一种电子背压闭环控制方法与流程
- 国知局
- 2024-08-01 04:40:16
本发明涉及背压控制系统,特别是涉及一种电子背压闭环控制方法。
背景技术:
1、在纱线卷绕系统中,背压控制可调节纱筒与摩擦辊(罗拉)之间的接触力,从而在一定程度上调整纱线的卷绕密度,改善纱筒的成型和松紧程度,尤其在一些特定的应用场景中具有显著优势。
2、然而,传统的背压控制系统多是基于机械结构的开环控制,控制精度和一致性均难以保证,且在需要更改背压控制目标值时,需要通过人为调整弹簧机构的角度及松紧程度来完成,该过程需逐锭手动进行,且操作过程中还需借助扳手、弹簧秤等其它工具的辅助,投入人力多,操作难度大。为解决上述问题,在以往应用中也曾提出过一些简易的电子背压控制系统,从而简化了背压目标值设置的问题,然而其方法同样是基于运行经验而提出的开环控制策略,由于缺乏反馈,其控制精度和控制效果均不够理想。
技术实现思路
1、为了克服现有技术的不足,本发明的目的是提供一种电子背压闭环控制方法,可根据设定的背压控制目标值实时计算控制量,并根据测力传感器实时获知背压控制的实际控制结果,从而实现背压的闭环控制,能够有效提高背压控制系统的操作便捷性、控制精度和控制结果的一致性。
2、为实现上述目的,本发明提供了如下方案:一种电子背压闭环控制方法,包括以下步骤:
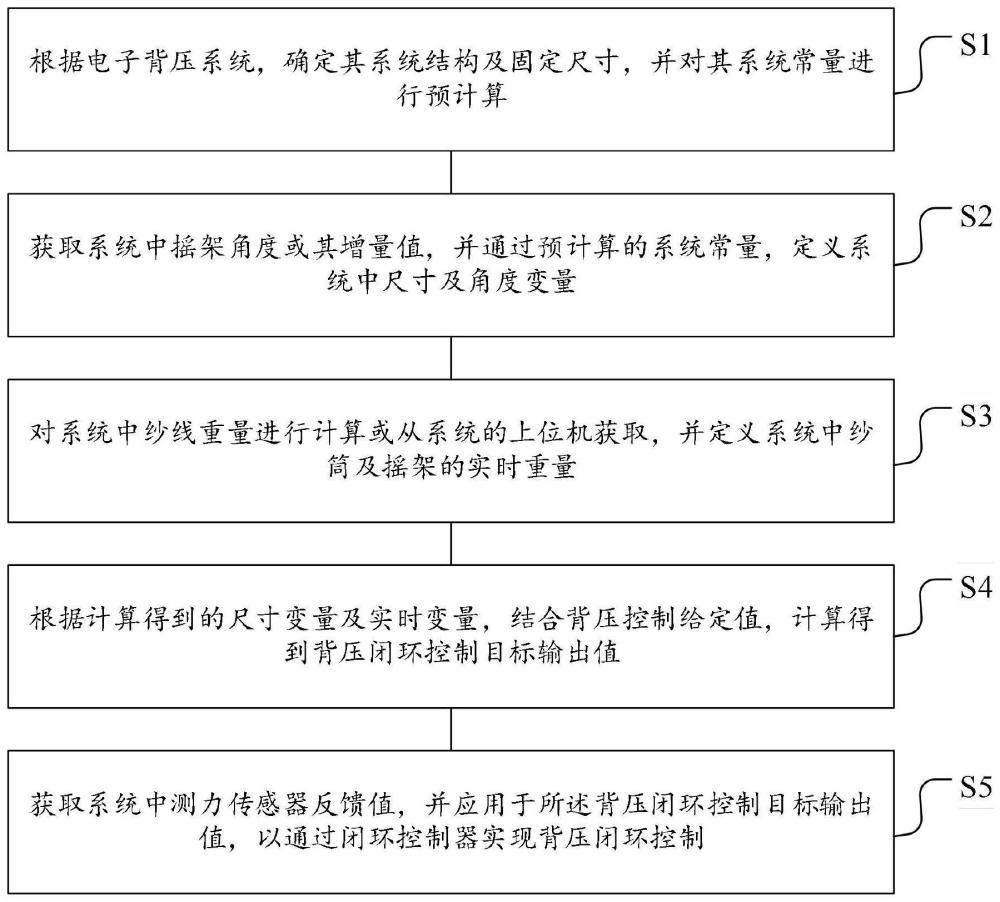
3、s1、根据电子背压系统,确定其系统结构及固定尺寸,并对其系统常量进行预计算;
4、s2、获取系统中摇架角度或其增量值,并通过预计算的系统常量,定义系统中尺寸及角度变量;
5、s3、对系统中纱线重量进行计算或从系统的上位机获取,并定义系统中纱筒及摇架的实时重量;
6、s4、根据计算得到的尺寸变量及实时变量,结合背压控制给定值,计算得到背压闭环控制目标输出值;
7、s5、获取系统中测力传感器反馈值,并应用于所述背压闭环控制目标输出值,以通过闭环控制器实现背压闭环控制。
8、优选的,在所述步骤s1中,系统的固定尺寸包括:罗拉半径r、空筒半径r0、摇架上摇臂长度l1、罗拉支点与摇架支点之间的水平距离l3、罗拉支点与摇架支点之间的竖直距离l4、摇架下摇臂长度l6、摇架支点与螺杆支点之间的竖直距离l7、摇架支点与螺杆支点之间的水平距离l8。
9、优选的,对系统常量的预计算包括:
10、罗拉支点与摇架支点之间连线距离l5:
11、
12、摇架支点与螺杆支点之间连线距离l9:
13、
14、l5与l3之间的夹角α1:
15、α1=arctan(l4/l3);
16、l8与l9之间的夹角θ:
17、θ=arctan(l7/l8);
18、摇架空筒状态下的角度α0:
19、
20、优选的,在步骤s2中,根据系统中角度传感器实时检测摇架角度或其增量值,计算系统中尺寸及角度变量包括:
21、摇架与l5之间的夹角α2:
22、α2=α-α1或α2=α0+δα;
23、其中,α为摇架角度,δα为角度增量值;
24、罗拉支点与纱筒中心点之间的距离l2:
25、
26、l2与水平方向之间的夹角β:
27、β=arcsin((l1*sinα-l4)/l2)或β=arcsin(l1*sinα2/l2)-α1;
28、螺杆与l9之间的夹角θ1:
29、θ1=arccot[(l9/l6+cos(α+θ))/sin(α+θ)];
30、螺杆与水平方向之间夹角θ2:
31、θ2=θ-θ1。
32、优选的,在所述步骤s3中,定义系统中纱筒及摇架的实时重量为:
33、g=g1+g2;
34、其中,g为纱筒及摇架的实时重量,g1为系统的固有重量,g2为纱线重量。
