一种橡胶颗粒检测筛选系统及方法与流程
- 国知局
- 2024-08-01 03:54:02
本发明涉及一种筛选系统及方法,具体涉及一种橡胶颗粒检测筛选系统及方法,属于橡胶生产。
背景技术:
1、橡胶生产过程中,不可避免的会产生具有不合格颜色的橡胶颗粒,这部分橡胶颗粒被称为“色胶”。虽然色胶出现概率较小,但色胶的出现难以避免,从而严重影响橡胶成品质量,因此橡胶生产过程中需要检测和筛选具有缺陷的色胶。
2、现有技术中,对于色胶的检测筛选通常在压制橡胶块步骤后通过视觉检测系统进行,具体过程为:橡胶颗粒经流化床干燥后,通过震动传送带运输进入压块机后压制成一定规格的橡胶块,再通过输送机将橡胶块送至视觉检测系统的工业相机前,由工业相机对橡胶块的六个面分别进行拍照,通过控制装置执行预设算法对工业相机的照片进行检测,若发现任何部位的颜色异常,则将该橡胶块通过输送机引导至废胶箱中进行后续处理。
3、上述视觉检测系统虽然能够实现色胶的检出、以及具有色胶的缺陷橡胶块的筛选剔除,但存在以下缺点:一、通过工业相机采集橡胶块的六个表面照片,仅能识别出橡胶块的表面是否出现色胶,无法判断橡胶块的内部是否出现色胶;二、橡胶块相对橡胶颗粒体积较大,压制成的橡胶块一般重量为25kg,废弃具有色胶的橡胶块浪费较大。
技术实现思路
1、基于以上背景,本发明的目的在于提供一种橡胶颗粒检测筛选系统,在压制橡胶块之前对橡胶颗粒进行色胶检测和筛选,实现橡胶颗粒的自动化准确检测和快速筛选,提高检测筛选效率。
2、本发明的另一目的在于提供一种橡胶颗粒检测筛选方法,提高对于橡胶颗粒的筛选精度和筛选效率。
3、为了实现上述发明目的,本发明提供以下技术方案:
4、一种橡胶颗粒检测筛选系统,包括:
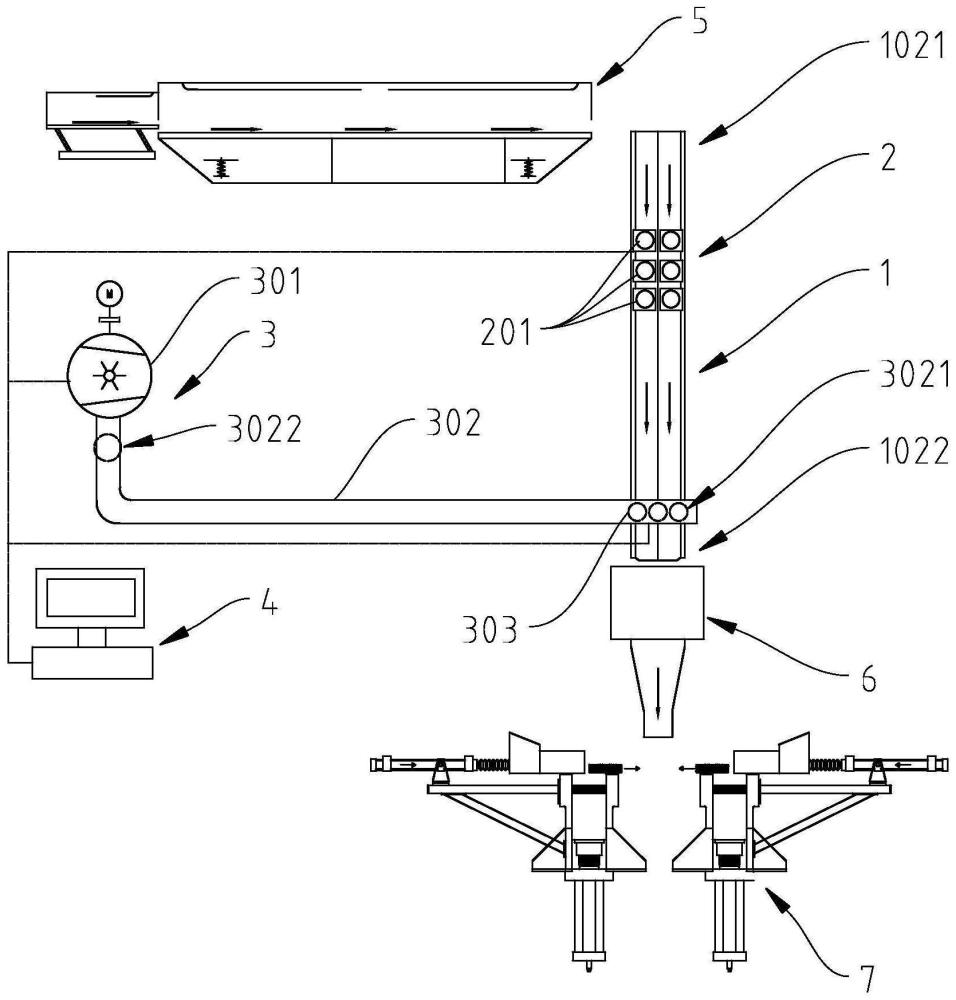
5、振动输送装置,所述振动输送装置包括承重底座以及设置在承重底座上的传送槽、减振器和振动电机,所述传送槽位于承重底座顶部,传送槽通过减振器与承重底座连接,传送槽一端为进料端且另一端为出料端,所述振动电机与传送槽的外壁连接;
6、视觉检测装置,设于所述振动输送装置上方且邻近所述传送槽的进料端,所述视觉检测装置包括至少三组设于传送槽上方的工业相机,所述工业相机用于采集传送槽上输送的橡胶颗粒的图像;
7、负压筛选装置,设于所述振动输送装置上方且邻近所述传送槽的出料端,所述负压筛选装置包括真空发生器、负压管道和电动阀门,所述负压管道设有吸料口和下料口,所述吸料口邻近于所述传送槽的出料端,所述电动阀门设于所述负压管道上且邻近所述吸料口,所述真空发生器连通所述负压管道且邻近所述下料口;
