一种煤矿井下钻孔内窥蠕虫机器人系统及控制方法
- 国知局
- 2024-07-27 10:50:45
本发明属于井下钻孔成像,尤其涉及一种煤矿井下钻孔内窥蠕虫机器人系统及控制方法。
背景技术:
1、传统的井下钻孔成像仪,需要通过钻杆或电缆将成像仪下放到钻孔中,这样就会受到钻孔直径、孔壁状况等限制,无法完整展现整个钻孔内部结构,局部区域可能无法得到有效成像。传统的井下钻孔成像仪设备和数据处理设备成本较高,使用和维护成本也较昂贵,并且部分传统成像仪无法实时传输数据,无法及时获取钻孔情况,影响工程决策的实时性和准确性。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了一种煤矿井下钻孔内窥蠕虫机器人系统及控制方法。
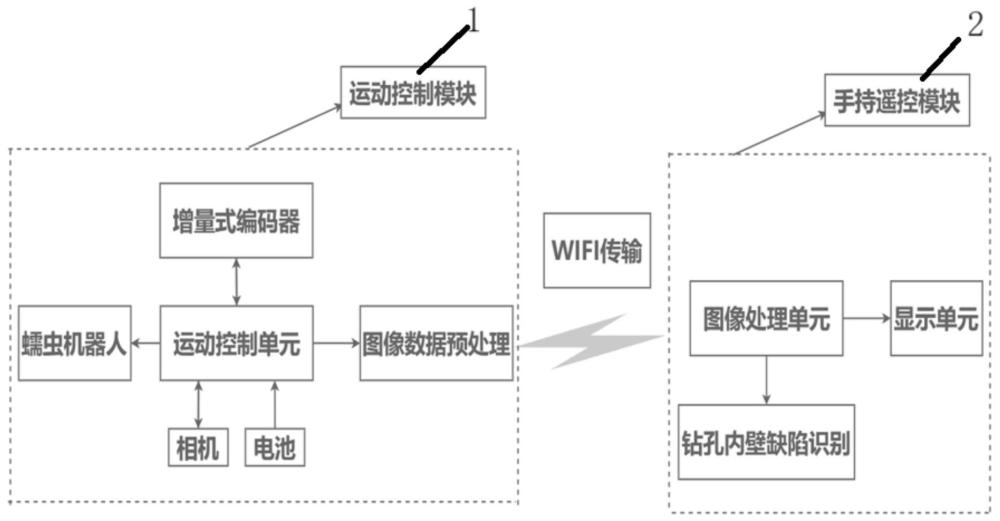
2、所述技术方案如下:一种煤矿井下钻孔内窥蠕虫机器人系统,该系统包括:运动控制模块和手持遥控模块;
3、所述运动控制模块通过集成的运动控制单元控制蠕虫机器人搭载的相机每移动一次拍摄一张照片,获取多帧图像数据,对所述多帧图像数据进行预处理并保存,同时,通过增量式编码器获得机器人移动中当前的深度;将预处理后的多帧图像数据和蠕虫机器人移动中当前的深度通过wifi传输到井下的手持遥控模块;
4、所述手持遥控模块将接收到的预处理后多帧图像数据通过软件中的图像处理单元将按次序逐帧拼接,经过深度学习图像处理后,检测和识别煤矿井下钻孔内壁是否有裂缝及裂缝的宽度和深度;以及通过手持遥控模块集成的显示单元进行实时显示煤矿井下钻孔内壁的状况和蠕虫机器人前进的深度。
5、进一步,所述运动控制模块包括:蠕虫机器人、增量式编码器、运动控制单元;蠕虫机器人采用伸缩电磁铁提供前进后退动力,增量式编码器用于采集蠕虫机器人前进的深度,运动控制单元负责控制蠕虫机器人的移动,并通过wifi实现煤矿井下钻孔与手持遥控模块的无线数据传输。
6、进一步,所述手持遥控模块包括:
7、图像处理单元,用于处理运动控制单元采集到的图像信息,显示单元实时显示井下钻孔内壁的状况。
8、进一步,所述运动控制模块的硬件进一步包括:第一电磁铁和第二电磁铁以及电池组成的后臂;
9、第四电磁铁、第五电磁铁、运动控制板和鱼眼摄像头组成的前臂;
10、后臂与前臂之间通过第三电磁铁和两个万向节连接,以适应不同曲度的管道。
11、进一步,所述运动控制模块的调控方法包括:
12、s1:电池组给运动控制板供电,与井下的手持遥控模块建立无线通信,第一电磁铁、第二电磁铁、第三电磁铁、第四电磁铁、第五电磁铁均处于收缩状态;
13、s2:手持遥控模块下发指令通过运动控制板控制第一电磁铁和第二电磁铁推出;
14、s3:手持遥控模块下发指令通过运动控制板控制第三电磁铁推出,前臂前进;
15、s4:手持遥控模块下发指令通过运动控制板控制第四电磁铁和第五电磁铁推出;
16、s5:手持遥控模块下发指令通过运动控制板控制第一电磁铁和第二电磁铁收缩;
17、s6:手持遥控模块下发指令通过运动控制板控制第三电磁铁收缩,后臂前进。
18、本发明的另一目的在于提供一种煤矿井下钻孔内窥蠕虫机器人系统的控制方法,包括:
