一种仿生三维软弹皮层微电极及其制备方法
- 国知局
- 2024-07-27 12:53:06
本发明属于生物医电,具体涉及一种仿生三维软弹皮层微电极及其制备方法。
背景技术:
1、微机电系统(mems)技术和柔性电子技术的融合,为高精度、高柔性脑科学研究工具的开发提供了重要基础。植入式柔性皮层微电极正是基于上述技术,其发展方向之一是如何提高电极与大脑皮层沟回之间的保形贴附性能,保证全部电极位点能够采集到稳定的脑电信号。然而,为了提高保形贴附能力,现有技术往往选择减小柔性聚合物薄膜衬底厚度或使用本征更加柔软的材料,如硅胶、水凝胶等,这对于保证衬底的机械强度和可靠性提出了新的挑战。
2、采用超薄聚合物、超弹性低模量衬底材料,网状或指状结构衬底设计,电极点引入三维微凸起结构等方法,在不同程度上存在一定问题:衬底减薄或网状镂空结构设计都会导致电极机械强度下降,操作或植入时容易因外力受损;超弹性低模量材料如硅胶,其mems加工兼容性差,微加工精度难以保证;电极点微凸起多采用在金属下层垫高聚合物的方式,缺乏弹性接触变形能力。因此,开发具有软弹性微凸台结构的皮层微电极,对于保证与脑组织保形贴附具有重要意义。
3、经过对现有技术的检索发现,guo z等人在journal of microelectromechanicalsystems,2018,27(6):1035-1040上撰文“apolyimide-based 3d ultrathin bioelectrodewith elastic sites for neural recording”,提出了一种具有类悬臂梁的翘曲电极点结构的三维超薄柔性电极,可实现与大脑皮层表面的共性接触,并提高了相邻电极点之间的相对灵活性,但该结构会随时间发生应力松弛,难以长期保持稳定的翘曲回弹能力。
4、yan z等人在proceedings of the national academy of sciences,2017,114(45):e9455-e9464上撰文“three-dimensional mesostructures as high-temperaturegrowth templates,electronic cellular scaffolds,and self-propelledmicrorobots”,通过预拉伸硅橡胶弹性基底,将背面局部沉积有钛/二氧化硅(ti/sio2),表面暴露有8个电极点的聚酰亚胺柔性电极贴附并恢复弹性基底原长,沉积有ti/sio2的区域和硅橡胶弹性基底通过缩合反应形成强化学键得以牢固粘结,电极因屈曲发生面外变形形成三维支架用于细胞再生。然而,一方面,三维支架末端容易与弹性基底发生脱粘,导致电极点无法有效保持三维屈曲结构,另一方面,电极三维屈曲结构机械强度不足,若承受较大压力变形后,难以恢复原貌,甚至三维支架支撑腿部位置会出现裂纹或破损。
