去连挂列车控制方法、车载控制器及去连挂列车与流程
- 国知局
- 2024-08-01 08:27:15
本发明涉及轨道交通领域,尤其是涉及一种去连挂列车控制方法、车载控制器及去连挂列车。
背景技术:
1、目前,城市轨道交通广泛应用的基于通信的列车自动控制系统,其安全防护距离的计算是基于ieee 1474.1标准所规定的安全制动模型。即列车施加紧急制动过程,需要考虑最不利情况,包含三个阶段:1)考虑t1时间的紧急制动请求到牵引力切除的过程,该阶段按照全力牵引加速度a1与最不利坡度加速度a2计算速度和位移增量;2)考虑t2时间的制动力施加过程,此阶段牵引力已切除,但是制动力还未施加,因此按照最不利坡度加速度a2的惰行工况计算该阶段的速度和位移增量;3)紧急制动施加阶段,此阶段列车处于制动状态,直至停车。因此,在进行不可突破的顶棚速度防护时,为避免触发紧急制动,实际所能达到的最高速度相对于顶棚速度会被压低约3~5千米每小时。
2、考虑到许多地铁线路存在潮汐客流特点,高峰时段、高峰方向客流量远高于平峰时段,运力需求存在非常强的时空分布不均衡特征。灵活编组的运营方式作为一种新兴的运输组织技术,是一种允许列车在运营线路的特定区域进行编组或解编作业,进而改变列车编组,可有效应对上述客流特征的方法,使得运输组织更加灵活,可节约运营成本。
3、对于具备灵活编组功能的列车自动控制系统,在进行连挂作业时,需要将车钩所能承受的碰撞速度,如5~8千米每小时作为不可突破的顶棚速度进行防护,并由区域控制器告知车载控制器该限速区域的起点。此时若列车自动驾驶系统按照上述的安全制动模型扣除相应的余量后,可能会导致计算的实际可用目标速度过低,可能导致去连挂作业过程中,去连挂列车撞击被连挂列车的车钩力度不够,影响连挂作业的成功率,带来脱钩、连挂失败等风险;除此之外,过低的列车去连挂运行速度也影响了连挂作业效率。
4、因此,如何在保证安全的前提下,提高连挂过程中的作业效率、提高连挂过程的成功率,成为需要解决的技术问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供了一种去连挂列车控制方法、车载控制器及去连挂列车,在保证安全的前提下,提高了去连挂作业效率和成功率。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明的第一方面,提供了一种去连挂列车控制方法,该方法包括:
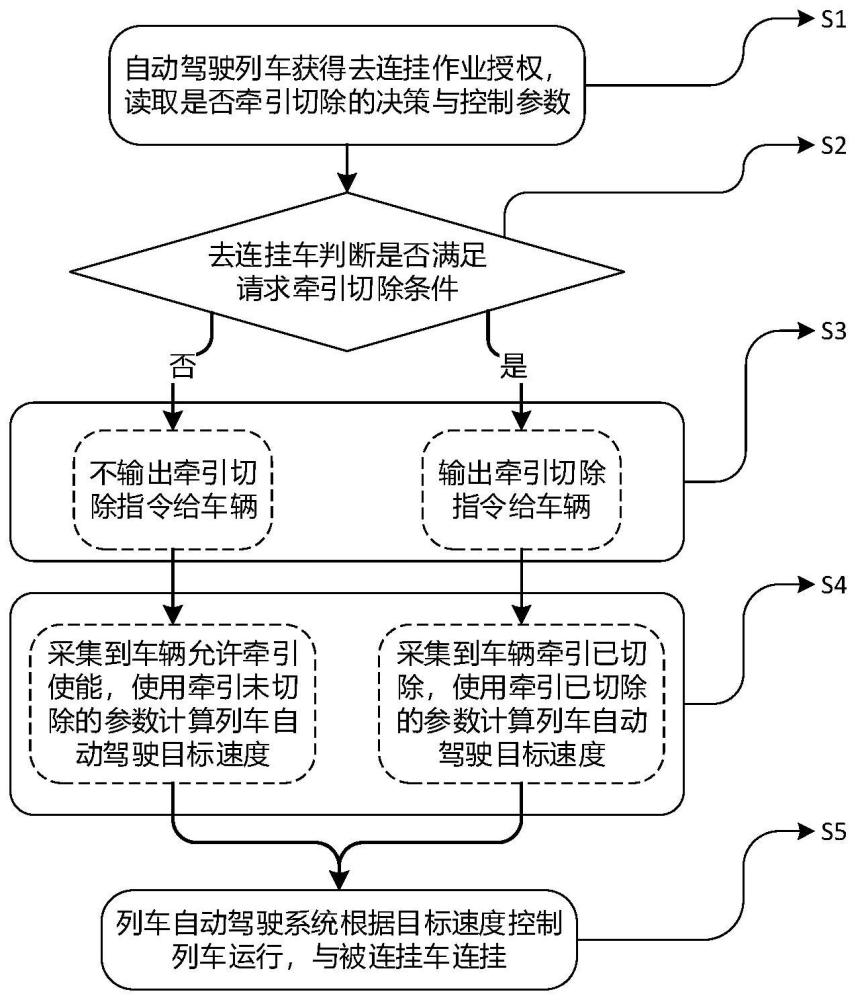
4、步骤s1、对于已获得去连挂作业授权的自动驾驶列车,读取用于判断是否采用牵引切除方式控制列车去连挂的决策控制参数;
5、步骤s2、在去连挂列车在向被连挂列车运行的过程中,基于列车当前状态和所述决策控制参数,判断是否满足请求牵引切除条件;
6、步骤s3、若满足请求牵引切除条件,信号系统向去连挂列车输出牵引切除指令,否则信号系统不输出牵引切除指令;
7、步骤s4、根据去连挂列车反馈的牵引已切除或授权允许牵引使能信息,采用与反馈信息对应的自动驾驶参数计算目标速度;
8、步骤s5、根据列车是否已切除牵引反馈与目标速度,控制列车运行,直至与被连挂列车连挂。
9、作为优选的技术方案,所述步骤s1中获得去连挂作业授权的判断标准为:对配置有灵活编组功能的信号系统,车载控制器接收到调度下发的去连挂命令,且接收到车辆系统反馈的允许去连挂授权,且接收到轨旁区域控制器下发的允许去连挂作业授权。
10、作为优选的技术方案,所述步骤s1中的决策控制参数包括用于决策是否在允许切牵引区域的速度和距离阈值,预估去连挂过程可用目标速度需要考虑的最不利坡度的扩大范围、期望的功能限速值,以及退出牵引切除请求的速度阈值。
11、作为优选的技术方案,所述步骤s2中的请求牵引切除条件为:
12、s2-a:列车速度与位置当前采样时刻在牵引切除区域内,且上一采样时刻不在;
13、s2-b:最不利坡度扩大范围内预估的可用目标速度小于期望的功能限速值;
