一种六自由度机械臂隔离开关带电清扫装置的制作方法
- 国知局
- 2024-07-29 13:14:11
本发明属于电力运维,具体为一种六自由度机械臂隔离开关带电清扫装置。
背景技术:
1、隔离开关长期裸露在污染较严重的大气环境当中运行,运行中的隔离开关因长期遭受环境当中有害污染物质的侵蚀,大大的降低了其安全运行的可靠性。导致了运行中的隔离开关经常出现一些故障,而这些由于污染引起的故障有时会造成巨大的伤亡以及经济损失。因此,及时对隔离开关进行清理养护是确保其安全运行的必要措施。然而,正在运行的隔离开关不能停电进行养护,若强行停电进行养护,会给企业带来很大的经济损失。
2、这就需要有一种安全可靠的技术手段,实现在带电状态下对隔离开关进行清洗绝缘养护。现有技术中,已有诸多此方面的尝试,然而普遍存在着技术缺陷。一是可靠性较低。采用技改的方式设计出的隔离开关带电清扫装置,上下移动刷子清洗上下触版,边旋转边清洗的方式可能会有遗漏的地方没有清洗完全。二是耗时相对较长。采用技改的方式设计出的隔离开关带电清扫装置,此种方式需企业对相应的类似的构件进行试验、验证功能结构是否合理,并在此基础上进行改善。三是功能单一、通用性差。现有隔离开关带电清扫装置,普遍只适配一种规格的隔离开关,其他规格的隔离开关几乎不能通用,只能适用于特定设备的作业。四是拆装复杂。现有隔离开关带电清扫装置,大多采用杆拼接而成,操作时安装方法较为繁琐,拆装复杂。
技术实现思路
1、本发明旨在针对现有技术的技术缺陷,提供一种六自由度机械臂隔离开关带电清扫装置,以解决目前,用于隔离开关的常规带电清扫装置可靠性较低、功能单一、通用性差、拆装复杂等技术问题。
2、为实现以上技术目的,本发明采用以下技术方案:
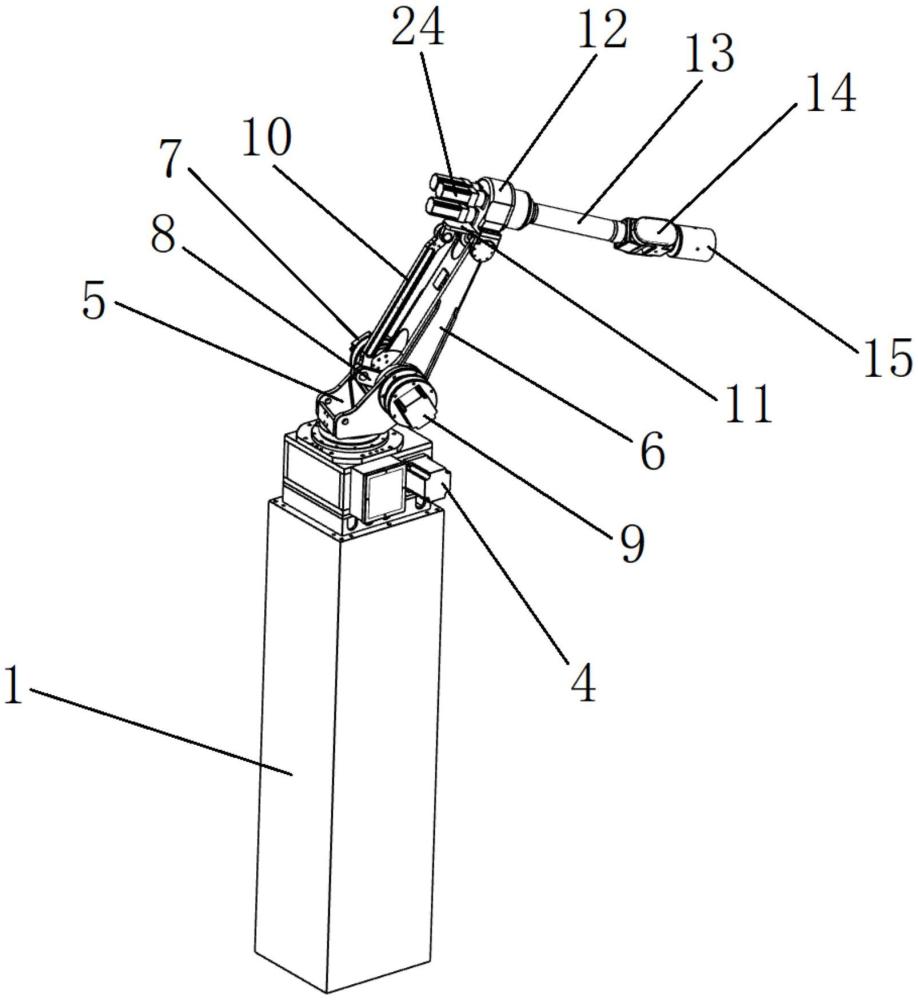
3、一种六自由度机械臂隔离开关带电清扫装置,包括底座,蜗轮,蜗杆,第一电机,驱动臂底座,驱动大臂,第二电机,传动杆,第三电机,中臂连杆,旋转臂支座,安装座,外轴,悬臂,喷头,其中,在底座上转动连接有蜗轮,蜗杆与蜗轮相互啮合,蜗杆与第一电机传动连接,驱动臂底座与蜗轮保持固定,在驱动臂底座上转动连接有驱动大臂,在驱动大臂与驱动臂底座之间的转轴处连接有第二电机,传动杆的一端转动连接在驱动大臂上,在传动杆与驱动大臂之间的转轴处连接有第三电机,传动杆的另一端与中臂连杆的下端转动连接,旋转臂支座的前侧转动连接在驱动大臂上,旋转臂支座的后侧与中臂连杆的上端转动连接,在旋转臂支座上固定连接有安装座,在安装座上转动连接有外轴,在外轴上转动连接有悬臂,在悬臂上转动连接有喷头。
