一种基于自适应神经网络的AGV寻迹自抗扰控制器及其方法
- 国知局
- 2024-07-30 09:22:33
本发明涉及机器人和智能控制,具体涉及一种基于自适应神经网络的agv寻迹自抗扰控制器以及应用该控制器的方法。
背景技术:
1、随着自动导引车在工业自动化和物流领域的广泛应用,对其感知能力和运动控制的要求不断提高。在特定场景中,例如工厂内部或仓储设施,需要agv按照特定路径进行寻迹导航,并且在面对外部扰动和复杂环境时能够自适应地保持稳定运动。阿克曼轮模型是描述agv运动的经典模型之一,尤其适用于具有转弯需求的agv。其特点在于前轮具有不同转角,使得车辆能够实现曲线运动。在特定工业运输的场景中,已经有了阿克曼轮agv的大量应用。
2、但是,传统的pid控制已经无法满足了agv在具体应用场景中的抗扰的控制要求,存在以下缺陷:一,难以根据实际工作环境中的复杂动态变化改变控制器的参数;二,抵抗外部扰动的能力较差,无法适应变化的控制系统。虽然线性自抗扰控制具有显著的抗扰动能力,能够有效地抵御来自外部环境和系统内部的各种扰动。但是线性自抗扰控制器中扩展状态观测器的参数整定较为困难并且影响着控制系统的稳定性。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明的目的在于提供一种基于自适应神经网络的agv寻迹自抗扰控制器及其方法,该控制器和方法将基于自适应矩估计算法的rbf神经网络与自抗扰控制结合,可以实现对复杂非线性系统的精确建模和扰动抑制,提高了控制系统的鲁棒性和适应性。
2、本发明通过以下技术方案来实现上述目的:
3、一种基于自适应神经网络的agv寻迹自抗扰控制器,内置有自适应矩估计算法,该控制器包括:pd控制组合单元、内置有线性扩展观测器的线性自抗扰控制器、rbf神经网络,将自适应矩估计算法应用在rbf神经网络的参数优化阶段,rbf神经网络用于在线更新线性扩展观测器的三个主要参数,以实现参数的自动整定,pd控制组合单元的一个输入端连接线性扩展观测器的输出端,pd控制组合单元的另一个输入端连接速度信号输入模块,pd控制组合单元的输出端连接agv的动力系统。
4、根据本发明提供的一种基于自适应神经网络的agv寻迹自抗扰控制器,rbf神经网络为三层前馈式网络,其包括:由感知神经元组成的输入层,该输入层用于将输入变量传递到隐含层神经元,节点数由输入信号的维数确定;一个隐含层,用于将输入变量映射到隐含层空间,为非线性变换;输出层,该输出层节点数量与输出向量的维数相同,用于对隐含层的输出实现线性组合,并通过隐含层基函数的线性组合来计算节点。
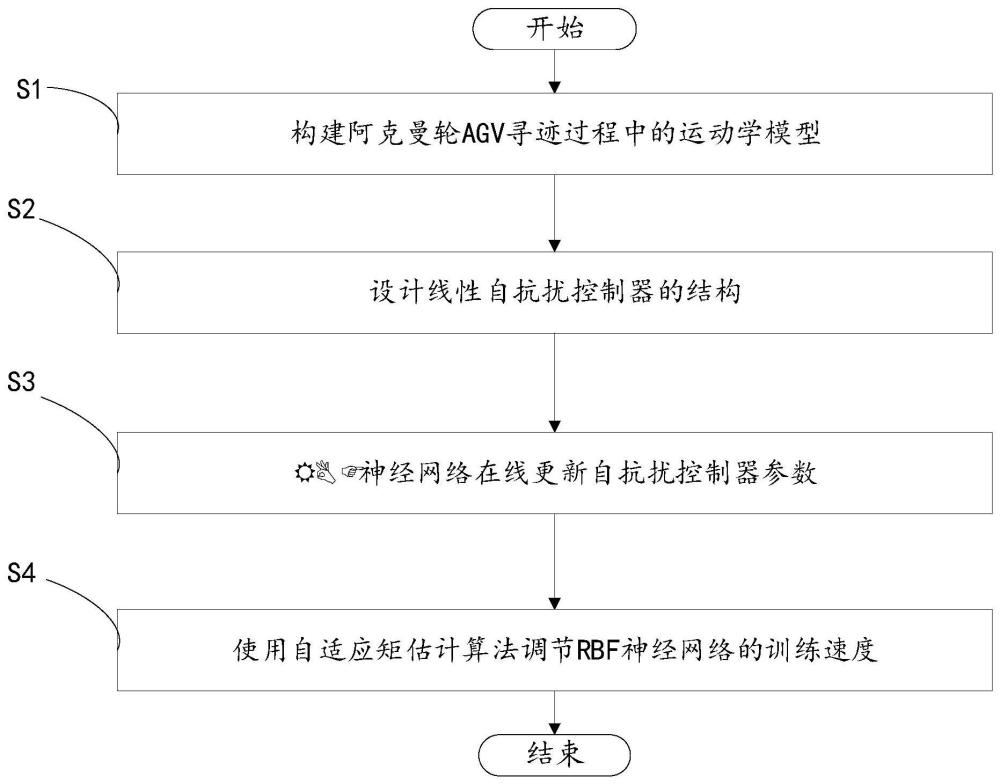
5、一种基于自适应神经网络的agv寻迹自抗扰控制器的设计方法,其特征在于,该方法应用于如权利要求1或2任一项的一种基于自适应神经网络的agv寻迹自抗扰控制器,其包括以下步骤:
6、构建阿克曼轮agv寻迹过程中的运动学模型;其中,根据阿克曼轮agv的实际轮廓构建运动学模型;
7、设计线性自抗扰控制器的结构;其中,根据阿克曼轮agv的运动学模型确定线性自抗扰控制器的结构;
8、rbf神经网络在线更新自抗扰控制器参数;其中,根据线性自抗扰控制器中的线性扩展观测器的结构设计rbf神经网络的网络结构;
9、使用自适应矩估计算法调节rbf神经网络的训练速度;其中,根据rbf神经网络的训练方式选择自适应矩估计算法进行参数的训练更新。
10、根据本发明提供的一种基于自适应神经网络的agv寻迹自抗扰控制器的设计方法,在低速运行时,所述运动学模型表示为以下公式(1):
11、
12、其中,x=[xc,yc,θc]t,u=[v,δ]t,将非线性模型进行线性化,得到增量模型。
13、根据本发明提供的一种基于自适应神经网络的agv寻迹自抗扰控制器的设计方法,在高速运行时,将公式(1)在点xr=[xr,yr,θr],ur=[vr,δr]t处泰勒展开得到公式(2);
14、
15、由此可得:
16、其中:
17、将阿克曼轮agv运动学线模型性化后的连续模型的离散形式表示为公式(3):
18、
19、将公式(3)变形得到公式(4):
