一种稳定放料的打印机抓取机构的制作方法
- 国知局
- 2024-08-01 03:35:46
本技术涉及打印机,具体为一种稳定放料的打印机抓取机构。
背景技术:
1、打印机抓取机构,是一种用于3d打印机的机构,主要是负责打印机的进料和对进入的原料起到一个夹持的作用,当机构使用时,会把原料输入打印机内,通过与进料管的配合使用,可以为打印机进行送料,不需要人工进行送料。
2、在一些特殊打印任务中,传统抓取机构不能根据打印机的打印速度实时调整进料速度,而且当对不同直径的原料夹持时,需要手动调整夹持机构之间的间距,无疑增加了工作内容,尤其是打印任务结束时,原料会落入原料箱,当需要再次使用时,需要再次以人工的形式把原料送入夹持机构,因此,针对上述问题提出一种稳定放料的打印机抓取机构。
技术实现思路
1、本实用新型的目的在于提供一种稳定放料的打印机抓取机构,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
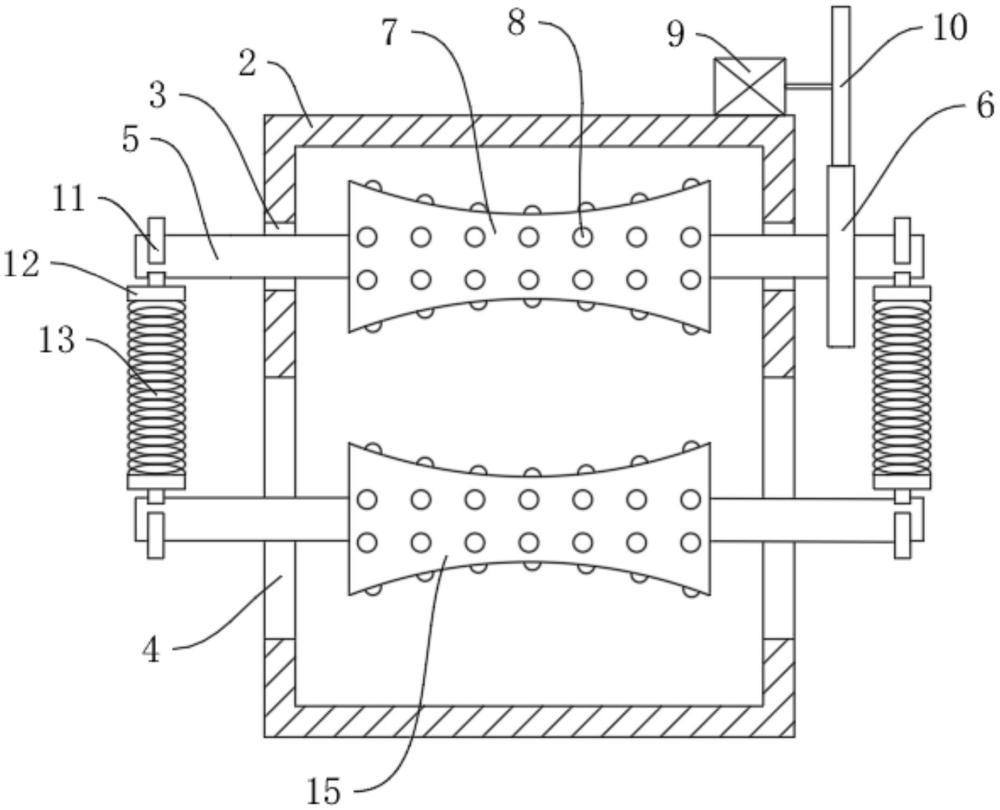
3、一种稳定放料的打印机抓取机构,包括进料管,所述进料管一端设置有壳体,所述壳体外侧设有圆孔和长条孔,所述圆孔内部转动连接有轴,所述轴一端固定连接有从动齿轮,所述轴中间位置固定连接有上压轮,所述上压轮外侧固定连接有凸起,所述轴两端设有凹槽,所述凹槽内卡合有钩子,所述钩子底端设有连接板,所述连接板一端固定连接有弹簧,所述壳体顶端固定连接有步进电机,所述步进电机一端固定连接有主动齿轮,所述长条孔内滑动连接的轴的中间位置转动连接有下压轮。
4、优选的,所述连接板数量为四个,两个为一组,共计两组,对称布置于弹簧的两侧。
5、优选的,所述凹槽的宽度略大于钩子的宽度,钩子可以卡合在凹槽内。
6、优选的,所述上压轮与下压轮均为两端大,中间小的形状。
7、优选的,所述主动齿轮与从动齿轮之间为啮合关系,且主动齿轮的宽度略小于从动齿轮的宽度。
8、与现有技术相比,本实用新型的有益效果是:
9、1、本实用新型中,通过设置的步进电机、主动齿轮和从动齿轮,可以根据打印速度的不同,打印机对步进电机的转速进行实时调整,以此来调整进料速度以满足打印工作需求,且齿轮传动较为准确,而且可以应对各种复杂的工作环境,是带传动以及链条传动所不能胜任的;
10、2、本实用新型中,通过设置的长条孔、钩子、弹簧、轴和下压轮,可以对不同直径的原料进行夹持,轴在弹簧的作用下,在长条孔内是浮动的,而且在弹簧弹力的作用下,原料会被一直夹持住,打印任务结束,原料不再进入打印机时,原料不会落回原料箱,在下一次打印时,不需要再次手动送料。