4、作为优选,蜗轮的轴与第二电机的轴相互垂直;旋转臂支座与驱动大臂之间的转轴、旋转臂支座与中臂连杆之间的转轴、第三电机的轴、第二电机的轴四者相互平行;悬臂与外轴之间的转轴垂直于外轴;悬臂与外轴之间的转轴垂直于喷头与悬臂之间的转轴。
5、作为优选,在外轴的内部穿插有中轴,在中轴的前端固结有第一主动齿轮,第一从动齿轮固结在悬臂与外轴之间的转轴上,第一主动齿轮与第一从动齿轮相互啮合。
6、作为优选,在外轴的前端固结有第二主动齿轮,在悬臂上设置有从动齿轮组,第二主动齿轮通过从动齿轮组驱动喷头与悬臂之间的转轴旋转。
7、作为优选,在中轴的内部穿插有内轴,在内轴的延伸路径上设置有蜗轮蜗杆机构。
8、作为优选,喷头呈圆柱体形状,在喷头的外壁上设置有若干喷孔,所述喷孔与连接在喷头上的酒精管路相连通。
9、作为优选,在外轴的后端固结有输入齿轮,第四电机驱动输入齿轮旋转。
10、作为优选,第四电机为行星减速电机。
11、作为优选,底座为绝缘材质。
12、作为优选,在悬臂上设置有摄像头。
13、在以上技术方案中,底座宜采用可拼接底座,高度可设计为2000mm,材料应选用高强度绝缘材质,起到支撑机械臂与绝缘的作用。底座上的蜗轮、蜗杆、第一电机等部件构成减速器结构,为其上的驱动臂底座、驱动大臂等结构提供沿竖直轴的360度旋转能力。驱动臂底座用于承载驱动大臂,作为支撑与传递力的结构。驱动大臂作为连接驱动臂底座与旋转臂支座的结构,在第二电机的驱动下,驱动大臂可在驱动臂底座上做俯仰运动。旋转臂支座通过销衔接在驱动大臂上,起到支撑旋转臂以及连接驱动大臂的作用。当第三电机驱动传动杆转动时,可推动中臂连杆,从而在一定范围内调节旋转臂支座在驱动大臂上的俯仰角度。在旋转臂的构造中,安装座为后端支撑结构,在其前侧由外轴、悬臂、喷头构成的三段结构,外轴可由输入齿轮、第四电机(可以为行星减速机)驱动;在此基础上,可在喷头与悬臂间的转轴和外轴之间构建由第二主动齿轮和从动齿轮组组成的传动结构,从而实现喷头和外轴的同步旋转;此外,可增设第二组行星减速机,驱动中轴旋转,在第一主动齿轮、第一从动齿轮的传动下驱动悬臂在外轴上的俯仰运动;另外,可增设第三组行星减速机,驱动内轴旋转,连接驱动轴尾部的蜗杆结构,实现旋转轴的水平伸缩,伸缩长度可设计为200mm。喷头亦可称为清扫装置,根据工艺的需要可选择合适的打磨单元(如滚筒毛刷),其内部为空心结构,带有腔体,一端可接有酒精管路;其外壁可设置3个空心孔,直径可以为10mm,当滚筒毛刷静止时,可保存酒精溶液,当其动作时,酒精溶液随着转动均匀的喷涂在待清扫设备上。
14、本发明的典型运行过程如下:
15、s1、将可拆卸底座与上部清扫装置组装完成,放置距待清扫设备一定距离范围内。
16、s2、打开旋转臂电机开关,使腔体中的酒精溶液浸湿打磨单元(滚桶毛刷)。
17、s3、通过摄像头调整大臂与小臂的位置,使得打磨单元与待清扫隔离开关静触头面接触。
