一种风热机组控制方法
- 国知局
- 2024-07-27 13:47:19
本申请涉及风能热利用的领域,尤其是涉及一种风热机组控制方法。
背景技术:
1、由于风资源稳定性差,随着大规模风电并网,“弃风限电”是风电场始终要面对的消纳问题。为提高风资源效率,缓解“弃风限电”,风资源在非电领域的研究成为重要课题。风能热利用能源利用率高,对风资源稳定性要求低,不需要发电机组和相应配套设施,相对风电机组节省初投资,风热机组直接将机械能转化为热能,系统主要由风力机、增速箱、压缩机、偏航系统和变桨系统等部件构成,随着自然风带动风力机叶片旋转,经齿轮箱增速后,机械能驱动风力机和顶端机舱内的压缩机做功,压缩机经金属软管连接至地面换热器将机械能和低温热源热能一起传送至高温热源,实现制热或制冷。
2、但是关于压缩机制热和制冷的运行和风力机的运行之间的配合关系较弱,导致压缩机不能充分且合理的利用风力机的机械能。
技术实现思路
1、有鉴于此,本申请提供一种风热机组控制方法,解决了现有技术中的问题,提高风力机和热泵装置的相互配合关系,提高热泵装置对风力机机械能的利用效率。
2、本申请提供的一种风热机组控制方法采用如下的技术方案:
3、一种风热机组控制方法,风热机组包括风力机和热泵装置,风热机组控制方法包括:
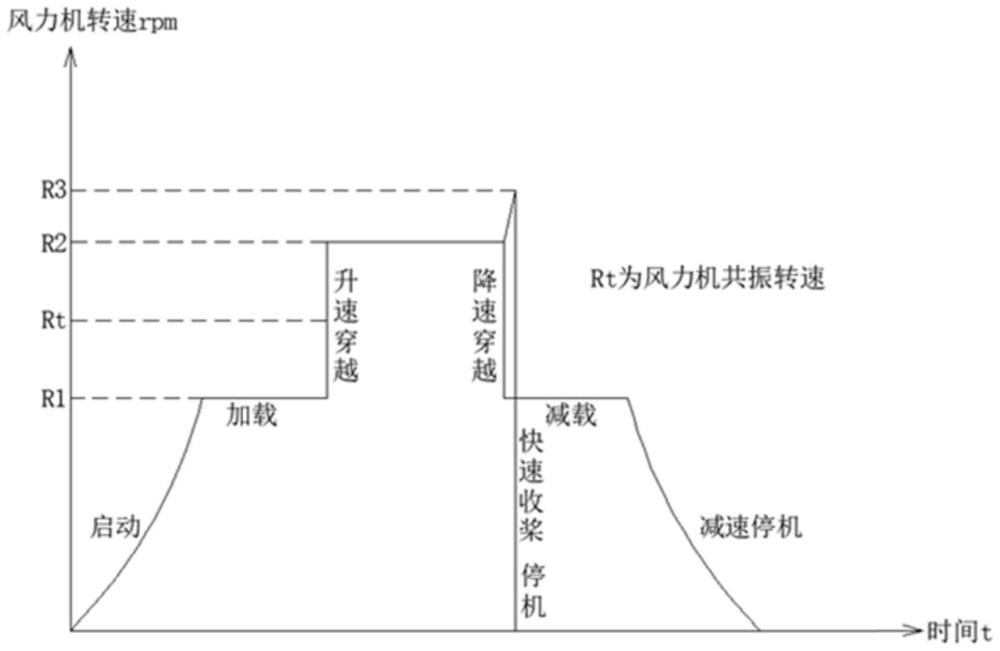
4、当环境风力大于风力机的切入风速,且所述风力机转速达到力矩切入转速r1时,启动变桨系统以使所述风力机的转速稳定在力矩切入转速r1,若桨距角大于第一预设值,增加热泵装置的压缩机载荷;
5、当所述风力机的转速稳定在力矩切入转速r1,且所述热泵装置的压缩机载荷达到调节上限时,若桨距角大于第二预设值,启动变桨系统使所述风力机的转速达到额定转速r2,通过变桨系统使风力机转速稳定在额定转速r2。
6、可选的,当风力机在额定转速r2运行时,所述热泵装置的压缩机载荷达到调节上限,若桨距角达到上限值,且风力机的实际转速大于最高转速r3,则风力机变桨停机。
7、可选的,当风力机在额定转速r2运行时,若桨距角等于零,且风力机的实际转速小于额定转速r2,启动变桨系统,使风力机的转速降低至力矩切入转速r1,变桨系统使风力机转速稳定在力矩切入转速r1。
8、可选的,当风力机在力矩切入转速r1运行时,若桨距角等于零,且风力机转速小于力矩切入转速r1,减小热泵装置的压缩机载荷;
9、热泵装置的压缩机载荷减小至调节下限时,且实际风速小于风力机的切入风速,风力机停机。
10、可选的,若桨距角大于第一预设值,增加热泵装置的压缩机载荷的步骤包括:
11、当桨距角大于第一预设值,启动增载电磁阀,压缩机滑阀动作,压缩机增载,当压缩机增载时间到达预设时间t1,压缩机滑阀位置小于上限,桨距角仍大于第一预设值,压缩机重复增载持续预设时间t1,直至压缩机滑阀到达上限位置时,停止增载。
12、可选的,若桨距角等于零,且风力机转速小于力矩切入转速r1,减小热泵装置的压缩机载荷的步骤包括:
13、若桨距角等于零,且风力机转速小于力矩切入转速r1,启动减载电磁阀,压缩机滑阀动作,压缩机减载,当压缩机减载时间到达预设时间t2,压缩机滑阀位置大于下限,桨距角为零,风力机实际转速仍小于力矩切入转速r1,压缩机重复减载持续预设时间t2,直至压缩机滑阀位置到达下限,停止减载。
14、可选的,所述风力机和热泵装置上均设有逻辑控制模块,风力机和热泵装置的逻辑控制模块的处理器通过modbus tcp协议交互数据,风力机和热泵装置的逻辑控制模块的plc通过交换机接入modbus tcp与上位机进行通讯,接收上位机指令,并将运行信息上传至上位机界面;所述风力机的逻辑控制模块实施读取风力机的实际转速,并且所述风力机的逻辑控制模块用于向热泵装置发送增加或减小热泵装置的压缩机载荷的控制指令,热泵装置的压缩机滑阀的实时位置通过热泵装置的逻辑控制模块经modbus tcp传输至风力机的逻辑控制模块。