8、控制装置,所述控制装置分别与工业相机、真空发生器和电动阀门电性连接,控制装置用于接收所述工业相机采集的图像并根据所述图像辨识色胶、以及根据辨识结果控制电动阀门的启闭和真空发生器的启闭。
9、作为优选,所述每组工业相机的数量至少为两个,至少两个所述工业相机的图像采集方向均垂直于所述传送槽的表面。
10、作为优选,所述负压管道的数量和所述电动阀门的数量均为多个,每个负压管道上设置一个电动阀门,每个负压管道均连通真空发生器,多个负压管道沿所述传送槽的宽度方向呈线性等间距排列,且每个负压管道的吸料口均垂直于所述传送槽的表面。
11、一种采用以上任一所述的橡胶颗粒检测筛选系统进行橡胶颗粒检测筛选的方法,该方法包括以下步骤:
12、橡胶颗粒置于传送槽的进料端,设定振动频率和输送速度v,开启振动电机,使橡胶颗粒沿传送槽振动前进;
13、工业相机以设定采样频率对橡胶颗粒进行图像采集,控制装置执行图像识别算法,根据采集的图像辨识色胶,当辨识为色胶时,控制装置记录色胶在传送槽传送面上的第一坐标(x1,y1)和检测时刻t1;
14、控制装置执行轨迹预测算法,根据色胶的第一坐标和最大振动偏差u,预测色胶在负压管道吸料口中心线所处的传送槽传送面纵坐标y2所对应的横坐标x2,获得色胶在传送槽传送面上的预测第二坐标范围(x2-u,y2)~(x2+u,y2);
15、控制装置根据负压管道数量n将负压管道对应的传送槽传送面区域划分为n个分区,每个分区的宽度为d/n,并获得每个分区的边界坐标,其中d为传送槽宽度;
16、控制装置比对预测第二坐标范围与每个分区的边界坐标,当预测第二坐标范围完全处于单个分区内时,则在吸料时刻t2开启该分区负压管道所对应的电动阀门进行吸料,当预测第二坐标范围处于相邻多个分区时,则在吸料时刻t2开启相邻多个分区负压管道所对应的全部电动阀门进行吸料;
17、控制装置维持电动阀门开启设定时段后,关闭电动阀门,色胶以及相邻的多个橡胶颗粒被吸入负压管道且通过下料口排出,控制装置开启真空发生器并维持设定时段,使负压管道维持真空状态准备下一次吸料操作。
18、作为优选,所述轨迹预测算法为kalman递归滤波算法、arima时间序列分析算法、markov链算法、随机森林算法、svm支持向量机回归算法中的一种。
19、作为优选,所述轨迹预测算法为kalman递归滤波算法,轨迹预测算法的模型构建中,状态方程采用以下数学表达式,
