用于电动旋挖钻机的永磁同步电机自适应控制系统与方法
- 国知局
- 2024-07-27 10:53:37
本发明涉及电机控制,更具体地说它涉及一种用于电动旋挖钻机的永磁同步电机自适应控制系统与方法。
背景技术:
1、随着我国基础设施建设的飞速发展,钻孔灌注桩因具有成本低、适应性强、施工简单的特点,在基础桩施工中的应用越来越广泛。在当前能源危机、减少排放的大背景下,旋挖钻机的节能、减排技术也得到了高度的关注,因此电驱动取代常规的柴油机驱动成为热点研究领域,电动化、智能化也成为了旋挖钻机发展的必然趋势。
2、在现有技术中,旋挖钻机通常采用柴油发动机驱动。但是,随着国家节能减排的大背景下,相关领域的企业和技术人员开始着重探索如何将柴油发动机驱动的形式改为电机驱动的形式。由于旋挖钻机在工作过程中会面临负载波动变化等问题,因此电驱动系统的设计需要紧密结合旋挖钻机的实际结构特点和施工特点。
3、但是,现有的电动旋挖钻机电机控制存在电机输出转矩无法满足负荷变化需求,导致电机效率差、旋挖钻机各工作部件均采用液压驱动,没有合适的控制策略提高电液复合系统的能效、没有专门用于旋挖钻机工作条件下的电机自适应控制算法以及旋挖钻机的电机控制研究尚未成型,有待完善,因此无法进行直接且高效的应用,有待改进。
技术实现思路
1、有鉴于此,本技术的第一个目的在于提供一种用于电动旋挖钻机的永磁同步电机自适应控制系统,以实现优化完善电机控制技术从而提升电机控制运行能效与钻孔效率的目的。其具体方案如下:
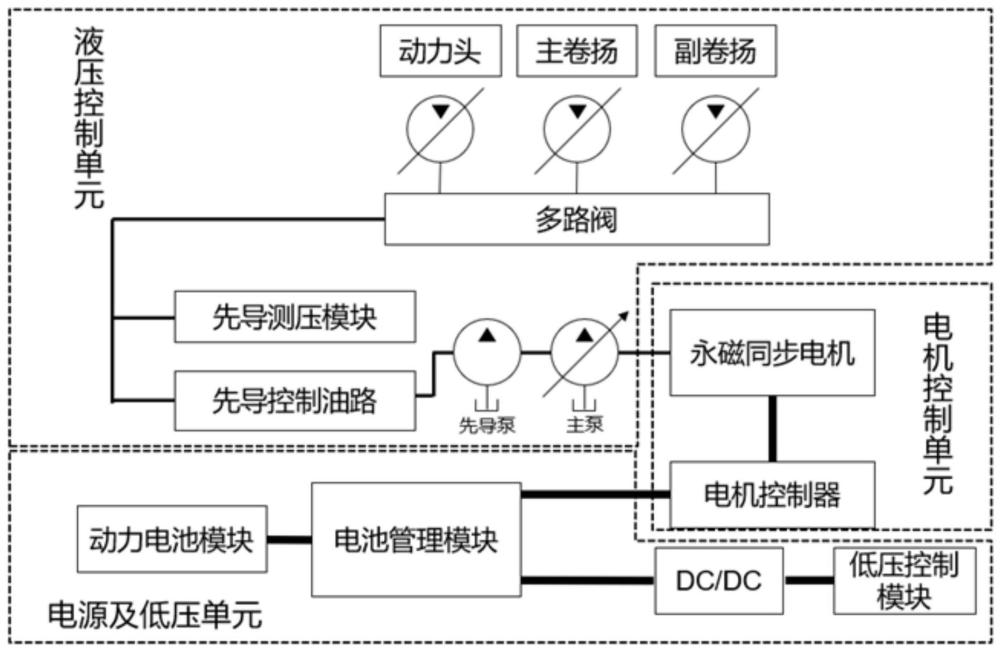
2、一种用于电动旋挖钻机的永磁同步电机自适应控制系统,由电源及低压单元、电机控制单元和液压控制单元组成;其中:
3、所述电源及低压单元包括用于供电的动力电池模块、用于检测所述动力电池模块的电池参数信息的电池管理模块、用于将高压转换为低压供电的dc/dc模块以及与所述dc/dc模块电连接并处理逻辑算法的低压控制模块;
4、所述电机控制单元包括永磁同步电机和用于驱动所述永磁同步电机运行的电机控制器,所述电机控制器与所述电池管理模块电连接;
5、所述液压控制单元包括用于提供高压液体流入液压系统被的主泵、为所述主泵提供压力和流量以操纵主泵运行的先导泵、用于管理和控制先导油路的先导控制油路、用于控制液压系统中不同液压元件操作的多路阀模块以及马达模块。
6、优选地:所述动力电池模块包括多个单体电池;所述电池管理模块用于收集电池电压、电流、温度、转速、同步电感、相电阻、扭矩、磁通和转动惯量;所述低压控制模块包括控制器以及电流、电压和温度的采样电路。
7、优选地:所述永磁同步电机为三相永磁同步电机,所述电机控制器由功率控制板和绝缘栅双极晶体管组成;所述液压控制单元包括用于测量和监测先导油路压力的先导测压模块,所述马达模块包括动力头、主卷扬和副卷扬。
8、本发明的第二个目的在于提供一种用于电动旋挖钻机的永磁同步电机自适应控制方法,包括如下步骤:
9、s1、电源及低压单元输出三相交流电;
10、s2、建立永磁同步电机数学模型,将三相交流坐标系(a-b-c)转化到两相旋转垂直坐标系(d-q);
11、s3、构造闭环控制系统,根据两相旋转垂直坐标系下的电压方程和自适应鲁棒控制算法,闭环控制系统获取三个闭环;
12、s4、采用恒定磁场强度电流控制方法,令磁场强度电流id=0;
13、s5、计算转速反馈信号,利用编码器获得永磁同步电机当前角度值,计算出机械角度增量值,再以设定频率计算永磁同步电机的转速,作为转速反馈信号输入转速环;
14、s6、建立速度误差状态方程,根据给定转速和反馈转速之间的误差状态,建立转速误差状态方程,再利用自适应转速环控制器,获得输出转矩控制电流iq并计算其与参考值iq0的误差;
15、s7、将误差输入电流调节器计算获得输出控制电压uduq;
16、s8、进行空间矢量脉宽调制编码,利用输出控制电压uduq进行坐标变换并输入空间矢量脉宽调制模块,得到三相桥控制编码值,按照编码值驱动永磁同步电机;
17、s9、永磁同步电机驱动旋挖钻机主泵工作,主泵油路经过先导控制油路和多路阀带动动力头、主卷扬以及副卷扬工作。
18、优选地:所述步骤s1包括:
19、s1-1、采用串并联方式连接,将单体电池组成动力电池组模块,提供整车高压电源;