15、可选的,所述热泵装置的逻辑控制模块接收风力机停机信号后,将压缩机滑阀位置调到下限,延时停止油泵。
16、综上所述,本申请包括以下有益技术效果:
17、本申请在应对不同风况时实现风力机与热泵装置的协调控制,通过变桨和压缩机载荷共同调节风力机,保证风力机在力矩切入转速r1和额定转速r2稳定运行,同时使得热泵装置的运行载荷匹配风力机提供的机械能,保证热泵装置的稳定运行和高效率制热以及对风力机机械能的利用效率。
技术特征:1.一种风热机组控制方法,风热机组包括风力机和热泵装置,其特征在于,风热机组控制方法包括:
2.根据权利要求1所述的风热机组控制方法,其特征在于,当风力机在额定转速r2运行时,所述热泵装置的压缩机载荷达到调节上限,若桨距角达到上限值,且风力机的实际转速大于最高转速r3,则风力机变桨停机。
3.根据权利要求1所述的风热机组控制方法,其特征在于,当风力机在额定转速r2运行时,若桨距角等于零,且风力机的实际转速小于额定转速r2,启动变桨系统,使风力机的转速降低至力矩切入转速r1,变桨系统使风力机转速稳定在力矩切入转速r1。
4.根据权利要求1所述的风热机组控制方法,其特征在于,当风力机在力矩切入转速r1运行时,若桨距角等于零,且风力机转速小于力矩切入转速r1,减小热泵装置的压缩机载荷;
5.根据权利要求1所述的风热机组控制方法,其特征在于,若桨距角大于第一预设值,增加热泵装置的压缩机载荷的步骤包括:
6.根据权利要求1所述的风热机组控制方法,其特征在于,若桨距角等于零,且风力机转速小于力矩切入转速r1,减小热泵装置的压缩机载荷的步骤包括:
7.根据权利要求5或6所述的风热机组控制方法,其特征在于,所述风力机和热泵装置上均设有逻辑控制模块,风力机和热泵装置的逻辑控制模块的处理器通过modbus tcp协议交互数据,风力机和热泵装置的逻辑控制模块的plc通过交换机接入modbus tcp与上位机进行通讯,接收上位机指令,并将运行信息上传至上位机界面;所述风力机的逻辑控制模块实施读取风力机的实际转速,并且所述风力机的逻辑控制模块用于向热泵装置发送增加或减小热泵装置的压缩机载荷的控制指令,热泵装置的压缩机滑阀的实时位置通过热泵装置的逻辑控制模块经modbus tcp传输至风力机的逻辑控制模块。
8.根据权利要求7所述的风热机组控制方法,其特征在于,所述热泵装置的逻辑控制模块接收风力机停机信号后,将压缩机滑阀位置调到下限,延时停止油泵。
技术总结本申请提供了一种风热机组控制方法,属于风能热利用技术领域,具体包括当环境风力大于风力机的切入风速,且所述风力机转速达到力矩切入转速R1时,启动变桨系统以使所述风力机的转速稳定在力矩切入转速R1,若桨距角大于第一预设值,增加热泵装置的压缩机载荷;当所述风力机的转速稳定在力矩切入转速R1,且所述热泵装置的压缩机载荷达到调节上限时,若桨距角大于第二预设值,启动变桨系统使所述风力机的转速达到额定转速R2,通过变桨系统使风力机转速稳定在额定转速R2。通过本申请的处理方案,提高热泵装置对风力机机械能的利用效率。技术研发人员:刘茜,钟晓晖,孙香宇,荣晓敏,李庆安,石可重受保护的技术使用者:中国科学院工程热物理研究所技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240726/127605.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。