一种全向型躯干可重构多足平台
- 国知局
- 2024-08-01 08:19:17
本发明涉及一种全向型躯干可重构多足平台,具体讲的是一种躯干具有三种变形模式,整机具有俯仰、收腰和全向三种步态的高机动性、高地形适应性闭链腿式步行平台。
背景技术:
1、将闭式运动链应用于步行运载平台的腿机构,每个腿机构由一个独立的电机驱动。较开链腿而言,在相同的材质、外载和速度级别的条件下,闭链杆系理论上只承受拉、压载荷,多为典型的二力杆件,使得闭链腿机构总体具有良好的刚度和稳定性。
2、中国专利cn110171500a公开了“一种变躯干多足步行平台”,该装置由相同的前后腿机构和左右躯干组成。相邻部件之间实现转动连接形成封闭单环路。变躯干多足步行平台两个相同的前、后腿机构均为闭链连杆机构,由单电机驱动行走。具体的讲是一种躯干具有两种变形模式的高机动性闭链腿式步行平台;由镜像布置的前方、后方两组四足腿机构以及两组活动躯干构件构成空间六杆机构;前方、后方腿机构各由一个电机驱动;构成躯干的六杆机构为具有一个奇异位置的单自由度机构,躯干的变形根据电机控制的不同有两种模式,在不同变形模式下获得不同的躯干姿态,可用于探测探测、物资运输的一种步行平台。
技术实现思路
1、本发明要解决的问题是提供一种步行平台,相较于已有的步行平台,可通过躯干的变形以及步态的变化提高步行平台的地形适应性。躯干的变形有三种模式,在俯仰步态变形模式下面对墙壁、台阶等障碍时具有高通过性,在收腰步态变形模式下面对壕沟地形、狭窄地形具有高适应性,在全向步态变形模式下面对空间受限的环境可以高效运行并及时做出路径调整,具有高地形适应性。
2、本发明的技术方案:
3、一种全向型躯干可重构多足平台由相同的左前、右前、左后、右后腿机构和躯干组成;所述的左前、右前腿机构和左后、右后腿机构按照左前腿机构,左后腿机构,右后腿机构,右前腿机构的顺序逆时针布置。左前腿机构与躯干左前底座固定连接;右前腿机构与躯干右前底座固定连接;左后腿机构与躯干左后底座固定连接;右后腿机构与躯干右后底座固定连接;躯干前一短杆、躯干前二短杆与躯干左前底座、躯干右前底座转动连接;躯干后一短杆、躯干后二短杆与躯干左后底座、躯干右后底座转动连接;躯干左一全长杆、躯干左二全长杆与躯干左前底座、躯干左后底座转动连接;躯干右一全长杆、躯干右二全长杆与躯干右前底座、躯干右后底座转动连接;躯干前加固杆与躯干前一短杆、躯干右前底座固定连接;躯干右加固杆与躯干右一全长杆、躯干右后底座固定连接;躯干后加固杆与躯干后一短杆、躯干左后底座固定连接;躯干左加固杆与躯干左一全长杆、躯干左前底座固定连接;
