一种可移动式降尘机器人的制作方法
- 国知局
- 2024-07-29 12:11:25
:本技术涉及粉尘治理,特别是涉及一种可移动式降尘机器人。
背景技术
0、背景技术:
1、在煤炭洗选行业在现场作业时,很多操作环节都会产生大量的煤粉尘,这些粉尘不光会伤害作业人员的呼吸系统,还存在着粉尘爆炸的巨大安全隐患。因此通常在实际生产现场中,煤炭作业降尘通常采用水雾喷水降尘,通过在作业区域内上空每隔一定距离设置水管道和雾化喷头,在作业时持续喷水进行降尘;但需要降尘的区域通常较大,如洗选行业使用的皮带输送机,其作业长度较长,来料和下料各输送段都有可能产生大量粉尘;如采用上述降尘方式用水量较大,未起尘的地方也在喷水造成了水的浪费,无法精准的对起尘源进行降尘。且要覆盖整个作业区域,通常会设置多个喷头,如果喷头堵塞,需要停机人工到现场维护拆卸清洁,同时在高处维护多个喷头,维护比较繁琐。
2、为解决上述问题现有的方案中,提供的可移动的喷雾降尘装置,其喷头直接暴露在工作区域粉尘较多的区域,长时间容易发生堵塞,且由处于场设备和人员相同的高度,其喷头容易发生碰撞导致损坏。
技术实现思路
0、技术实现要素:
1、本实用新型的目的在于提供一种可移动式降尘机器人,以解决现有技术中经常需要人工频繁维护、操作繁琐,无法精准降尘,用水量较大的问题。
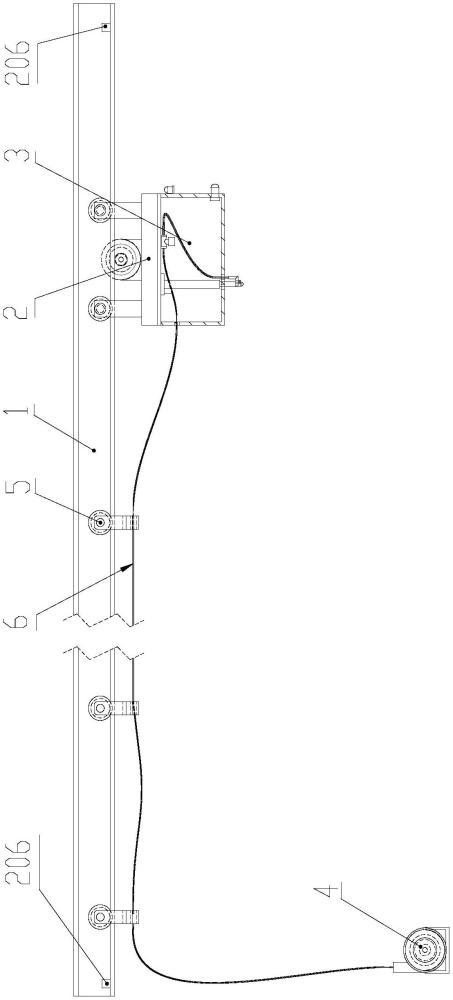
2、本实用新型的技术方案包括:轨道、巡航机构、降尘机构、增压泵;所述降尘机构包括箱体、升降装置、电控阀、粉尘检测开关、喷头,在箱体顶面内壁固定设置有升降装置,升降装置可升降的自由端固定安装有喷头,升降装置可升降的自由端从箱体底部开孔伸出,在箱体的侧壁上设有粉尘检测开关,粉尘检测开关与电控阀、电机、升降装置电气连接;巡航机构沿轨道行走,降尘机构的箱体固定连接在巡航机构的主机架下方,增压泵通过软管与降尘机构内的电控阀相连,电控阀通过软管与喷头相连,软管及相关线缆通过吊环吊装在轨道下方。
3、所述巡航机构包括主机架、驱动轮、电机、吊臂和滑轮;主机架上竖直设置有四个吊臂,每个吊臂的顶端活动连接一个滑轮,其中两组吊臂和滑轮设置在轨道的一侧,另外两组吊臂和滑轮对称设置轨道另一侧,滑轮在“工字型”轨道两侧的槽内滚动,电机固定安装在主机架上,电机的输出轴上安装有一个驱动轮,驱动轮紧贴在轨道的下表面上,电机与两个限位开关电气连接。
4、进一步的,所述限位开关为接近开关或行程开关或光电开关。
5、进一步的,所述喷头为扇形喷头或伞状喷头或螺旋喷头中的一种。
6、进一步的,所述箱体的外壁安装有警报器。
7、本实用新型具有以下有益效果:与现有技术相比,通过在轨道上可移动的巡航机构和降尘机构,完全覆盖了作业区域,在降尘机构内设有粉尘检测开关和升降装置,可以定位粉尘较大的区域,在喷雾降尘作业时将喷头伸出箱体,进行定点降尘,减少了水资源的浪费,精准的对起尘源进行降尘,在停止降尘时,可以将喷头收回,避免发生碰撞损坏喷头,同时升高喷头避免了下方粉尘的沾染降低了喷头堵塞的可能性,减少了人工维护的操作。