20、δx(k+1)=(i+tam)δx(k)+tbmδu(k) (4)
21、令a=(i+tam),b=tbm,t为信号间隔时间,则有公式(5):
22、δx(k+1)=aδx(k)+bδu(k) (5)
23、其中:。
24、
25、根据本发明提供的一种基于自适应神经网络的agv寻迹自抗扰控制器的设计方法,所述线性自抗扰控制器的构建包括以下步骤:
26、设线性扩展观测器leso的状态方程为公式(6):
27、
28、其中,β1,β2,β3为观测器增益,设计状态反馈控制律为公式(7):
29、
30、对于阿克曼轮agv系统,控制律采用pd控制组合,即公式(8):
31、
32、其中,vr为参考信号,kp,kd为控制律增益;
33、其中,为了避免参考信号的微分引起系统振荡,将替换为
34、根据本发明提供的一种基于自适应神经网络的agv寻迹自抗扰控制器的设计方法,所述rbf神经网络的网络结构根据网络的输入和输出选择3×5×3的结构,具体包括:
35、连接输入层到隐含层,即非线性映射ol→hj,ol,l=1,2,3对应着控制器的vr,e1,e2,其中hj是径向基函数,表达式为:hj=fj(o1,o2,…,ol),j=1,2,…,5;
36、其中,fj函数选择高斯函数,表示为公式(9):
37、
38、其中,rbf神经网络隐含层节点中心qj、基宽度bj。
39、根据本发明提供的一种基于自适应神经网络的agv寻迹自抗扰控制器的设计方法,所述rbf神经网络的网络结构根据网络的输入和输出选择3×5×3的结构,具体包括:
40、连接隐含层到输出层,即hj→βm,即将隐含层的输出经过线性加权求和得到输出层的输出,βm,m=1,2,3对应着leso中的三个参数,表达式为:
41、定义误差信号e(t)=vr(t)-y(t);
42、定义误差信号的目标函数为
43、rbf神经网络隐含层节点中心qj、基宽度bj和输出层的连接权值wlj由如下规则进行调整,表示为公式(10):
44、
45、其中,γ为网络训练速度。
46、根据本发明提供的一种基于自适应神经网络的agv寻迹自抗扰控制器的设计方法,所述自适应矩估计算法包括:
47、基于梯度的一阶矩和二阶矩的平均值计算自适应参数学习率,梯度的一阶矩m_w(t)计算为过去梯度和当前梯度的平均值,表示为公式(11):
48、
49、其中,μ1是一阶矩估计的指数衰减率;
50、梯度的二阶距g_w(t)是过去梯度的平方和当前梯度的平方的平均值,表示为公式(12):
51、
52、其中,μ2是一个二阶矩估计的指数衰减率;
53、其中,一阶矩估计m_w(t)被修正,计算方程表示为公式(13):
54、
55、其中,二阶矩估计g_w(t)被修正,计算方程表示为公式(14):
56、
57、根据本发明提供的一种基于自适应神经网络的agv寻迹自抗扰控制器的设计方法,节点中心、基宽度和输出层的连接权值引入的更新规则可以被修改为公式(15):
58、
59、其中,是一个小参数,用于防止分母在实现中为0。
60、由此可见,相比较现有技术,本发明的控制器采用线性自抗扰控制设计,线性自抗扰控制是一种针对内外部干扰和参数不确定性的控制方法,它通过引入扩展庄状态观测器来抵消内外部扰动和不确定性对系统的影响;本发明将基于自适应矩估计算法的rbf神经网络与自抗扰控制结合,主要在于将自适应学习、非线性建模和扰动抑制技术相结合,以提高了控制系统的鲁棒性和适应性;本发明的自适应矩估计算法通过提供自适应的学习率调整和动量更新策略,这些改进使得自适应矩估计算法在神经网络的训练中能够更快、更稳定地收敛;本发明的rbf神经网络利用自己具有最佳逼近能力和全局最优特性的优点在线训练线性自抗扰控制器中扩展状态观测器的三个重要参数,减少参数调节时间,提高抗干扰能力,从而提高阿克曼轮agv寻迹过程中线性自抗扰控制器的性能。
61、下面结合附图和具体实施方式对本发明作进一步详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149247.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表