4、所述的左前腿机构、右前腿机构、左后腿机构、右后腿机构的杆件形状、机械结构以及装配方式完全相同;左前腿机构、右前腿机构与左后腿机构、右后腿机构关于全向型躯干可重构多足平台横向对称面镜像布置;左前腿机构、左后腿机构与右前腿机构,右后腿机构关于全向型躯干可重构多足平台纵向对称面镜像布置;
5、所述的躯干中躯干左前底座与躯干右后底座的杆件形状、机械结构以及装配方式完全相同且关于全向型躯干可重构多足平台中心位置中心对称布置;躯干右前底座与躯干左后底座的杆件形状、机械结构以及装配方式完全相同且关于全向型躯干可重构多足平台中心位置中心对称布置;躯干前一短杆、躯干前二短杆与躯干后一短杆、躯干后二短杆的机械结构和装配方式完全相同,杆件形状关于全向型躯干可重构多足平台纵向对称面呈镜像对称,位置关于全向型躯干可重构多足平台横向对称面同向对称布置;躯干右一全长杆、躯干右二全长杆与躯干左一全长杆、躯干左二全长杆的机械结构以及装配方式完全相同,杆件形状关于全向型躯干可重构多足平台横向对称面呈镜像对称,位置关于全向型躯干可重构多足平台纵向对称面同向对称布置;
6、通过上述连接,完成全向型躯干可重构多足平台组装;所述的躯干中两个躯干左全长杆、两个躯干右全长杆转动连接关节的轴线方向在全向型躯干可重构多足平台左右两侧的横向对称面上且与竖直方向成一夹角φ,满足条件φ=θ,θ和φ方向相反;
7、当躯干左一全长杆、躯干左二全长杆与躯干左前底座、躯干左后底座连接处四个转动关节在俯视投影上位于一矩形的四个顶点时,控制躯干左前底座与躯干左一全长杆转动关节和躯干左前底座与躯干左二全长杆转动关节角位移实现一种变形模式,具体来说是躯干左前底座与躯干左一全长杆转动关节和躯干左前底座与躯干左二全长杆转动关节角位移等大反向实现俯仰变形模式,等大同向实现收腰变形模式。当躯干左前底座与躯干左一全长杆、躯干左二全长杆连接处两个转动关节和躯干左前底座与躯干前一短杆、躯干前二短杆连接处两个转动关节在俯视投影上分别位于一矩形的四个顶点时,控制躯干左前底座与躯干左一全长杆、躯干左二全长杆、躯干前一短杆、躯干前二短杆连接处四个转动关节角位移等大同向实现全向步态变形模式。
8、所述的躯干由躯干左前底座,躯干前二短杆,躯干前一短杆,躯干前加固杆,躯干右前底座,躯干右二全长杆,躯干右一全长杆,躯干右加固杆,躯干右后底座,躯干后二短杆,躯干后一短杆,躯干后加固杆,躯干左后底座,躯干左一全长杆,躯干左二全长杆,躯干左加固杆组成。
9、躯干前一短杆由前一短杆第一连接板,前一短杆,前一短杆第二连接板组成。
10、躯干左一全长杆由左一全长杆第一连接板,左一长杆,左二长杆,左一全长杆第二连接板组成。
11、所述的一种全向型躯干可重构多足平台的左前、右前、左后、右后腿机构均由单电机驱动行走。
12、所述的左前腿机构由左前行走部、右前行走部、左前动力部和挡板组成。