18、s4、打开旋转臂电机开关,通过调整电机的频率控制打磨单元转动速率;通过控制第三组行星减速机,从而实现旋转小臂的水平伸缩。
19、本发明公开了一种六自由度机械臂隔离开关带电清扫装置。此装置具有结构简单,安装方便、重量轻等特点,专门用于电力行业的隔离开关清扫工作,可适用于不同规格的隔离开关,实现了电力行业中隔离开关的高效清扫。
20、应用本发明,首先能够在带电状态下对隔离开关进行机械扫刷,在此基础上,可使用电器机械设备清洗剂对清扫过的隔离开关进行高压射流清洗,最后对清洗后的隔离开关使用漏电保护液进行绝缘养护。从而全面的解决了设备因环境污染而导致的绝缘下降等问题。
21、本发明的有益效果还集中体现在以下方面:
22、1、解决了现有隔离开关带电清扫装置安装复杂的问题。
23、2、解决了现有隔离开关带电清扫装置通用性差、功能单一的问题。
24、3、可有效扩大带电清扫作业的应用范围,适用于多种规格的隔离开关的带电清扫。
技术特征:1.一种六自由度机械臂隔离开关带电清扫装置,其特征在于包括底座(1),蜗轮(2),蜗杆(3),第一电机(4),驱动臂底座(5),驱动大臂(6),第二电机(7),传动杆(8),第三电机(9),中臂连杆(10),旋转臂支座(11),安装座(12),外轴(13),悬臂(14),喷头(15),其中,在底座(1)上转动连接有蜗轮(2),蜗杆(3)与蜗轮(2)相互啮合,蜗杆(3)与第一电机(4)传动连接,驱动臂底座(5)与蜗轮(2)保持固定,在驱动臂底座(5)上转动连接有驱动大臂(6),在驱动大臂(6)与驱动臂底座(5)之间的转轴处连接有第二电机(7),传动杆(8)的一端转动连接在驱动大臂(6)上,在传动杆(8)与驱动大臂(6)之间的转轴处连接有第三电机(9),传动杆(8)的另一端与中臂连杆(10)的下端转动连接,旋转臂支座(11)的前侧转动连接在驱动大臂(6)上,旋转臂支座(11)的后侧与中臂连杆(10)的上端转动连接,在旋转臂支座(11)上固定连接有安装座(12),在安装座(12)上转动连接有外轴(13),在外轴(13)上转动连接有悬臂(14),在悬臂(14)上转动连接有喷头(15)。
2.根据权利要求1所述的一种六自由度机械臂隔离开关带电清扫装置,其特征在于,蜗轮(2)的轴与第二电机(7)的轴相互垂直;旋转臂支座(11)与驱动大臂(6)之间的转轴、旋转臂支座(11)与中臂连杆(10)之间的转轴、第三电机(9)的轴、第二电机(7)的轴四者相互平行;悬臂(14)与外轴(13)之间的转轴垂直于外轴(13);悬臂(14)与外轴(13)之间的转轴垂直于喷头(15)与悬臂(14)之间的转轴。
