盾构机洞内拆解控制优化方法、设备和介质与流程
- 国知局
- 2024-07-27 10:55:35
本技术涉及盾构机控制,尤其涉及一种盾构机洞内拆解控制优化方法、设备和介质。
背景技术:
1、盾构机作为重要的隧道掘进设备,在任务完成后需要拆解以进行运输或维修。其中,拆解过程所涉及的大型组件,通常使用液压举升设备操作。
2、具体地,液压举升设备的液压多级缸与电磁换向阀、比例流量阀结合,实现了大型拆解组件的稳定举升和移动,有效减少了拆解过程中的安全问题和复杂性。
3、然而,盾构机组件拆解需要高精准控制,目前研究主要集中在简单结构或小型设备的液压同步控制上,复杂的盾构机拆解任务仍面临挑战。
技术实现思路
1、本技术提供一种盾构机洞内拆解控制优化方法、设备和介质,用以解决盾构机拆解任务中控制器参数调整困难的问题。
2、第一方面,本技术提供一种盾构机洞内拆解控制优化方法,应用于计算机设备,所述方法包括:
3、响应于用户的控制器优化操作,随机初始化多组控制参数,每组控制参数中包括一个控制指令以及一组控制器参数,所述控制器参数中包括比例增益,积分时间以及微分时间;
4、针对每组控制参数,将所述控制参数输入液压控制模型中进行液压举升设备对盾构机的起降仿真,得到仿真样本,所述仿真样本中包括基于所述控制参数中的控制指令确定的输入值,所述控制参数中的控制器参数以及实际仿真得到的输出值,所述液压控制模型为对盾构机的液压举升设备的控制系统进行仿真模拟的数学模型;
5、基于改进的萤火虫算法、仿真得到的多个仿真样本以及所述液压控制模型,确定最优控制器参数;
6、将所述最优控制器参数配置至用于拆解盾构机时的液压举升设备的控制器中。
7、在第一方面的一种可能设计中,所述基于改进的萤火虫算法、仿真得到的多个仿真样本以及所述液压控制模型,确定最优控制器参数,包括:
8、步骤(1),响应于用户的控制器优化操作,设置萤火虫算法的光强吸收系数γ、最大吸引度β0、步长因子α,以及最大迭代次数m,并将所述多个仿真样本的数量作为萤火虫数量n,每个萤火虫个体用于表示一个仿真样本中的一组控制器参数;
9、步骤(2),基于目标函数,每一个萤火虫对应的仿真样本中的输入值和输出值,计算每个萤火虫的亮度i;其中,所述目标函数为对仿真样本中的输入值和输出值的差值进行时间加权积分的函数;
10、步骤(3),分别计算任意两个萤火虫之间的相对吸引度,并根据每个萤火虫的亮度以及任意两个萤火虫之间的相对吸引度更新萤火虫的位置,得到多组新的控制器参数;
11、步骤(4),基于多个仿真样本中的输入值,将所述多组新的控制参数分别输入至所述液压控制模型中进行仿真,得到新的多个仿真样本,新的每个仿真样本中包括一个仿真样本中的输入值,更新后的一组控制器参数,和新的输出值;
12、步骤(5),基于所述新的多个仿真样本,重复步骤(2)至步骤(4)直至算法迭代次数达到所述最大迭代次数m或者所有萤火虫的总亮度变化小于预设阈值结束迭代,从最后一次迭代的多个萤火虫的亮度中选择出亮度最大的萤火虫个体,将所述萤火虫个体对应的控制器参数作为最优控制器参数。
13、在第一方面的一种可能设计中,所述基于多个仿真样本中的输入值,将所述多组新的控制参数分别输入至所述液压控制模型中进行仿真,得到新的多个仿真样本之后,所述方法还包括:
14、根据迭代次数以及步长迭代计算公式:对所述步长因子进行更新,得到更新后的步长因子;
15、其中,α(m+1)为在迭代次数为m+1时的步长因子,α(m)为在迭代次数为m时的步长因子,m为当前迭代次数。
16、在第一方面的一种可能设计中,所述分别计算任意两个萤火虫之间的相对吸引度,包括:
17、分别计算任意两个萤火虫之间的笛卡尔距离;
18、基于任意两个萤火虫之间的笛卡尔距离,采用:
19、计算任意两个萤火虫之间的相对吸引度;
20、其中,βn,n′(m)表示在迭代次数为m时,萤火虫个体n和萤火虫个体n′之间的相对吸引度,n表示萤火虫个体n的编号,n′表示萤火虫个体n′的编号,rn,n′(m)表示在迭代次数为m时,萤火虫个体n和萤火虫个体n′之间的笛卡尔距离。
21、在第一方面的一种可能设计中,所述根据每个萤火虫的亮度,以及任意两个萤火虫之间的相对吸引度更新萤火虫的位置,包括:
22、根据每个萤火虫的亮度以及任意两个萤火虫之间的相对吸引度,采用xn′(m+1)=xn′(m)+βn,n′(m)(xn(m)-xn′(m))+α(m+1)(rand-0.5),对所述每个萤火虫的位置进行更新;
23、其中,xn′(m+1)表示在迭代次数为m+1时,萤火虫个体n′的位置,xn′(m)表示在迭代次数为m时,萤火虫个体n′的位置,xn(m)表示在迭代次数为m时,萤火虫个体n的位置,rand为[0,1]上服从均匀分布的随机数。
24、在第一方面的一种可能设计中,所述盾构机的液压举升设备的控制系统中包括两个反馈控制路径,每个反馈控制路径中包括依次连接的pid控制器,集成放大器,比例流量阀,液压缸以及位移传感器;
25、所述液压控制模型中包括:
26、pid控制器的传递函数,集成放大器的传递函数,比例流量阀的传递函数,液压缸的传递函数以及位移传感器的传递函数。
27、在第一方面的一种可能设计中,所述将所述最优控制器参数配置至用于拆解盾构机时的液压举升设备的控制器中,包括:
28、将所述最优控制参数配置至所述用于拆解盾构机时的液压举升设备的控制系统中的pid控制器中。
29、第二方面,本技术提供一种盾构机洞内拆解控制优化方法,应用于液压举升设备的控制系统,所述方法包括:
30、响应于用户输入的控制指令,根据控制器参数将所述控制指令转换成电信号;
31、基于所述电信号控制液压举升设备的升起或者下降;
32、其中,所述控制器参数是根据液压控制模型和改进的萤火虫算法基于多个仿真样本确定出的最优控制器参数,所述控制器参数包括比例增益,积分时间以及微分时间,所述液压控制模型为对盾构机的液压举升设备的控制系统进行仿真模拟的数学模型,每个仿真样本中包括一个基于控制指令确定的输入值,一组控制器参数以及实际仿真得到的输出值。
33、第三方面,本技术提供一种计算机设备,包括:收发器,处理器,以及与所述处理器通信连接的存储器;
34、所述存储器存储计算机执行指令;
35、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面中任一项所述的盾构机洞内拆解控制优化方法。