14、当去连挂列车同时满足s2-a、s2-b条件时,则判定去连挂列车满足牵引切除条件。
15、作为优选的技术方案,所述s2-a中列车速度与位置是否在牵引切除区域内的判定依据为:当列车的速度大于配置的允许切牵引区域的速度阈值且列车距不可突破的连挂顶棚速度起点的距离小于配置的允许切牵引区域的距离阈值时,则认为列车在牵引切除区域内。
16、作为优选的技术方案,所述s2-b中最不利坡度扩大范围具体为:以区域控制器下发的不可突破的连挂顶棚速度起点为原点,向去连挂列车方向偏移配置的距离为区域起点,以被连挂列车最小安全车尾为终点的范围。
17、作为优选的技术方案,所述s2-b中预估的可用目标速度为区域控制器下发的不可突破连挂顶棚速度减去t1时间的全力牵引加速度a1与最不利坡度加速度a2造成的速度增量v1,再减去t2时间的最不利坡度加速度a2的惰行工况造成的速度增量v2,再减去考虑系统性能预先配置的余量v3。
18、作为优选的技术方案,所述步骤s3中信号系统输出牵引切除指令的同时,还施加有惰行约束点,用以满足列车自动驾驶系统从目标曲线规划、误差闭环控制命令角度,均不会输出牵引命令。
19、作为优选的技术方案,所述步骤s4中采用与反馈信息对应的自动驾驶参数计算目标速度,具体为:在采集到的去连挂列车反馈的牵引已切除时,将安全制动模型中用于计算紧急制动请求到牵引力切除过程速度增量v1的时间t1设置为0,将用于计算制动力施加过程中速度增量v2的时间t2设置为牵引未切除时的t1与t2时间之和。
20、作为优选的技术方案,所述步骤s5中车载控制器根据采集到的列车是否已切除牵引反馈与目标速度控制列车运行,具体为:当采集到车辆反馈牵引已切除时,车载控制器将限制输出的控制命令只能为制动或惰行,不能输出牵引指令。
21、作为优选的技术方案,所述步骤s3中,信号系统采用安全相关功能的输出接口向去连挂列车输出牵引切除指令;所述步骤s4中,采用安全相关功能的采集接口采集去连挂列车反馈的牵引已切除或授权允许牵引使能。
22、根据本发明的第二方面,提供了一种车载控制器,所述车载控制器采用任一项上述的方法进行列车去连挂作业控制。
23、根据本发明的第三方面,提供了一种去连挂列车,所述列车为灵活编组去连挂列车,其内搭载有上述的车载控制器,以及分别与所述车载控制器连接的列车测速定位设备、和列车与轨旁间通信设备。
24、根据本发明的第四方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现任一项所述的方法。
25、根据本发明的第五方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现任一项所述的方法。
26、与现有技术相比,本发明具有以下优点:
27、1)本发明通过与列车进行牵引切除请求与确认,可减少安全制动模型需要考虑的速度增量,提高去连挂过程列车自动驾驶实际可用的目标速度,可显著提高城市轨道交通灵活编组过程的去连挂作业效率与作业成功率。
28、2)本发明通过不可突破连挂顶棚速度减去t1时间的全力牵引加速度与最不利坡度加速度造成的速度增量,再减去t2时间的最不利坡度加速度的惰行工况造成的速度增量,再减去考虑系统性能预先配置的余量v3,可有效提高去连挂过程的可用目标速度。
29、3)本发明根据车辆反馈,在保证安全的前提下,自主选择合适的列车自动驾驶控制参数,以提高去连挂过程的作业效率、列车低速控制的平顺性,能够满足例如潮汐客流的时空非均衡分布运输需求下的节能减排,灵活编组等多元化运营要求,具备工程实施可行性。
30、4)本发明在牵引切除的过程,车载控制器将一直施加惰行约束点,可保证列车自动驾驶系统从目标曲线规划、误差闭环控制命令角度,均不会输出牵引命令,安全性更高。
本文地址:https://www.jishuxx.com/zhuanli/20240722/231793.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表