19、s101,通过运动控制模块集成的运动控制单元利用不同的运动模式控制蠕虫机器人搭载的相机每移动一次拍摄一张照片,获取多帧图像数据,对所述多帧图像数据进行预处理并保存,同时,通过增量式编码器获得机器人移动中当前的深度;将预处理后的多帧图像数据和蠕虫机器人移动中当前的深度通过wifi传输到井下的手持遥控模块;
20、s102,手持遥控模块将接收到的预处理后多帧图像数据通过软件中的图像处理单元将按次序逐帧拼接,经过深度学习图像处理后,检测和识别煤矿井下钻孔内壁是否有裂缝及裂缝的宽度和深度;
21、s103,手持遥控模块通过集成的显示单元进行实时显示煤矿井下钻孔内壁的状况和蠕虫机器人前进的深度。
22、在步骤s101中,在蠕虫机器人的运动过程中增量式编码器连接有计米轮,轮的周长已知,编码器旋转一周产生的脉冲数已知,通过计数脉冲确定机器人当前的深度;
23、运动控制模块将鱼眼摄像头拍摄的照片调整为图像处理单元中图像数据所需的大小,确保所有输入图像的尺寸一致,并且通过高斯滤波、中值滤波去除图像中的噪声。
24、运动模式包括自动模式和手动模式,当选择为自动模式时,运动控制模块通过驱动电磁铁的伸缩来控制机器人前进到钻孔尽头,当机器人前进到钻孔尽头后,再驱动电磁铁让机器人后退到钻孔的初始位置结束自动模式;当选择为手动模式时,手持遥控模块手动控制机器人的前进和后退;
25、运动控制单元采用小型锂电成供电,控制机器人的移动,用于井下钻孔内窥。
26、在步骤s102中,所述手持遥控模块接收到的预处理后多帧图像数据通过软件中的图像处理单元对图像进行特征提取,并进行特征匹配以找到相邻图像之间的对应关系;并且使用ransac算法对所有图像进行全局优化,以最小化拼接误差,然后将所有图像通过叠加和融合的方式按次序逐帧拼接。
27、检测和识别煤矿井下钻孔内壁是否有裂缝及裂缝的宽度和深度包括:通过卷积神经网络,利用卷积层、池化层和全连接层组件提取图像中的特征,检测和识别煤矿井下钻孔内壁是否有裂缝及裂缝的宽度和深度。
28、结合上述的所有技术方案,本发明所具备的有益效果为:本发明提出的煤矿井下钻孔内窥蠕虫机器人系统,旨在解决传统煤矿井下钻孔探测难度大、安全风险高等问题。该系统包括一台蠕虫机器人、增量式编码器、运动控制单元、图像处理单元和显示单元。蠕虫机器人采用伸缩电磁铁提供前进后退动力,增量式编码器用于采集机器人前进的深度,运动控制单元负责控制机器人的移动,并通过wifi实现煤矿井下钻孔与手持遥控模块的无线数据传输,图像处理单元处理运动控制单元采集到的图像信息,显示单元实时显示井下钻孔内壁的状况。
29、机器人每前进一步摄像头就会拍摄一张图片并且传输到图像处理单元,图像处理单元将拍摄到的所有照片拼接起来,进而能显示并检测整个钻孔内壁的情况。查看井下钻孔内壁是否有裂缝和裂缝的宽度。该系统能够灵活适应复杂的煤矿井下环境,实现对煤矿井下钻孔内部结构的实时监测和分析,提高了煤矿勘探和安全管理的效率和精度,适用于复杂多变的煤矿井下环境,具有广泛的应用前景。
技术特征:1.一种煤矿井下钻孔内窥蠕虫机器人系统,其特征在于,该系统包括:运动控制模块(1)和手持遥控模块(2);
2.根据权利要求1所述的煤矿井下钻孔内窥蠕虫机器人系统,其特征在于,所述运动控制模块(1)包括:蠕虫机器人、增量式编码器、运动控制单元;蠕虫机器人采用伸缩电磁铁提供前进后退动力,增量式编码器用于采集蠕虫机器人前进的深度,运动控制单元负责控制蠕虫机器人的移动,并通过wifi实现煤矿井下钻孔与手持遥控模块(2)的无线数据传输。
