基于压电叠堆驱动的管道爬行机器人
- 国知局
- 2024-08-05 13:07:29
本技术具体涉及一种基于压电叠堆驱动的管道爬行机器人。
背景技术:
1、管道作为运输载体,在人类生产生活中发挥着巨大作用,但管道必须定期进行专业检查维护,保证工作条件的稳定。除了传统的大型管道,工业领域都存在许多的细小管道,如冷凝管、煤气管道等管道结构,这些管道结构相对复杂,管径更小,在这些微小管道内进行管内工作任务面临很大的挑战。
2、因此,对于能够在微小管道内稳定运动、灵活操纵且可以安装执行功能模块以进行小管径管道内微操任务的微型管道机器人需求日益增加。压电惯性驱动结构简单、控制方便,在管道机器人领域的应用广泛。在过去的研究中,多采用惯性冲击驱动模式,但因为惯性冲击驱动结构的局限性,使得管道机器人难以在驱动主体上添加执行机构,还限制了管道机器人的负载能力,惯性粘滑驱动的管道机器人运动平稳,同样可以满足管道机器人小型化大行程高精度的要求,结构上允许其添加管内功能模块,但目前存在的惯性粘滑驱动压电管道机器人结构尺寸无法适应微小管径工作需要,且普遍存在快速变形驱动阶段产生的滑动摩擦阻力造成驱动器产生位移回退等问题。
3、而压电陶瓷材料作为一种新型功能材料具有体积小、结构简单、质量轻、位移分辨率及频响高,易于控制等优点,针对微型管道机器人压电元件驱动是一种较好的方式。如何利用压电元件去设计管道爬行机器人是一个亟待解决的问题。
技术实现思路
1、针对现有技术存在的不足,本实用新型的目的在于提供一种基于压电叠堆驱动的管道爬行机器人。
2、为实现上述目的,本实用新型提供了如下技术方案:
3、一种基于压电叠堆驱动的管道爬行机器人,其包括:
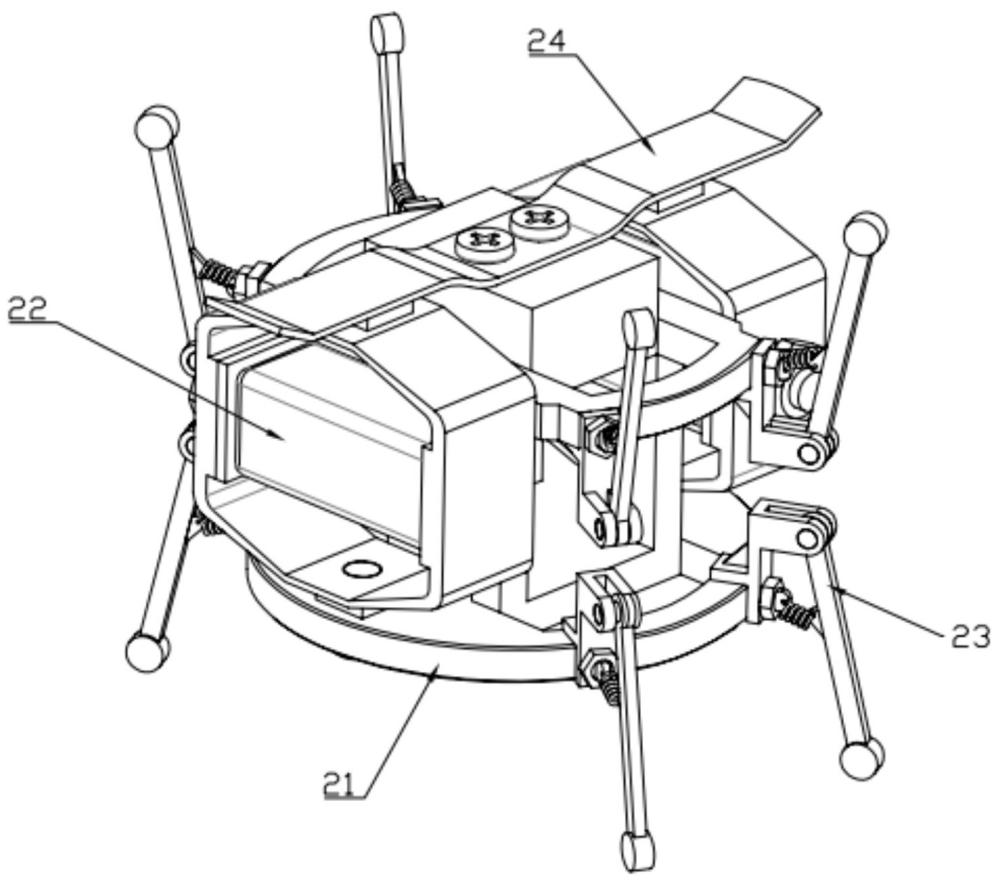
4、负载盘,其具有一圆形底板及设置在圆形底板中心的支撑体;
5、至少两组压电叠堆,设置在所述支撑体的两侧,其由固定座固定,且所述固定座的底部与圆形底板固定连接;
6、弹性驱动足,固定设置在支撑体上端,且其两端向外侧延伸,置于固定座的上侧,可由固定座放大压电叠堆的形变,进而带动其产生形变;
7、若干弹性支撑足,周向设置在负载盘外侧,且分成至少两组,且两组弹性支撑足非设置在同一平面上。
8、压电叠堆由若干压电陶瓷片堆叠形成,且固定设置在固定座的中空结构内。
9、所述中空结构的一端设有定位槽,其另一端设有安装凸台,且所述安装凸台处设有锁紧垫片。
10、所述弹性支撑足包括固定基座、可转动设置在固定基座上的支撑足及设置在支撑足与固定基座之间的弹性件。
11、所述支撑足的一端设置为摩擦球。