13、所述的右前行走部包括:两个右前第一大腿杆,右前第一三副杆,两个右前第一直杆,右前第一小腿杆,右前第二小腿杆,两个右前第二直杆,右前套筒,右前第二三副杆,两个右前第二大腿杆,右前第二基座,右前第一基座。
14、所述左前行走部与右前行走部的杆件形状,机械结构以及装配方式完全相同;左前行走部与右前行走部关于全向型躯干可重构多足平台左侧纵向对称面镜像布置。
15、所述的左前动力部包括:左前输出轴,左前第一曲柄,左前第一电机座,左前腿电机,左前第二电机座,左前第二曲柄,左前电机底座。
16、本发明的有益效果:
17、本发明的一种全向型躯干可重构多足平台是一种具有三种变形模式且运动具有三种步态的高机动性闭链腿式步行平台;可变形躯干为具有一个奇异位置的单自由度机构。躯干处于奇异位置时可以选择俯仰步态变形模式、收腰步态变形模式和全向步态变形模式使步行平台获得俯仰、收腰和全向三种不同的步态,躯干在俯仰步态变形模式下具有面对墙壁、台阶等障碍时的高通过性,在收腰步态变形模式下具有对壕沟地形、狭窄地形的高适应性,在全向步态变形模式下具有在空间受限的环境中高效运行并及时做出路径调整的高机动性。三种变形模式根据地形切换使其对各种复杂地形具有高适应性、高通过性与高机动性。可用于探测侦查、运载等领域。
技术特征:1.一种全向型躯干可重构多足平台,其特征在于:
2.根据权利要求1所述的一种全向型躯干可重构多足平台,其特征在于:
3.根据权利要求1所述的一种全向型躯干可重构多足平台,其特征在于:
4.根据权利要求3所述的一种全向型躯干可重构多足平台,其特征在于:
5.根据权利要求3所述的一种全向型躯干可重构多足平台,其特征在于:
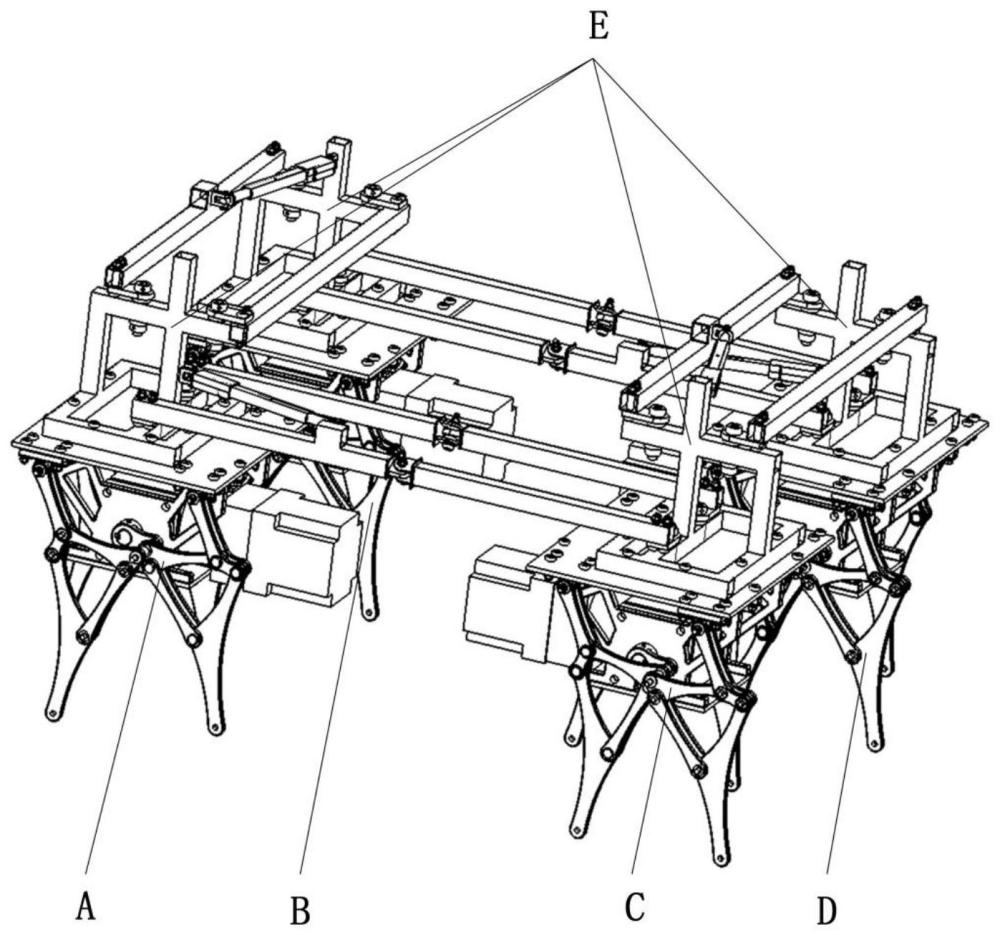
技术总结一种全向型躯干可重构多足平台,该装置包括:相同的左前、右前、左后、右后腿机构(A、B、C、D)和躯干(E);所述的左前、右前腿机构(A、B)和左后、右后腿机构(C、D)按照左前腿机构(A),左后腿机构(C),右后腿机构(D),右前腿机构(B)的顺序逆时针布置,每组腿机构各由一个电机驱动;设置躯干(E)中杆件的形状与几何参数,使躯干(E)为具有三种变形模式的二自由度空间机构,在三种变形模式下,全向型躯干可重构多足平台分别获得俯仰、收腰和全向三种不同的步态,具有高地形适应性与高机动性。技术研发人员:杨辉,武建昫,张桐,程闻轩,曾亮,周济晓,姚燕安受保护的技术使用者:北京交通大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/231166.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表