20、s1-2、基于所述电池组模块,构件分布式电池管理系统,所述分布式电池管理系统包括多个单体电池和与相应的单体电池连接的电池信息采集板;
21、s1-3、电池信息采集板采集每块单体电池的参数信息,并通过总线与分布式电池管理系统的中央控制器连接;
22、s1-4、中央控制器通过总线接口与其它模块进行通信,同时为电池均衡控制的输入端提供控制命令。
23、优选地:所述电池信息采集板负责向中央控制器发送采集的每块单体电池的参数信息,且具体为经中央控制器向总线发出相应的电池信息采集板序列号的请求信息,每个电池信息采集板均接受请求信息并与自身序列号对比,并在相同时通过总线发出采集的每块单体电池的参数信息,若不同则忽略请求;所述步骤s3具体包括:
24、s3-1、获取自适应转速误差闭环、磁场强度电流id闭环和转矩控制电流iq闭环,且以磁场强度电流id闭环和转矩控制电流iq闭环为内环,自适应转速误差环闭环为外环。
25、优选地:所述步骤s2包括:
26、s2-1、根据坐标变换,将永磁同步电机电压与电流的控制参数转换到两相旋转坐标系下,得到其两相电压uduq方程与机械运动方程为:
27、
28、
29、
30、其中,ud为三相定子瞬时电压在d轴上的分量,ls为永磁同步电机的同步电感,id为三相定子瞬时电流在d轴上的分量,pn为极对数,ωm为永磁同步电机机械转速,iq为三相定子瞬时电流在q轴上的分量,r代表永磁同步电机的相电阻,uq为三相定子瞬时电压在q轴上的分量,ψf代表永磁同步电机的磁通,j为转动惯量,t为永磁同步电机产生的扭矩。
31、优选地:所述步骤s4具体包括:
32、s4-1、采用磁场强度电流id=0的控制方法,将s2-1简化为:
33、
34、
35、其中,ω为实际转速,tl为负载转矩。
36、优选地:所述步骤s6具体包括:
37、s6-1、定义转差及转差的导数作为变结构控制的两个状态变量e1e2,得到额定转速与额定q轴电流的传递函数:
38、e1=ω*-ω
39、
40、其中,ω*为目标转速,ω为实际转速;
41、s6-2、设计扰动自适应律对e1进行补偿,减小扰动e1对系统的输出性能及稳定性的影响,且自适应律设计为:
42、d(t)=-kde1
43、定义优化模型为:
44、
45、其中,kd为扰动自适应律的控制增益;
46、s6-3、将e1e2带入s4-1中,得到状态微分
47、
48、
49、定义控制器积分参数将上式简化为:
50、
51、
52、s6-4、构造自适应滑模面函数s:
53、s=ce1+e2
54、再对s进行求导,获得:
55、
56、计算e2和u的状态,获得动态系统的变化率;
57、s6-5、采用自定义鲁棒趋近律的控制方法削减系统的颤振,增强系统鲁棒性,求解控制器函数:
58、
59、其中,ε为符号函数系数,并获得控制器的函数为:
60、
61、其中,e(t)=ω*-ω,且为转差;
62、s6-6、获取输出iq与输出转差e之间的关系:
63、
64、最后依据微分项减小系统稳态误差的同时抑制变结构控制引起的颤振。
65、优选地:所述步骤s9具体包括:
66、s9-1、永磁同步电机通过机械能驱动液压系统恒压变量柱塞泵,将机械能转化为液压能;
67、s9-2、阀组控制恒压变量柱塞泵的方向、压力、流量,将液压能传输到动力头、主卷扬和副卷扬中;
68、s9-3、优化电液复合系统的能效利用率,控制能效利用率为:
69、
70、其中,η为能效利用率,fl为负载力,ηe为电机效率,fh为液压输出力,ηh为液压效率。
71、通过以上方案可知,本技术提供了用于电动旋挖钻机的永磁同步电机自适应控制系统与方法,该用于电动旋挖钻机的永磁同步电机自适应控制系统通过电源及低压单元、电机控制单元以及液压控制单元实现电池管理并监控电池状态信息,针对电液复合驱动系统驱动力分配值进行优化,在能效利用率最大化的基础上优化分配动力源的驱动力;该用于电动旋挖钻机的永磁同步电机自适应控制方法具有自适应负载转矩变化,并对应调整永磁同步电机转速与转矩的效果,降低钻进过程中的能耗并提高工作效率,从而实现显著低碳排放能力。
本文地址:https://www.jishuxx.com/zhuanli/20240726/116259.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表