5、在中国专利cn110367978b中公开了一种三维屈曲结构柔性神经电极及其制备工艺,通过力学引导形成三维屈曲结构,通过弹性基底提供的预拉伸形变,使所述二维平面结构电极在挤压作用下形成三维屈曲结构柔性神经电极,从而使所述金属电极点向上凸起,保证所述金属电极点与大脑皮层在弹性基底重力作用下挤压变形接触。在此基础上,本发明将进一步对电极触点进行改进,以提高接触时的机械强度。
技术实现思路
1、为了克服现有技术的不足,本发明提供了一种仿生三维软弹皮层微电极及其制备方法,环绕电极触点一圈带有爪形结构,弯折后可充分包裹并粘合软弹硅胶凸台,以此保证柔性聚合物薄膜微电极兼具较高的机械强度和保形接触能力;在制备时,首先基于mems技术在沉积有金属牺牲层的硅片上制作二维柔性微电极,然后浸没在盐酸溶液中,腐蚀金属牺牲层,使微电极从硅片上释放下来;然后用毛细玻璃管将微电极顶入具有圆柱形凹坑的模具中;接下来将液态软性硅胶逐一注入各个凹坑,完全填充所有凹坑;最后待液态软性硅胶完全凝固,抬起微电极,与模具分离。本发明有效解决了目前柔性聚合物薄膜微电极衬底厚度和保形贴附能力之间的平衡问题,为新型微创植入式脑机接口电极发展提供了重要参考。
2、本发明解决其技术问题所采用的技术方案包括如下步骤:
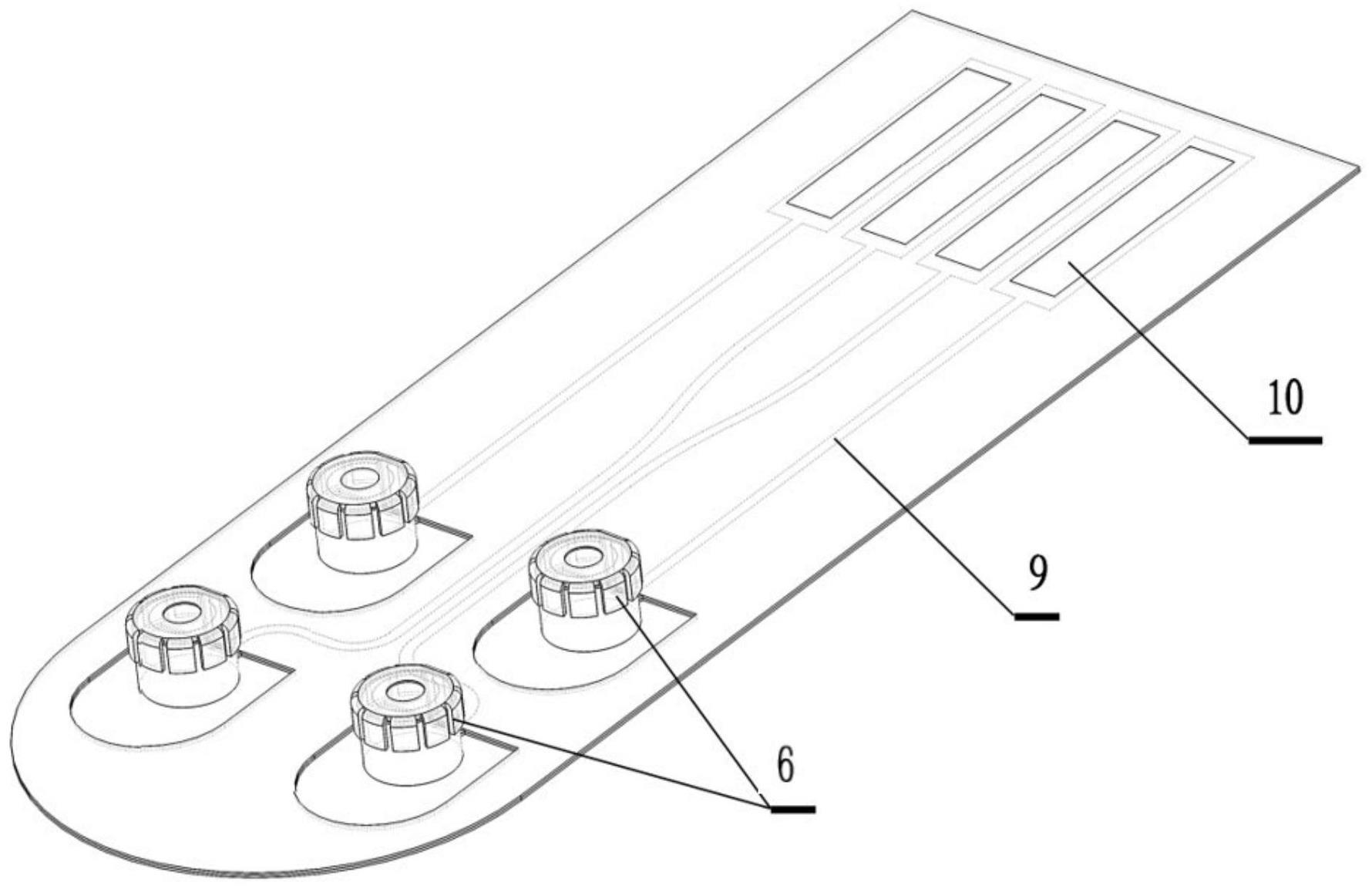
3、一种仿生三维软弹皮层微电极,包括电极模块、电极柔性衬底、电极金属导线和电极焊盘;所述电极模块包括电极臂结构、电极触点、电极爪形结构和软弹硅胶凸台;
4、所述电极焊盘设置在电极柔性衬底表面;所述电极金属导线设置在电极柔性衬底内部;多个电极模块与相同数量的电极焊盘通过电极金属导线一一对应连接;
5、所述电极爪形结构包括多个电极爪;所述电极触点设置在电极爪形结构的中心位置,电极触点上端面裸露;电极爪形结构的中心部分贴附在软弹硅胶凸台的顶部端面;多个电极爪均匀分布在电极触点周围,电极爪沿软弹硅胶凸台的顶部端面边缘弯折后贴附在软弹硅胶凸台的侧面周围;所述电极柔性衬底上开有多个孔,每个软弹硅胶凸台的下端面与电极柔性衬底平行并探入电极柔性衬底的一个孔中;
6、所述电极臂结构为带状,设置在任意两个电极爪之间并贴附在软弹硅胶凸台侧面;电极臂结构下端与电极金属导线一端电连接,电极臂结构上端与电极触点电连接。
7、优选地,所述电极爪在弯折处的两侧设置根部狭缝,根部狭缝的宽度为8-12微米,长度为30-50微米。
8、优选地,所述电极柔性衬底的材料为聚酰亚胺pi、聚对二甲苯parylene、聚对苯二甲酸乙二醇酯pet、su-8负性光刻胶中之一的聚合物薄膜材料,电极柔性衬底总厚度为10~50微米。
9、优选地,所述电极触点的金属层为金或铂或铱材料,通过溅射或热蒸发工艺方案沉积在电极柔性衬底上,电极触点的直径为100微米,金属层厚度为50~300纳米。
10、优选地,所述软弹硅胶凸台采用聚二甲基硅氧烷pdms或其他医用级硅橡胶软性材料。