20、xk=axk-1+bu k-1+w k-1;
21、式中,xk表示色胶在k时刻的位置速度向量,xk-1表示色胶在k-1时刻的位置速度向量,a表示2×2的状态转移矩阵,b表示2×1的控制输入矩阵,u k-1表示包含振动频率的控制向量,w k-1表示过程噪声;
22、测量方程采用以下数学表达式,
23、zk=cxk+vk;
24、式中,zk表示k时刻测量的色胶位置,c表示1×2的测量矩阵,vk表示测量噪声。
25、作为优选,所述吸料时刻t2的计算方法包括以下步骤:
26、通过kalman递归滤波算法状态方程进行二阶状态估计,迭代预测色胶位置和速度;
27、记录每次预测的色胶位置与负压管道吸料口中心线所处的传送槽传送面纵坐标所在直线的垂直距离;
28、累加每次预测的色胶速度,计算色胶累计行进距离;
29、当色胶累计行进距离首次大于上述垂直距离时,记录此时的预测时刻作为吸料时刻t2。作为优选,所述最大振动偏差u采用以下数学表达式计算,
30、u=3σ(x);
31、式中,σ(x)表示色胶振动而在传送槽传送面x坐标的标准差,σ(x)采用以下数学表达式计算,
32、
33、式中,xi表示采集获得的色胶在第i个位置的值,xp表示采集获得的不同时刻色胶在x坐标位置的平均值,m是数据采集点的数量。
34、与现有技术相比,本发明具有以下优点:
35、本发明的一种橡胶颗粒检测筛选系统,通过振动输送装置以振动方式输送橡胶颗粒通过视觉检测装置下方,由于橡胶颗粒在振动前进过程中姿态不断变化,至少三组工业相机能够全面的采集橡胶颗粒每个面的图像,当控制装置根据采集图像辨识出色胶时,即根据辨识结果控制电动阀门的启闭和真空发生器的启闭,使负压筛选装置将色胶以及相邻的多个橡胶颗粒吸入负压管道,从而将色胶由振动输送装置上剔除,而良品橡胶颗粒继续振动前行进入后续压块机压制成橡胶块,该橡胶颗粒检测筛选系统实现橡胶颗粒的自动化准确检测和快速筛选,提高检测筛选效率;
36、本发明的一种橡胶颗粒检测筛选方法,能够在控制装置根据视觉检测装置采集图像辨识出色胶后,较为准确的预测色胶振动前进的行动轨迹,从而根据预测的色胶未来位置开启对应分区的电动阀门使负压管道吸料,减少随色胶被剔除的良品橡胶颗粒,进一步提高筛选效率,减少良品损耗。
本文地址:https://www.jishuxx.com/zhuanli/20240723/214254.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表