技术特征:1.一种可移动式降尘机器人,其特征在于,包括轨道(1)、巡航机构(2)、降尘机构(3)、增压泵(4);所述降尘机构(3)包括箱体(301)、升降装置(302)、电控阀(303)、粉尘检测开关(304)、喷头(305),在箱体(301)顶面内壁固定设置有升降装置(302),升降装置(302)可升降的自由端固定安装有喷头(305),升降装置(302)可升降的自由端从箱体(301)底部开孔伸出,在箱体(301)的侧壁上设有粉尘检测开关(304),粉尘检测开关(304)与电控阀(303)、电机(203)、升降装置(302)电气连接;巡航机构(2)沿轨道(1)行走,降尘机构(3)的箱体(301)固定连接在巡航机构(2)的主机架(201)下方,增压泵(4)通过软管(6)与降尘机构(3)内的电控阀(303)相连,电控阀(303)通过软管(6)与喷头(305)相连,软管(6)及相关线缆通过吊环(5)吊装在轨道(1)下方。
2.根据权利要求1所述的一种可移动式降尘机器人,其特征在于,所述巡航机构(2)包括主机架(201)、驱动轮(202)、电机(203)、吊臂(204)、滑轮(205)和限位开关(206);主机架(201)上竖直设置有四个吊臂(204),每个吊臂(204)的顶端活动连接一个滑轮(205),其中两组吊臂(204)和滑轮(205)设置在轨道(1)的一侧,另外两组吊臂(204)和滑轮(205)对称设置轨道(1)另一侧,滑轮在“工字型”轨道(1)两侧的槽内滚动,电机(203)固定安装在主机架(201)上,电机(203)的输出轴上安装有一个驱动轮(202),驱动轮(202)紧贴在轨道(1)的下表面上,两个限位开关(206)分别设置在轨道(1)的两端,电机(203)与两个限位开关(206)电气连接。
3.根据权利要求2所述的一种可移动式降尘机器人,其特征在于,所述限位开关(206)为接近开关或行程开关或光电开关。
4.根据权利要求1所述的一种可移动式降尘机器人,其特征在于,所述喷头(305)为扇形喷头或伞状喷头或螺旋喷头中的一种。
5.根据权利要求1所述的一种可移动式降尘机器人,其特征在于,所述箱体(301)的外壁安装有警报器(306)。
技术总结本技术公开了一种可移动式降尘机器人主要包括固定设置在作业区域上方的轨道、可沿轨道滑动的巡航机构、固定安装在巡航机构下方的降尘机构、粉尘检测开关和供水的增压泵,降尘机构的喷头喷淋时可以伸出,停止喷淋时可以收回,使得能精准定位起尘源并高效降尘,进一步达到了节约水资源的目的。技术研发人员:郝英超,苏泓文,郝天宝,陈仲叔,刘志明受保护的技术使用者:鄂尔多斯市钰泰圆翰技术有限公司技术研发日:20231102技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240725/139670.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表