11、优选地,所述电极臂结构臂长380微米,宽170微米;所述电极爪爪长160微米,宽度120微米。
12、一种仿生三维软弹皮层微电极制备方法,包括如下步骤:
13、步骤1:基于mems技术,在沉积有金属牺牲层的硅片上,制作基于聚合物薄膜材料的二维柔性微电极;将带有二维柔性微电极的硅片浸没在盐酸溶液中,金属牺牲层被腐蚀,二维柔性微电极释放并浮于液面,然后用去离子水清洗并放在热板上烘干;
14、所述二维柔性微电极包括电极柔性衬底、电极臂结构、电极触点、电极爪形结构、电极金属导线和电极焊盘;所述电极焊盘设置在电极柔性衬底表面;所述电极金属导线设置在电极柔性衬底内部;多个电极臂结构与相同数量的电极焊盘通过电极金属导线一一对应连接;
15、所述电极爪形结构包括多个电极爪;所述电极触点设置在电极爪形结构的中心位置,电极触点上端面裸露;多个电极爪均匀分布在电极触点周围;所述电极柔性衬底上开有多个孔,每个电极爪形结构位于电极柔性衬底的一个孔中;
16、所述电极臂结构为带状,设置在任意两个电极爪之间;电极臂结构一端与电极金属导线一端连接,电极臂结构另一端与电极触点连接;
17、步骤2:采用多个带有圆柱形凹坑的玻璃模具,用毛细玻璃管将每个二维柔性微电极的电极臂结构、电极触点和电极爪形结构顶入玻璃模具的圆柱形凹坑中,电极触点方向朝下与凹坑底部紧密贴附,使电极臂结构和电极爪形结构与凹坑侧壁紧密贴附,随后在高温烘箱中完成退火去应力处理;
18、步骤3:取出毛细玻璃管,将液态pdms软性硅胶逐一注入玻璃模具各个凹坑中,使其完全填充模具凹坑,并加热固化,形成软弹硅胶凸台;
19、步骤4:待液态pdms软性硅胶完全凝固,抬起二维柔性微电极,与玻璃模具分离,得到带有软弹硅胶凸台的仿生三维软弹皮层微电极。
20、优选地,所述步骤3中的软弹硅胶凸台为整片式含凸台软弹硅胶衬底,具体为:
21、在微电极的电极臂结构、电极触点及电极爪形结构与带有凹坑的模具紧密贴附后,使用旋胶机直接在二维柔性微电极背面整体均匀地旋涂设定厚度的液态软性硅胶,待硅胶固化后,形成填充模具凹坑的整片硅胶层,最后抬起二维柔性微电极,与模具分离,即得到带有整片式含凸台软弹硅胶衬底的仿生三维软弹皮层微电极。
22、优选地,所述硅片为4寸硅片,盐酸溶液为3%的盐酸溶液。
23、优选地,所述步骤1中,在热板上烘干时为40摄氏度加热10分钟。
24、本发明的有益效果如下:
25、1、本发明电极具有独特仿生特点的爪形结构,弯折后可以充分包裹软性硅胶并形成软弹微凸台;
26、2、在自身重力作用下,本发明的三维软弹皮层微电极可与大脑皮层沟回表面形成弹性变形接触关系,保证全部电极位点能够采集到稳定的脑电信号;
27、3、本发明可兼顾微电极的机械强度和保形贴附能力。
本文地址:https://www.jishuxx.com/zhuanli/20240726/123937.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表