一种无人自主系统集群本体建模与仿真方法
- 国知局
- 2024-07-30 09:23:20
本发明属于无人自主系统集群(以下简称“无人集群”)领域,涉及无人集群的本体建模和仿真方法,具体涉及一种无人集群本体定义框架、无人集群架构的开发以及一种无人系统架构开发方法。
背景技术:
1、无人集群相比于单个平台,具有去中心化、自主协同等特点,在未来战争中将具备大规模协同、低成本和可消耗的优势,这都将给传统以单个平台为中心的无人系统运用带来巨大挑战,因此,亟需建立面向无人集群的建模与仿真框架以及架构开发方法。
2、本体是一种研究存在的概念及其内在关系的哲学思想,用来表示世界的本原及存在的本质特征。基于系统实体结构(system entity structure,ses)的本体框架从复杂系统的顶层利用多个视角、多个层级描述系统的概念和关系,但并未涉及复杂系统具体的行为和交互;而基于行为的系统(behavior based system,bbs)理论提供了由行为模式表达复杂系统交互式行为的基本方法,为面向复杂系统本体来定义行为和交互提供了解决方案。因此,采用共享的建模与仿真架构框架实现ses与bbs的有机融合,可从多维度、多尺度分析无人集群组成结构和动态行为,从而支持无人集群的本体框架的定义、设计和验证。
3、元模型(metamodel)是关于构建特定领域模型及其语义、集成和互操作等特性相关领域知识的一种信息描述方式。在一定的知识范围内,本体元建模是把概念本体转化为建模元素的过程,对建模对象的概念及其关系给出了明确的语义约定和特性描述。因此,首先运用无人集群本体框架定义无人集群和无人系统的本体;然后采用本体元建模方法,开发基于系统建模语言(systems modeling language,sysml)的无人集群和无人系统的元模型,从而为无人集群和无人系统架构建模提供精确性的语义。
4、使命工程(mission engineering)聚焦达成预期使命的效果,对当前和新兴的运行能力、系统能力进行深思熟虑的规划、分析、组织和集成,使命架构代表使命执行的详细结构。使命架构的子元素是使命线索,它包含了在一个场景或局部场景中所需完成使命的端到端任务或活动。当使命线索分解到下一个层级,包含执行端到端使命的相关的系统和/或能力,使命线索就被称为使命工程线索。而模块化开放式系统方法(modular opensystems approach,mosa)综合工程技术及商业策略要素,针对组成系统的硬件和软件进行模块化设计,并对关键接口规定采用广泛通用的接口标准,通过开放式系统设计方法的应用,可以大幅度降低系统和体系建设的成本,在极大缩短开发周期的同时,为解决方案提供了灵活、开放的系统架构。
5、目前国内外大多数文献都是针对无人集群运行中的某个具体行动或具体阶段的建模与仿真活动开展研究,在无人集群建模与仿真框架研究方面,关于无人集群概念建模的研究均较少,尚未形成统一的标准框架与规范,导致通用性不强,难以指导无人集群的设计和验证。
技术实现思路
1、针对上述问题,为了提高无人集群建模和仿真效率,本发明提出一种无人集群本体建模与仿真方法,借鉴本体描述框架和本体元建模技术,创新的提出了无人集群的本体定义框架,通过定义无人集群的宏观行为,推导出包括鸟群、蚁群、狼群机制的中观行为,从而构建无人集群元模型,通过对中观行为的分解得到基于原子动作的微观行为,并将原子动作按照mosa准则进行分配,从而构建无人系统元模型;进一步运用使命工程和模块化开放式系统方法,基于本体和元模型的精确语义,支持不同运行概念下无人集群和无人系统架构模型的快速生成和灵活重用,从而提高无人集群建模和仿真的质量,缩短建模和仿真的周期。
2、本发明提供的无人集群本体建模与仿真方法,包括以下3个步骤:
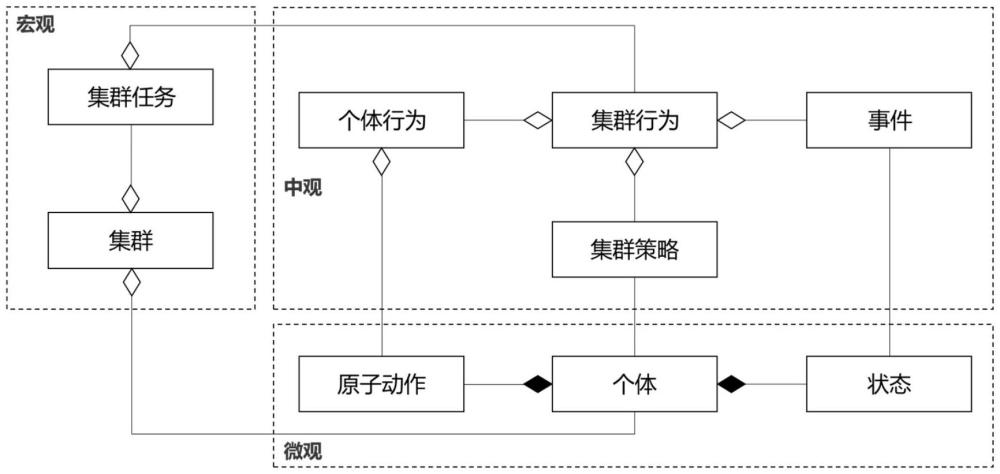
