铁对与tmr传感器模块靠近且位置对应。
6、以下还提供了若干可选方式,但并不作为对上述总体方案的额外限定,仅仅是进一步的增补或优选,在没有技术或逻辑矛盾的前提下,各可选方式可单独针对上述总体方案进行组合,还可以是多个可选方式之间进行组合。
7、作为优选,所述强磁磁铁对中的两个强磁磁铁在探测轴方向上为两个极性相反的强磁磁铁,并且两个强磁磁铁在探测轴方向上反向平行磁化。
8、作为优选,所述弹性连接体、tmr传感器模块、强磁磁铁对三者整体的外部套设有隔磁罩。
9、作为优选,所述随动pcb板上设有整流电路、ask信号调制电路和随动控制器,所述随动无线线圈与所述整流电路连接,所述整流电路与所述随动控制器和ask信号调制电路连接,所述随动控制器与所述ask信号调制电路连接,所述tmr传感器模块连接至所述随动控制器的adc模块;
10、所述固定pcb板上设有全桥逆变电路、ask信号解调电路和固定控制器,所述固定无线线圈分别与所述全桥逆变电路和ask信号解调电路连接,所述固定控制器分别与所述全桥逆变电路、ask信号解调电路和测速hall模块连接,且所述测速hall模块连接至所述固定控制器的定时器模块。
11、本发明提供的一种力矩传感器,基于tmr传感器模块实现力矩检测,在温度外部电磁干扰方面具有优势,并且引入测速hall模块,可实现力矩和踏频的同步检测。
12、本发明的目的之二在于提供一种力矩和踏频采集方法,实现力矩和踏频的高精度采集以及数字型输出。
13、为实现上述目的,本发明所采取的技术方案为:
14、一种力矩和踏频采集方法,应用于电助力车,基于所述的力矩传感器实现,所述力矩和踏频采集方法,包括:
15、执行初始零点标定得到零点标定值;
16、定时采集tmr传感器模块的测量值,根据所述测量值和零点标定值计算力矩值,并在定时采集及计算力矩值的过程中实时执行过程零点标定来更新零点标定值;
17、测速hall模块与固定pcb板上的定时器模块连接,根据定时器模块触发高低电平中断的时间和次数计算踏频值。
18、作为优选,所述初始零点标定,执行过程如下:
19、(1)初始化初始计时时间为0;
20、(2)采集电压值,判断电压值是否超出限幅值;
21、(3)若超出限幅值,则重置初始计时时间为0,并返回步骤(2);若未超出限幅值,则计算当前初始计时时间内采集的所有电压值的均值,判断均值是否超出零点阈值;
22、(4)若超出零点阈值,则重置初始计时时间为0,并返回步骤(2);若未超出零点阈值,则判断初始计时时间是否达到初始时间阈值;
23、(5)若未达到初始时间阈值,则返回步骤(2);若达到初始时间阈值,则输出均值作为零点标定值。
24、作为优选,所述过程零点标定,执行过程如下:
25、(1)初始化过程计时时间为0;
26、(2)采集电压值,判断电压值是否超出限幅值;
27、(3)若超出限幅值,则重置过程计时时间为0,并返回步骤(2);若未超出限幅值,则计算当前过程计时时间内采集的所有电压值的均值,判断均值是否超出零点阈值;
28、(4)若超出零点阈值,则重置过程计时时间为0,并返回步骤(2);若未超出零点阈值,则判断过程计时时间是否达到过程时间阈值;
29、(5)若未达到过程时间阈值,则返回步骤(2);若达到过程时间阈值,则输出均值作为零点标定值,所述过程时间阈值大于初始时间阈值。
30、作为优选,所述根据所述测量值和零点标定值计算力矩值,包括:
31、t=(v1-v0)/k
32、式中,t为力矩值,v1为测量值,v0为零点标定值,k为线性系数。
33、作为优选,所述根据定时器模块触发高低电平中断的时间和次数计算踏频值,包括:
34、
35、式中,f为踏频值,m为采样总次数,n为第n次采样,tmin为一分钟转换为us单位后的时间常数,cn为第n次采样下的定时器计数次数,tn_c为第n次采样下定时器经过分频后一个计数的时间,c0为磁环一圈中n极或s极的个数。
36、作为优选,所述测速hall模块由两个双极性锁存hall传感器组成,对定时器模块触发高低电平中断时两个双极性锁存hall传感器输入的高低电平进行正交编码检测,对比本次正交编码的值与上一次的正交编码的值确定中轴为正转或反转。
37、本发明提供的一种力矩和踏频采集方法,与现有技术相比,具有以下有益效果:
38、(1)本发明基于tmr传感器模块、无线数能同传技术提供了一整套电踏车用的力矩和踏频采集方法。力矩及踏频信息采用数字方式传输而非模拟量,使用者可以直接根据通讯协议接收力矩信息、踏频信息、正反转信息。
39、(2)本发明通过初始零点标定及过程零点标定算法,可以有效的防止因环境的影响而导致的零点漂移问题。同时,由于力矩信息通过tmr传感器模块获取,tmr芯片相对于线性hall传感器,在温度外部电磁干扰方面也有一定的优势,tmr传感器模块的抗干扰性能更强。
40、(3)本发明通过正交编码的方式实现正反转的检测,通过高级定时器中断检测高低电平的时间差来计算踏频,并进行均值滤波,实现踏频的平稳输出。该方法相对于其他力矩传感器只输出高低电平来说,简化了使用者再去自己计算的步骤,并且微秒级分辨率的踏频计算更加精准。
本文地址:https://www.jishuxx.com/zhuanli/20240722/231061.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。