36、第四方面,本技术提供一种液压举升设备的控制系统,包括:收发器,处理器,以及与所述处理器通信连接的存储器;
37、所述存储器存储计算机执行指令;
38、所述处理器执行所述存储器存储的计算机执行指令,以实现如第二方面中所述的盾构机洞内拆解控制优化方法。
39、第五方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一至第二方面中任一项所述的盾构机洞内拆解控制优化方法。
40、第六方面,本技术提供一种盾构机洞内拆解控制优化装置,所述装置包括:
41、处理模块,用于响应于用户的控制器优化操作,随机初始化多组控制参数,每组控制参数中包括一个控制指令以及一组控制器参数,所述控制器参数中包括比例增益,积分时间以及微分时间;
42、处理模块,还用于针对每组控制参数,将所述控制参数输入液压控制模型中进行液压举升设备对盾构机的起降仿真,得到仿真样本,所述仿真样本中包括基于所述控制参数中的控制指令确定的输入值,所述控制参数中的控制器参数以及实际仿真得到的输出值,所述液压控制模型为对盾构机的液压举升设备的控制系统进行仿真模拟的数学模型;
43、处理模块,还用于基于改进的萤火虫算法、仿真得到的多个仿真样本以及所述液压控制模型,确定最优控制器参数;
44、配置模块,用于将所述最优控制器参数配置至用于拆解盾构机时的液压举升设备的控制器中。
45、第七方面,本技术提供一种盾构机洞内拆解控制优化装置,所述装置包括:
46、响应模块,用于响应于用户输入的控制指令,根据控制器参数将所述控制指令转换成电信号;
47、控制模块,用于基于所述电信号控制液压举升设备的升起或者下降;
48、其中,所述控制器参数是根据液压控制模型和改进的萤火虫算法基于多个仿真样本确定出的最优控制器参数,所述控制器参数包括比例增益,积分时间以及微分时间,所述液压控制模型为对盾构机的液压举升设备的控制系统进行仿真模拟的数学模型,每个仿真样本中包括一个基于控制指令确定的输入值,一组控制器参数以及实际仿真得到的输出值。
49、第八方面,本技术提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如第一至第二方面中任一项所述的盾构机洞内拆解控制优化方法。
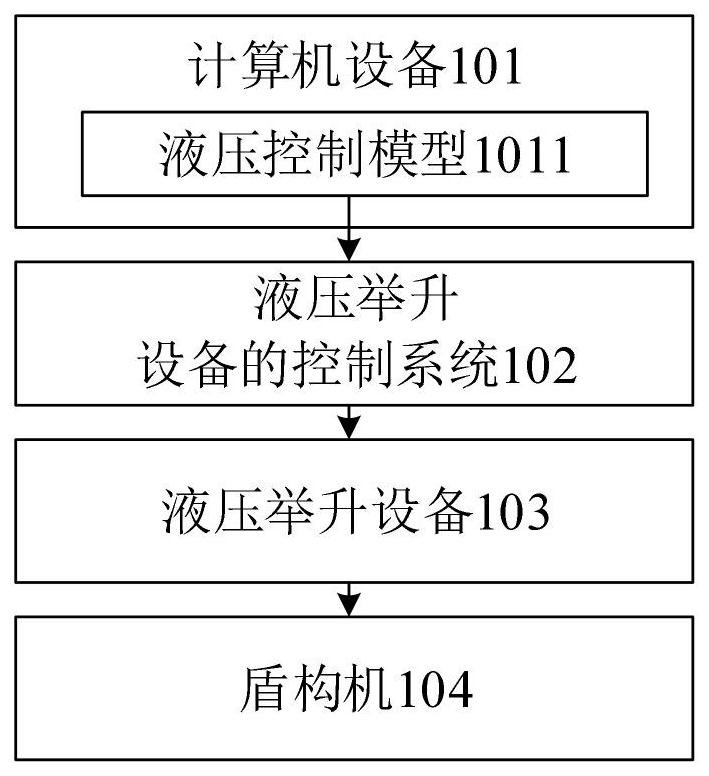
50、本技术提供的盾构机洞内拆解控制优化方法、设备和介质,涉及盾构机控制技术领域。在该方案中,包括计算机设备和液压举升设备的控制系统。具体的,计算机设备利用改进的萤火虫算法和仿真得到的多个仿真样本,结合液压控制模型确定最优控制器参数。液压举升设备的控制系统根据计算机设备确定的最优控制器参数以及用户输入的指令,实现液压举升设备的升降操作。该种方法优化了控制器参数的调整过程,有效提高了顶升过程的同步性和准确性,提升了液压举升设备控制系统操作的效率和安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240726/116545.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。