3、步骤1:基于ses的集群本体结构和bbs的集群本体行为参考框架,构建无人集群本体框架;所述无人集群本体框架从宏观、中观和微观三个层面分解无人集群任务;在宏观层面确定集群任务,即无人集群为完成使命需要具备的能力;在中观层面确定通过集群策略实现集群任务的集群行为,即无人集群个体行为与外界的交互过程,集群行为由个体行为、角色和事件聚合而成,集群策略包含不同的群体智能算法,角色包括群体智能算法中的角色;在微观层面确定实现集群行为的个体和实现个体行为的无人系统的原子动作;依据基于公理设计的群体行为推理方法,建立宏观的集群任务、中观的集群行为和个体行为、微观的原子动作三个层面之间的映射关系。
4、步骤2:采用使命工程方法建立无人集群元模型,包括:针对具体集群任务,将集群任务向下分解为集群行为,采用集群策略对集群行为进行分解获得实现集群行为所需的个体行为,建立针对具体集群任务的无人集群元模型。
5、步骤3:使用模块化开放系统方法开发无人机系统元模型。定义无人机系统(unmanned aerial system,uas)需要承担的原子动作,进而得到无人机系统内部的结构及其交互,最后运用本体元建模方法构建无人机系统元模型,支持不同任务下无人集群和无人机系统架构模型的快速生成。具体地,开发无人机系统元模型包括:将个体行为分解为无人机系统原子动作并分配到运载器平台、载荷、通信、控制单元、支持设备和人因元素,定义无人机系统内部的结构及其交互;通过对无人机系统特征的抽象、归纳,形成具有代表性的公共概念,建立无人机系统元模型。
6、所述的步骤1中,基于系统建模语言sysml构建无人集群本体模型。使用基于模型的系统工程方法,将集群任务映射为所需要的无人机集群行为,确定各集群行为下各无人机的个体行为,将个体行为分解为无人机系统本身的原子动作。
7、所述的步骤2中,使用使命工程方法分别开发鸟群机制、蚁群机制和狼群机制下的集群行为模型。
8、所述的步骤3中,基于sysml构建无人机系统内部结构的元模型以及内部结构间的交互元模型。建立的元模型包含飞行器平台元模型、载荷元模型、通信元模型、控制单元元模型、支持设备元模型、以及人因元素元模型。建立的交互元模型包括:飞行器平台分别与支持设备、载荷、通信间的交互元模型,载荷分别与飞行器平台、通信、支持设备间的交互元模型,通信分别与卫星、飞行器平台、载荷、控制单元间的交互元模型,控制单元分别与指挥中心、通信、人因元素间的交互元模型,支持设备分别于飞行器平台、载荷间的交互元模型,人因元素与控制单元的交互元模型。
9、相比现有技术,本发明的无人集群本体建模和仿真方法具有如下优点和积极效果:
10、本发明方法定义了无人集群本体框架,综合ses的无人集群本体结构和bbs的无人集群本体行为参考框架,运用使命工程方法从宏观、中观、微观三个层面定义了无人集群本体框架和元模型。本发明方法提出了公理化的基于模型的系统工程方法,开展基于sysml的无人集群架构设计并实现自动推理,建立了宏观中的群体行为、中观中的个体行为、微观中的原子动作三者之间的映射关系。本发明方法实现了包含鸟群、蚁群、狼群三种机制的无人集群策略和个体行为建模,运用模块化开放式系统方法和本体元建模方法,定义出了包含属性、状态、操作、接口等信息的无人系统元模型。本发明方法为无人集群本体建模和仿真形成了统一的标准框架与规范,通用性强,支持不同运行概念下无人集群和无人系统架构模型的快速生成和灵活重用,可以提高无人集群的建模和仿真的效率和质量,缩短建模和仿真的周期。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149322.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表