3.根据权利要求1所述的煤矿井下钻孔内窥蠕虫机器人系统,其特征在于,所述手持遥控模块(2)包括:
4.根据权利要求1所述的煤矿井下钻孔内窥蠕虫机器人系统,其特征在于,所述运动控制模块(1)的硬件进一步包括:第一电磁铁(3)和第二电磁铁(4)以及电池组(11)成的后臂;
5.根据权利要求4所述的煤矿井下钻孔内窥蠕虫机器人系统,其特征在于,所述运动控制模块(1)的调控方法包括:
6.一种煤矿井下钻孔内窥蠕虫机器人系统的控制方法,其特征在于,该控制方法用于对权利要求1-5任意一项所述的煤矿井下钻孔内窥蠕虫机器人系统进行控制,该控制方法包括:
7.根据权利要求6所述的煤矿井下钻孔内窥蠕虫机器人系统的控制方法,其特征在于,在步骤s101中,在蠕虫机器人的运动过程中增量式编码器连接有计米轮,轮的周长已知,编码器旋转一周产生的脉冲数已知,通过计数脉冲确定机器人当前的深度;
8.根据权利要求6所述的煤矿井下钻孔内窥蠕虫机器人系统的控制方法,其特征在于,在步骤s101中,运动模式包括自动模式和手动模式,当选择为自动模式时,运动控制模块(1)通过驱动电磁铁的伸缩来控制机器人前进到钻孔尽头,当机器人前进到钻孔尽头后,再驱动电磁铁让机器人后退到钻孔的初始位置结束自动模式;当选择为手动模式时,手持遥控模块(2)手动控制机器人的前进和后退;
9.根据权利要求6所述的煤矿井下钻孔内窥蠕虫机器人系统的控制方法,其特征在于,在步骤s102中,所述手持遥控模块(2)接收到的预处理后多帧图像数据通过软件中的图像处理单元对图像进行特征提取,并进行特征匹配以找到相邻图像之间的对应关系;并且使用ransac算法对所有图像进行全局优化,以最小化拼接误差,然后将所有图像通过叠加和融合的方式按次序逐帧拼接。
10.根据权利要求6所述的煤矿井下钻孔内窥蠕虫机器人系统的控制方法,其特征在于,在步骤s102中,检测和识别煤矿井下钻孔内壁是否有裂缝及裂缝的宽度和深度包括:通过卷积神经网络,利用卷积层、池化层和全连接层组件提取图像中的特征,检测和识别煤矿井下钻孔内壁是否有裂缝及裂缝的宽度和深度。
技术总结本发明属于井下钻孔成像技术领域,公开了一种煤矿井下钻孔内窥蠕虫机器人系统及控制方法。该方法通过运动控制模块集成的运动控制单元的运动模式控制机器人每移动一次相机拍摄一张照片并且保存到SD卡中,增量式编码器也会获得机器人当前的深度,并且将获得到的图像数据和深度经图像数据预处理后通过WIFI传输到井下的手持遥控模块;手持遥控模块接收到的照片通过集成的图像处理单元将按次序逐帧拼接,经过深度学习图像处理算法后,检测和识别煤矿井下钻孔内壁是否有裂缝及裂缝的宽度和深度;显示单元进行实时显示煤矿井下钻孔内壁的状况和蠕虫机器人前进的深度。本发明提高了煤矿勘探和安全管理的效率和精度。技术研发人员:郭华,朱秀伟,任道宽受保护的技术使用者:山东科技大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240726/116001.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表