一种智能巡检机器人的制作方法
- 国知局
- 2024-07-30 13:57:26
本技术涉及巡检机器人,具体为一种智能巡检机器人。
背景技术:
1、智能巡检机器人是一种用于巡检的机器人,通常用于在物业管理、企业保全行业,其利用远程遥控车携带着摄像头进行远程监控巡检工作,巡检机器人基于ocr和图像识别能力,能模拟专业的人工操作,在全站多级页面与资金交易全流程的各个场景进行点击、识别、检查等巡检操作,可以实现app页面自动化巡检监控。
2、授权公告号为cn213054857u的中国专利公开了一种智能巡检机器人,包括车体和保护壳,所述车体的上表面固定连接有保护壳,所述保护壳的上端固定连接有联轴器,所述联轴器的上端固定连接有套管,所述套管的两侧均固定连接有连接杆,所述连接杆的一端固定连接有摄像头,所述车体的上表面位于保护壳的一侧固定连接有置物箱,所述车体的上表面位于置物箱的一侧固定连接有信号接收天线,所述车体的端部固定连接有防护栏。本实用新型通过电机工作时,带动套管进行转动,从而带动摄像头进行转动,对巡视路面进行全方位监控,通过挡雨板的设置,在下雨的时候能够保护摄像头避免受到雨水打湿,同时也能够避免太阳光照晒,有效地延长摄像头的使用寿命。
3、但是上述技术方案中存在以下缺陷:上述智能巡检机器人中防护栏在受到撞击时没有缓冲的作用,使巡检机器人撞到障碍物时内有缓冲的作用;摄像头的高度固定使摄像的角度受到限制不方便使用。
技术实现思路
1、本实用新型目的是针对背景技术中存在的问题,提出一种智能巡检机器人。
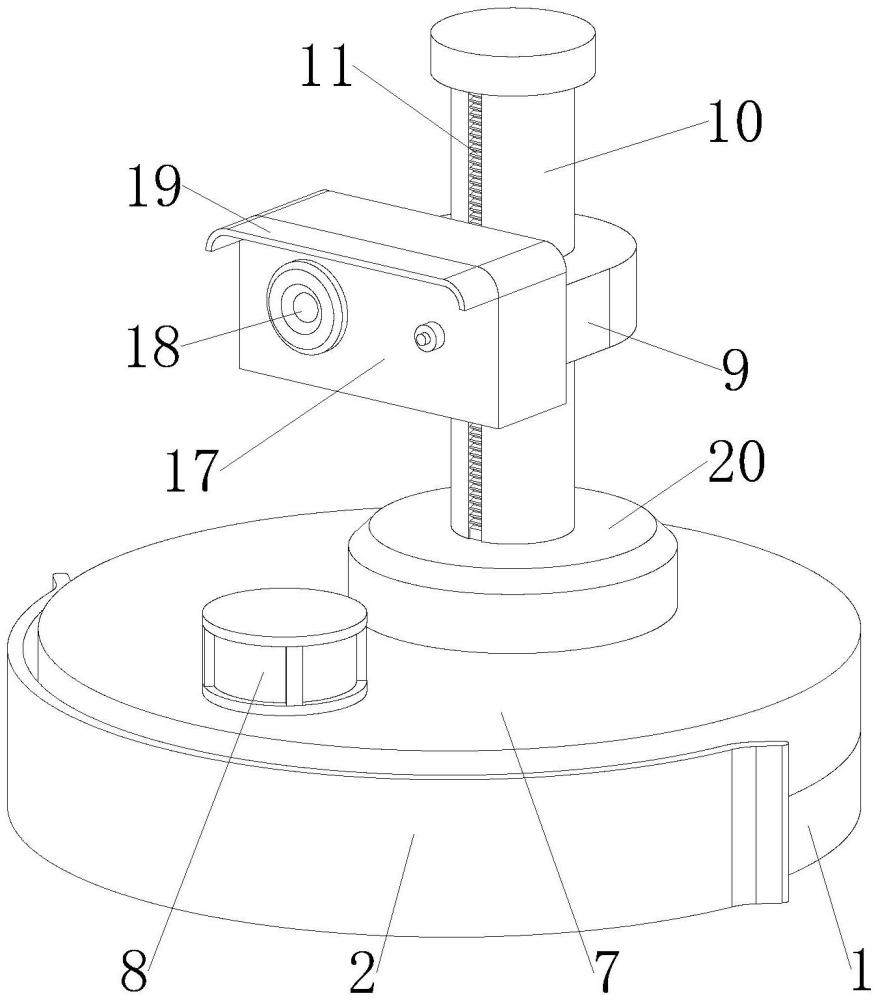
2、本实用新型的技术方案:一种智能巡检机器人,包括底座、防护板、连杆、弹簧、转轴、安装壳、安装部、支撑杆和监控机构;
3、安装壳连接底座的上端面并与底座同轴分布,支撑杆通过转轴转动连接底座的上端,底座上设有驱动组件,驱动组件传动连接转轴;
4、安装部滑动连接支撑杆,安装部内设有升降组件,升降组件与支撑杆配合连接,监控机构连接安装部,监控机构上设有用于监控的摄像头;
5、防护板通过多个连杆滑动连接安装壳,多个连杆在防护板上均匀分布,弹簧设有多个,多个弹簧分别套设在连杆的外侧,弹簧处于压缩状态;
6、底座上设有用于移动底座的移动机构,底座上设有控制机构,安装壳的上端设有激光雷达传感器,控制机构连接升降机构、驱动组件、移动机构和激光雷达传感器。
7、优选的,防护板的投影形状为半圆形,防护板包围在安装壳的外侧,防护板安装在底座的前侧。
8、优选的,升降机构包括齿条、安装杆、蜗杆、蜗轮和齿轮;
9、安装部内设有安装槽,安装杆转动连接安装槽的内壁,齿轮连接安装杆,蜗轮连接安装杆;
10、蜗杆转动连接安装槽的内壁,蜗杆与蜗轮啮合连接,安装槽内设有驱动装置,驱动装置传动连接蜗杆;
11、支撑杆的外周面设有凹槽,齿条连接凹槽,齿轮与齿条啮合连接。
12、优选的,支撑杆的外周面设有滑槽,安装部上设有滑块,滑块与滑槽滑动配合连接。
13、优选的,移动机构包括转向轮和驱动轮;
14、转向轮和驱动轮均连接底座的下端面,驱动轮设有两个,转向轮和驱动轮呈三角形分布。
15、优选的,监控机构的上端设有用于保护摄像头的遮挡板。
