一种基于人工智能的尿素喷射优化操作系统
- 国知局
- 2024-07-27 13:55:32
本发明涉及船舶尾气氮氧化物排放处理,具体涉及一种基于人工智能的尿素喷射优化操作系统。
背景技术:
1、选择性催化还原(selective catalytic reduction,scr)技术是一种高效的氮氧化物nox脱除技术,对尾排中有毒害污染的nox进行催化还原反应,转化为无毒无污染的氮气和水蒸气。随着船舶工业和海洋交通运输业的广泛应用,氮氧化物nox(主要为no和no2)的排放量与日俱增,对大气环境的影响愈加严峻。
2、目前船舶scr系统多使用尿素-选择性催化还原(urea-scr)技术,通入一定量的尿素水解产生氨气,但受船用燃料油中杂质及烟气排气温度影响较大。而如何合理控制的尿素喷射量以充分发挥scr系统的催化还原性能仍是工况应用面临的一大难题,增加尿素喷射量可有效提高nox转化效率,但船运排放法规对氨泄漏量具有严格限制,喷射过多的尿素会导致scr系统的氨泄漏量超出安全限值,因此scr系统需要有严格的控制策略,针对柴油机实际在变工况过程中匹配最佳的尿素喷射量,同时保证较高的nox转化率和较低的nh3逃逸率,难以实现最佳的脱硝效率。
技术实现思路
1、鉴于以上所述现有方法的局限,本发明的目的在于提供一种基于人工智能的尿素喷射优化操作系统,有利于柴油机在变工况过程中实时调控尿素喷射量,以解决催化系统老化或传感检测等无法避免的系统误差问题,有助于提高scr系统对尿素喷射控制策略的调控精度,达到同时实现最佳nox还原性能和最小氨泄漏量的目的。
2、为了实现上述目的,根据本公开的一方面,提供一种基于人工智能的尿素喷射优化操作系统,至少包括:处理器、存储器和数据采集模块,所述数据采集模块包括scr系统和无线传输单元,所述scr系统包括检测传感器,用于数据采样得到气相参数特征和状态反馈特征并存储至所述存储器;所述无线传输单元,用于无线通讯连接,将所述存储器的数据传输至所述处理器进行建模运算,得到所述scr系统的尿素喷射量并传输至所述操作系统;
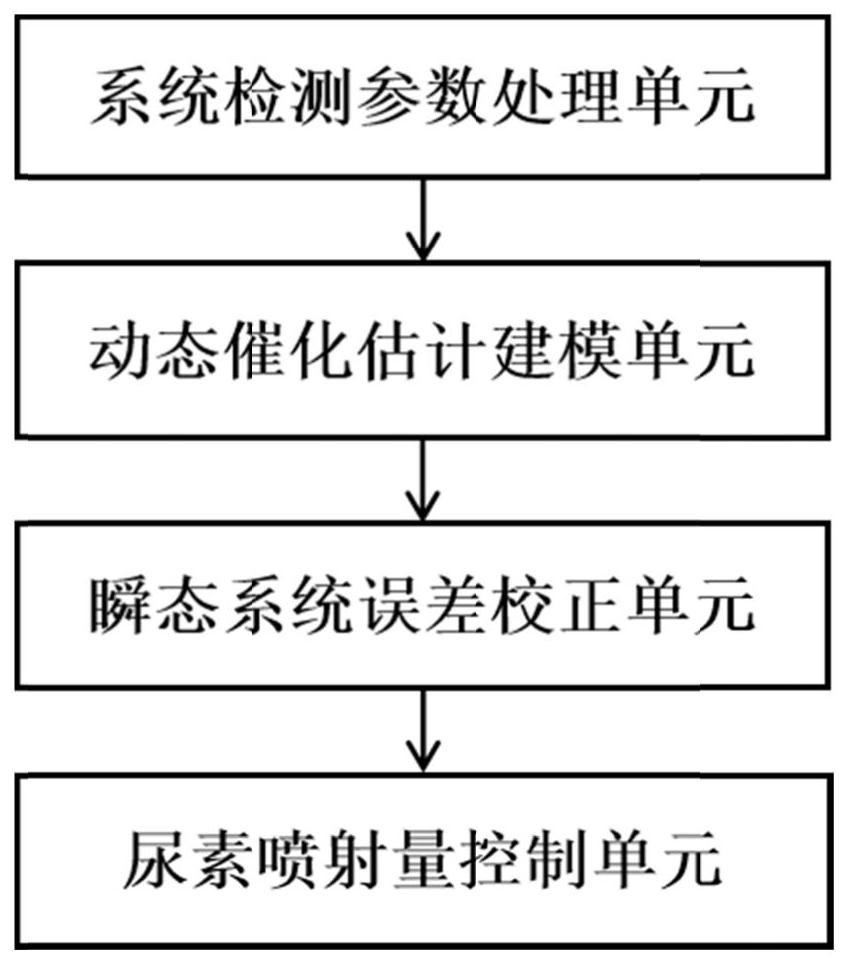
3、所述处理器执行计算机程序运行在以下所述操作系统的单元中:
4、系统检测参数处理单元,用于实时获取所述scr系统基于实际工况下检测得到所述气相参数特征和所述状态反馈特征;
5、动态催化估计建模单元,用于基于所述scr系统构建多个scr子催化器,根据多个所述动态催化估计子模型;
6、瞬态系统误差校正单元,用于结合所述状态反馈特征进行系统误差校正,构建得到瞬态系统催化修正模型;
7、尿素喷射量控制单元,用于根据所述瞬态系统催化修正模型输出的系统控制参数,调整所述scr系统的尿素喷射量。
8、进一步地,在所述系统检测参数处理单元中,随着实际工况下的任意时刻连续记录所述气相参数特征,至少包括:所述scr系统入口处的nh3和nox浓度,以及所述scr系统出口处的nox浓度和系统排气的体积流速,用于表征scr实时的催化器反应和系统排气工况。
9、进一步地,在所述系统检测参数处理单元中,随着实际工况下的任意时刻连续记录所述状态反馈特征,至少包括:所述scr系统出口处的nh3浓度和nox浓度,以及根据各个所述scr子催化器对应的动态催化估计子模型计算输出的氨覆盖率。
10、进一步地,在所述动态催化估计建模单元中,所述基于所述scr系统构建多个scr子催化器,根据所述气相参数特征建立各个所述scr子催化器对应的动态催化估计子模型的方法包括:
11、s201,所述scr系统包括scr催化器,将所述scr催化器进行均匀离散构建成num个子scr催化器,各个子scr催化器依次按序连续,按序记作第i个子scr催化器;其中,i为所述scr子催化器对应的序号,i∈[1,num],num为scr系统中所述scr子催化器的总数;