12、所述弹性件为弹簧。
13、所述支撑体为框架结构。
14、本实用新型的有益效果:本申请通过设置两个压电叠堆,并利用固定座将压电叠堆的形变放大,带动弹性驱动足,使得弹性驱动足施加给管道的压力会使主体有一个方向的推力,而当推力大于弹性支撑足与管道之间的摩擦力时,该管道爬行机器人就会向推力的方向移动,可以很好的将压电叠堆的产生的形变力作为动力使用,且不会因为推力的消失而后退。
技术特征:1.一种基于压电叠堆驱动的管道爬行机器人,其特征在于:其包括:
2.根据权利要求1所述的基于压电叠堆驱动的管道爬行机器人,其特征在于:压电叠堆由若干压电陶瓷片堆叠形成,且固定设置在固定座的中空结构内。
3.根据权利要求2所述的基于压电叠堆驱动的管道爬行机器人,其特征在于:所述中空结构的一端设有定位槽,其另一端设有安装凸台,且所述安装凸台处设有锁紧垫片。
4.根据权利要求1或2或3所述的基于压电叠堆驱动的管道爬行机器人,其特征在于:所述弹性支撑足包括固定基座、可转动设置在固定基座上的支撑足及设置在支撑足与固定基座之间的弹性件。
5.根据权利要求4所述的基于压电叠堆驱动的管道爬行机器人,其特征在于:所述支撑足的一端设置为摩擦球。
6.根据权利要求4所述的基于压电叠堆驱动的管道爬行机器人,其特征在于:所述弹性件为弹簧。
7.根据权利要求1所述的基于压电叠堆驱动的管道爬行机器人,其特征在于:所述支撑体为框架结构。
技术总结一种基于压电叠堆驱动的管道爬行机器人,其包括:负载盘,其具有一圆形底板及设置在圆形底板中心的支撑体;至少两组压电叠堆,设置在所述支撑体的两侧,其由固定座固定,且所述固定座的底部与圆形底板固定连接;弹性驱动足,固定设置在支撑体上端,且其两端向外侧延伸,置于固定座的上侧,可由固定座放大压电叠堆的形变,进而带动其产生形变;若干弹性支撑足,周向设置设置在负载盘外侧,且分成至少两组,且两组弹性支撑足非设置在同一平面上。本申请通过设置两个压电叠堆,利用固定座将压电叠堆的形变放大,带动弹性驱动足动作,使得弹性驱动足施加给管道的压力会使主体有一个方向的推力,而当推力大于弹性支撑足与管道之间的摩擦力时,该管道爬行机器人就会向推力的方向移动。技术研发人员:郭南,朱荷蕾,李晨鹏,祝庆靖,徐墨子,蒋易瑾,刘诗盈受保护的技术使用者:嘉兴学院技术研发日:20231221技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240725/265949.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表