16、优选的,安装壳上端设有垫块,垫块与支撑杆同轴分布,垫块有一定弹性。
17、与现有技术相比,本实用新型的上述技术方案具有如下有益的技术效果:
18、本实用新型中,控制机构控制底座上的移动机构即可控制巡检机器人移动,监控机构上的摄像头对周围的环境进行摄像监测,安装部上设有升降机构可调节安装部和监控机构的高度,使监控机构的检测范围更大,驱动组件启动带动转轴和支撑杆在底座上转动即可调节监控机构的角度,在合适的场景使用合适的高度和角度;当前方遇到较小的障碍物时,半圆形防护板将小障碍物推开即可继续移动,当遇到较大的障碍物时防护板起到一定的缓冲作用,激光雷达传感器对对周围环境进行扫描检测找到绕开的方向;本实用新型中半圆形的防护板对巡检机器人进行防护和撞击缓冲,升降组件可调节监控机构的高度,使巡检机器人监测视角更灵活。
技术特征:1.一种智能巡检机器人,其特征在于,包括底座(1)、防护板(2)、连杆(3)、弹簧(4)、转轴(6)、安装壳(7)、安装部(9)、支撑杆(10)和监控机构(17);
2.根据权利要求1所述的一种智能巡检机器人,其特征在于,防护板(2)的投影形状为半圆形,防护板(2)包围在安装壳(7)的外侧,防护板(2)安装在底座(1)的前侧。
3.根据权利要求1所述的一种智能巡检机器人,其特征在于,升降机构包括齿条(11)、安装杆(12)、蜗杆(13)、蜗轮(14)和齿轮(15);
4.根据权利要求1所述的一种智能巡检机器人,其特征在于,支撑杆(10)的外周面设有滑槽(23),安装部(9)上设有滑块(24),滑块(24)与滑槽(23)滑动配合连接。
5.根据权利要求1所述的一种智能巡检机器人,其特征在于,移动机构包括转向轮(22)和驱动轮(25);
6.根据权利要求1所述的一种智能巡检机器人,其特征在于,监控机构(17)的上端设有用于保护摄像头(18)的遮挡板(19)。
7.根据权利要求1所述的一种智能巡检机器人,其特征在于,安装壳(7)上端设有垫块(20),垫块(20)与支撑杆(10)同轴分布,垫块(20)有一定弹性。
技术总结本技术涉及巡检机器人技术领域,具体为一种智能巡检机器人,包括底座、防护板、连杆、弹簧、转轴、安装壳、安装部、支撑杆和监控机构;安装壳连接底座,支撑杆通过转轴转动连接底座,底座上设有驱动组件,驱动组件传动连接转轴;安装部滑动连接支撑杆,安装部内设有升降组件,升降组件与支撑杆配合连接,监控机构连接安装部;防护板通过连杆滑动连接安装壳,弹簧分别套设在连杆;底座上设有控制机构,安装壳的上端设有激光雷达传感器,控制机构连接升降机构、驱动组件、移动机构和激光雷达传感器。本技术中半圆形的防护板对巡检机器人进行防护和撞击缓冲,升降组件可调节监控机构的高度,使巡检机器人监测视角更灵活。技术研发人员:安璐,孙小城,宋元皓受保护的技术使用者:成都廖氏红机器人有限公司技术研发日:20231115技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240729/165203.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表