12、s202,实时获得基于实际工况下对应t时刻的所述气相参数特征,包括所述scr系统入口处在当前t时刻的nh3和nox浓度(单位,mol/m3或ppm),分别记作cnh3,in(t)和cnox,in(t);以及所述scr系统出口处在当前t时刻的nox浓度记作cnox,out(t)(单位,ppm),和对应排气的体积流速记作fout(t)(单位,m3/s),t为当前时刻(单位,s),t∈[1,time],time为所述scr系统的总时长;
13、s203,基于非线性回归模型对所述scr系统进行建模,建立cnh3,in(t)、cnox,in(t)、cnox,out(t)与氨氮摩尔比的关系式表示为s.t.,计算当前t时刻的nox转化效率记作η(t)(单位,%),其无量纲化的计算公式为:
14、
15、其中,max{s.t.[η(t)]}表示为取约束条件获得在t时刻的nox转化效率最大值对应的氨氮摩尔比作为所述模型输出,得到当前t时刻的氨氮摩尔比记作anr(t),定义为所述scr系统喷入氨的物质的量与氮氧化物的物质的量之比;
16、s204,根据所述当前t时刻的氨氮摩尔比,进一步估计得到所述scr系统入口处在t时刻喷入的nh3摩尔质量估计值记作m*nh3,in(t),其无量纲化的计算公式为:
17、
18、其中,mnox(t)为所述scr系统入口处测量得到的nox摩尔质量(单位,g/mol);
19、s205,获得所述scr系统在当前t时刻的催化器温度记作t(t),建立第i个所述scr子催化器对应的催化器温度与氨存储指数的时间关系式,其表达式为:
20、
21、其中,ωnh3(i,t)为第i个所述scr子催化器在当前t时刻对应的氨存储指数,用于表征nh3的吸附或脱附,与所述scr系统的催化器温度呈指数关系,取约束条件为在t时刻的m*nh3,in(t)最小值且η(t)最大值对应的关系式常数,作为所述scr系统的温差参数分别记作r1和r2,得到当前t时刻对应的氨存储指数;进一步计算对应的氨覆盖率估计值,其无量纲化的计算公式为:
22、
23、其中,θ*nh3(i,t)表示为第i个所述scr子催化器在当前t时刻输出的氨覆盖率估计值;
24、s206,将所述第i个子scr催化器的输出端作为第i+1个子scr催化器的输入端,根据所述氨存储指数ωnh3(i,t)和所述氨覆盖率估计值θ*nh3(i,t),构建第i个所述scr子催化器在t时刻对应的动态催化估计子模型记作sim(i,t),其无量纲化的计算公式为:
25、
26、
27、
28、
29、
30、其中,cnh3(i,t)和cnh3(i+1,t)分别表示为第i个和第i+1个所述scr子催化器在当前t时刻输出的nh3浓度,cnox(i,t)和cnox(i+1,t)分别表示为第i个和第i+1个所述scr子催化器在当前t时刻输出的nox浓度,fout(t)为所述scr系统出口处在t时刻排气对应的体积流速,v为所述scr系统的催化器体积(单位,m3);根据所述氨覆盖率估计值θ*nh3(i,t)对变量t计算偏差得到rads(i)和rdes(i),分别为第i个scr子催化器产生吸附反应和脱附反应的转化因子。
31、进一步地,在所述瞬态系统误差校正单元中,根据多个所述动态催化估计子模型,结合所述状态反馈特征进行系统误差校正,构建得到瞬态系统催化修正模型的方法为:
32、s301,设定迁移修正区域尺寸大小为wi×wt(单位,s),wi∈[1,floor(num/n)],wt∈[1,floor(time/n)],floor为向下取整函数,num为scr系统中所述scr子催化器的总数,time为所述scr系统的总时长;根据多个所述动态催化估计子模型sim(i,,t)=[cnox(i,t),cnh3(i,t),θ*nh3(i,t)],取wi和wt的最大公因数为移动间隔记作n,移动计算在所述迁移修正区域内的nox修正值和nh3修正值,其计算公式为:
33、
34、
35、其中,p值为移动序号,计算同时满足关系式s1:wi+n×p≤num和关系式s2:wt+n×p≤time的最大p值向下取整为移动阈值记作th,p∈[1,th];以移动阈值为th在所述迁移修正区域为wi×wt内分别计算cnox(i,t)积分并求和取均值得到nox修正值记作δcnox,wi×wt;同理地,以移动阈值为th在所述迁移修正区域为wi×wt内分别计算cnh3(i,t)积分并求和取均值得到nh3修正值记作δcnh3,wi×wt;
36、s302,结合所述状态反馈特征,包括所述scr系统出口处的nox浓度cnox,out(t)和排气的体积流速fout(t),根据所述氨覆盖率估计值θ*nh3(i,t),对变量t计算偏差得到第i个scr子催化器产生吸附反应的转化因子rads(i)和对应产生脱附反应的转化因子rdes(i),计算得到当前t时刻的瞬态系统催化修正模型记作adjustθnh3(t),其无量纲化的计算公式为:
37、
38、
39、
40、
41、其中,adjustθnh3(t)=θ*nh3,out(t)定义为所述scr系统在t时刻输出的氨覆盖率修正值,其尿素喷射调整范围满足于[θ*nh3,min(t),θ*nh3,max(t)]区间之间,θ*nh3,min(t)定义为所述scr系统在t时刻输出的氨覆盖率修正值下限,θ*nh3,max(t)定义为所述scr系统在t时刻输出的氨覆盖率修正值上限,fout(t)为所述scr系统出口处在t时刻排气对应的体积流速,v为所述scr系统的催化器体积;ωnh3(i,t)为第i个所述scr子催化器在当前t时刻对应的氨存储指数。
42、进一步地,在所述尿素喷射量控制单元中,根据所述瞬态系统催化修正模型输出的系统控制参数,调整所述scr系统的尿素喷射量,其具体方法为:根据所述瞬态系统催化修正模型输出的氨覆盖率修正值,得到当前时刻的尿素喷射调整范围;得到下一时刻的氨覆盖率修正值,若所述下一时刻的氨覆盖率修正值高于所述当前时刻的尿素喷射调整范围,则以单位减少系统下一时刻的尿素喷射量;或者,若所述下一时刻的氨覆盖率修正值低于所述当前时刻的尿素喷射调整范围,则以单位增加系统下一时刻的尿素喷射量。
43、如上所述,本发明所述的一种基于人工智能的尿素喷射优化操作系统,至少具有以下有益效果:(1)构建获得基于实际工况下动态获得的气相参数特征估计得到的动态催化估计子模型,能够避免在scr催化器上下游获得的检测值随系统使用时间延长而产生的测量误差,进一步校正作为整体scr单元进行状态反馈的系统误差;(2)结合实时的状态反馈特征对实际氨覆盖率估计的系统误差进行在线修正,构建得到瞬态系统催化修正模型,能够在无需增加标定成本和试验成本的前提下,优化系统瞬态工况下的nox转化效率和氨泄漏量的动态平衡;(3)由于传感器对于系统出口处尾排的nh3和nox混合气体具有交叉敏感性,其传感反馈nox浓度的检测精度会带有一定测量误差,本发明通过对nh3浓度和nox浓度进行有限时间迁移修正得到瞬态系统催化修正模型,能够避免由于传感检测精度、催化老化或滞后时延等的系统误差影响,进一步提高尿素喷射控制精度。
本文地址:https://www.jishuxx.com/zhuanli/20240726/128203.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表