技术特征:1.一种稳定放料的打印机抓取机构,包括进料管(1),其特征在于:所述进料管(1)一端设置有壳体(2),所述壳体(2)外侧设有圆孔(3)和长条孔(4),所述圆孔(3)内部转动连接有轴(5),所述轴(5)一端固定连接有从动齿轮(6),所述轴(5)中间位置固定连接有上压轮(7),所述上压轮(7)外侧固定连接有凸起(8),所述轴(5)两端设有凹槽(14),所述凹槽(14)内卡合有钩子(11),所述钩子(11)底端设有连接板(12),所述连接板(12)一端固定连接有弹簧(13),所述壳体(2)顶端固定连接有步进电机(9),所述步进电机(9)一端固定连接有主动齿轮(10),所述长条孔(4)内滑动连接的轴(5)的中间位置转动连接有下压轮(15)。
2.根据权利要求1所述的一种稳定放料的打印机抓取机构,其特征在于:所述连接板(12)数量为四个,两个为一组,共计两组,对称布置于弹簧(13)的两侧。
3.根据权利要求1所述的一种稳定放料的打印机抓取机构,其特征在于:所述凹槽(14)的宽度略大于钩子(11)的宽度,钩子(11)可以卡合在凹槽(14)内。
4.根据权利要求1所述的一种稳定放料的打印机抓取机构,其特征在于:所述上压轮(7)与下压轮(15)均为两端大,中间小的形状。
5.根据权利要求1所述的一种稳定放料的打印机抓取机构,其特征在于:所述主动齿轮(10)与从动齿轮(6)之间为啮合关系,且主动齿轮(10)的宽度略小于从动齿轮(6)的宽度。
技术总结本技术涉及打印机技术领域,尤其为一种稳定放料的打印机抓取机构,包括进料管,所述进料管一端设置有壳体,所述壳体外侧设有圆孔和长条孔,所述圆孔内部转动连接有轴,所述轴一端固定连接有从动齿轮,所述轴中间位置固定连接有上压轮,所述上压轮外侧固定连接有凸起,所述轴两端设有凹槽,所述凹槽内卡合有钩子,所述构造底端设有连接板,所述连接板一端固定连接有弹簧,本技术中,通过设置的步进电机、主动齿轮和从动齿轮,可以根据打印速度的不同,打印机对步进电机的转速进行实时调整,以此来调整进料速度以满足打印工作需求,且齿轮传动较为准确,而且可以应对各种复杂的工作环境,是带传动以及链条传动所不能胜任的。技术研发人员:洪瑞平,张永锋受保护的技术使用者:东莞协挥精密五金有限公司技术研发日:20231114技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240723/213249.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表