3.根据权利要求1所述的一种六自由度机械臂隔离开关带电清扫装置,其特征在于,在外轴(13)的内部穿插有中轴(18),在中轴(18)的前端固结有第一主动齿轮(16),第一从动齿轮(17)固结在悬臂(14)与外轴(13)之间的转轴上,第一主动齿轮(16)与第一从动齿轮(17)相互啮合。
4.根据权利要求1所述的一种六自由度机械臂隔离开关带电清扫装置,其特征在于,在外轴(13)的前端固结有第二主动齿轮(19),在悬臂(14)上设置有从动齿轮组(20),第二主动齿轮(19)通过从动齿轮组(20)驱动喷头(15)与悬臂(14)之间的转轴旋转。
5.根据权利要求1所述的一种六自由度机械臂隔离开关带电清扫装置,其特征在于,在中轴(18)的内部穿插有内轴(21),在内轴(21)的延伸路径上设置有蜗轮蜗杆机构。
6.根据权利要求1所述的一种六自由度机械臂隔离开关带电清扫装置,其特征在于,喷头(15)呈圆柱体形状,在喷头(15)的外壁上设置有若干喷孔(22),所述喷孔(22)与连接在喷头(15)上的酒精管路相连通。
7.根据权利要求1所述的一种六自由度机械臂隔离开关带电清扫装置,其特征在于,在外轴(13)的后端固结有输入齿轮(23),第四电机(24)驱动输入齿轮(23)旋转。
8.根据权利要求7所述的一种六自由度机械臂隔离开关带电清扫装置,其特征在于,第四电机(24)为行星减速电机。
9.根据权利要求1所述的一种六自由度机械臂隔离开关带电清扫装置,其特征在于,底座(1)为绝缘材质。
10.根据权利要求1所述的一种六自由度机械臂隔离开关带电清扫装置,其特征在于,在悬臂(14)上设置有摄像头。
技术总结本发明提供了一种六自由度机械臂隔离开关带电清扫装置,属于电力运维技术领域。装置构造包括:在底座上转动连接有蜗轮,蜗杆与蜗轮相互啮合,驱动臂底座与蜗轮保持固定,在驱动臂底座上转动连接有驱动大臂,传动杆的一端转动连接在驱动大臂上,另一端与中臂连杆的下端转动连接,旋转臂支座的前侧转动连接在驱动大臂上,后侧与中臂连杆的上端转动连接,在旋转臂支座上固定连接有安装座,在安装座上转动连接有外轴,在外轴上转动连接有悬臂,在悬臂上转动连接有喷头。本发明克服了现有隔离开关带电清扫装置安装复杂的缺陷,解决了其通用性差、功能单一等问题,可有效扩大带电清扫作业的应用范围,适用于多种规格的隔离开关的带电清扫。技术研发人员:朱金康,马正和,杨利民,雷小龙,黄经纬,常海龙,张立成,肖瑶,买买提·艾尼,李江华,周棚,牟博辉,马文受保护的技术使用者:国网新疆电力有限公司超高压分公司技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240725/143688.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表