35、优选的,所述系统的固有重量g1包括但不限于管子重量、摇架重量,所述纱线重量g2通过卷绕过程中实时计算或通过纱筒当前直径进行折算。
36、优选的,在所述步骤s4中,所述背压闭环控制目标输出值的计算过程为:
37、
38、其中,f为背压闭环控制目标输出值,l1为摇架上摇臂长度,g为纱筒及摇架实时重量,n为背压给定值,α为摇架角度,β为l2与水平方向之间的夹角,l6为摇架下摇臂长度,θ2为螺杆与水平方向之间的夹角。
39、优选的,根据背压控制目标输出值f及测力传感器反馈值f*,通过闭环控制器的跟踪调节,实现对背压给定值n的闭环控制,采用的闭环控制器形式包括但不限于p、pi、pd、pid。
40、根据本发明提供的具体实施例,本发明公开了以下技术效果:
41、本发明提供了一种电子背压闭环控制方法,可根据设定的背压控制目标值实时计算控制量,并根据测力传感器实时获知背压控制的实际控制结果,从而实现背压的闭环控制,能够有效提高背压控制系统的操作便捷性、控制精度和控制结果的一致性。
技术特征:1.一种电子背压闭环控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种电子背压闭环控制方法,其特征在于,在步骤s1中,系统的固定尺寸包括:罗拉半径r、空筒半径r0、摇架上摇臂长度l1、罗拉支点与摇架支点之间的水平距离l3、罗拉支点与摇架支点之间的竖直距离l4、摇架下摇臂长度l6、摇架支点与螺杆支点之间的竖直距离l7、摇架支点与螺杆支点之间的水平距离l8。
3.根据权利要求2所述的一种电子背压闭环控制方法,其特征在于,对系统常量的预计算包括:
4.根据权利要求1或3所述的一种电子背压闭环控制方法,其特征在于,在步骤s2中,根据系统中角度传感器实时检测摇架角度或其增量值,计算系统中尺寸及角度变量包括:
5.根据权利要求1所述的一种电子背压闭环控制方法,其特征在于,在步骤s3中,定义系统中纱筒及摇架的实时重量为:
6.根据权利要求5所述的一种电子背压闭环控制方法,其特征在于,所述系统的固有重量g1包括但不限于管子重量、摇架重量,所述纱线重量g2通过卷绕过程中实时计算或通过纱筒当前直径进行折算。
7.根据权利要求1所述的一种电子背压闭环控制方法,其特征在于,在步骤s4中,所述背压闭环控制目标输出值的计算过程为:
8.根据权利要求7所述的一种电子背压闭环控制方法,其特征在于,根据背压控制目标输出值f及测力传感器反馈值f*,通过闭环控制器的跟踪调节,实现对背压给定值n的闭环控制,采用的闭环控制器形式包括但不限于p、pi、pd、pid。
技术总结本发明提供了一种电子背压闭环控制方法,属于背压控制系统领域,包括:确定电子背压系统结构及固定尺寸,并对其系统常量进行预计算;获取系统中摇架角度或其增量值,定义系统中尺寸及角度变量;对系统中纱线重量进行计算或从系统的上位机获取,定义系统中纱筒及摇架的实时重量;通过尺寸变量及实时重量,结合背压控制给定值,计算背压闭环控制目标输出值;获取系统中测力传感器反馈值,结合背压闭环控制目标输出值,以通过闭环控制器实现背压闭环控制。本发明根据设定的背压控制目标值实时计算控制量,并根据测力传感器实时获知背压控制的实际控制结果,从而实现背压的闭环控制,有效提高背压控制系统的操作便捷性、控制精度和控制结果的一致性。技术研发人员:刘京宫,董辉受保护的技术使用者:北京和利时电机技术有限公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240723/216455.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表