一种补偿型自抗扰控制器
- 国知局
- 2024-07-30 09:23:39
本发明涉及控制系统,是一种补偿型自抗扰控制器。
背景技术:
1、跟踪微分器的作用是安排过渡过程,给出合理的控制信号,解决了响应速度与超调性之间的矛盾。扩展状态观测器用来解决模型未知部分和外部未知扰动综合对控制对象的影响。虽然叫做扩展状态观测器,但与普通的状态观测器不同。扩展状态观测器设计了一个扩展的状态量来跟踪模型未知部分和外部未知扰动的影响。然后给出控制量补偿这些扰动。将控制对象变为普通的积分串联型控制对象。设计扩展状态观测器的目的就是观测扩展出来的状态变量,用来估计未知扰动和控制对象未建模部分,实现动态系统的反馈线性化,将控制对象变为积分串联型。非线性误差反馈控制律给出被控对象的控制策略。
2、自抗扰控制器(adrc)是一种先进的控制策略。然而,传统的adrc在非线性、不确定和耦合的系统中可能无法达到理想的控制效果,例如在存在较大模型误差或外部干扰的情况下。为了解决这个问题,本发明提出了一种补偿的adrc的解决方案,能够估计和抵消系统内部及外部的不确定性和干扰。
技术实现思路
1、针对现有技术的不足,本发明意在提供一种补偿型自抗扰控制器(adrc),用以提高在非线性、不确定和耦合的系统中的控制系统性能。基于此,本发明提供一种补偿型自抗扰控制器。
2、本发明提供了一种补偿型自抗扰控制器,本发明提供了以下技术方案:
3、一种补偿型自抗扰控制器,所述控制器包括一个补偿单元,一个扩张状态观测器和一个反馈调节单元;
4、所述补偿单元,用于接收控制器输入信号并通过补偿器进行处理;
5、所述扩张状态观测器基于第一控制信号、全扰动信号和扩张状态观测器的估计误差,将被控对象转化为积分器串联型形式,基于被控对象得到输出位移信号;
6、所述反馈调节单元,用于根据补偿信号调整控制输入,从而跟踪期望的参考轨迹。
7、优选地,进入扩张状态观测器的信号可同步,扩张状态观测器与常规自抗扰控制器相同,控制信号由补偿部分的输出代替,具体表示为:
8、
9、其中,为输入增益的估计,带补偿部分的被控系统可看作是一个被补偿系统。
10、一种补偿型自抗扰控制器的构建方法,所述方法包括以下步骤:
11、步骤1:获取第一控制信号及全扰动信息,确定输出位移;
12、步骤2:基于输出位移、系统阶数以及第三控制信号,构建相应的扩张状态观测器,并得到扩张状态观测器的相关参数及带宽;
13、步骤3:将输出位移与扩张状态观测器的第一估计状态相结合,得到扩张状态观测器关于第一状态的估计误差;
14、步骤4:将所述第一状态的估计误差与第一控制信号相结合得到第二控制信号;将第二控制信号与全扰动信号相结合,得到第三控制信号;
15、步骤5:将扩张状态观测器的所有状态的误差方程组进行拉普拉斯变换,得到扩张状态观测器的第一状态估计误差的频域表达式。
16、优选地,输出信号通过下式表示:
17、y(n)=f+bu
18、其中,y表示输出信号,u表示第一控制信号,f表示全扰动信息,b为第一控制信号的增益。
19、优选地,将线性自抗扰控制器的实际状态定义为输出位移及位移的各阶导数,通过下式表示为:
20、x1=y,…,xn=y(n-1),xn+1=f
21、则相应的扩张状态观测器表示为:
22、
23、
24、
25、
26、其中,zi(i=1...n+1)为扩张状态观测器的各个输出状态,表示扩张状态观测器的参数,表示扩张状态观测器的带宽,u表示第一控制信号。
27、优选地,当第一控制信号通过下式表示为:
28、
29、结合输出位移模型得到第一输出位移,所述第一输出位移表示为:
30、
31、则输出位移对应的第一扩张状态观测器的误差表示为:
32、
33、将扩张状态观测器对第一状态估计误差进行拉普拉斯变换,得到扩张状态观测器的观测误差通过下式表示:
34、
35、其中,e1(s)和d1(s)分别是e1和d1的拉普拉斯变换,lne1是残余扰动d1的低频近似。
36、优选地,线性自抗扰控制器通过下式表示为:
37、u1=k1(r-z1)-k2z2-…-knzn
38、其中,ki(i=1...n)为线性自抗扰控制器的控制参数。
39、一种基于补偿型自抗扰控制器的监测方法,所述方法包括以下步骤:
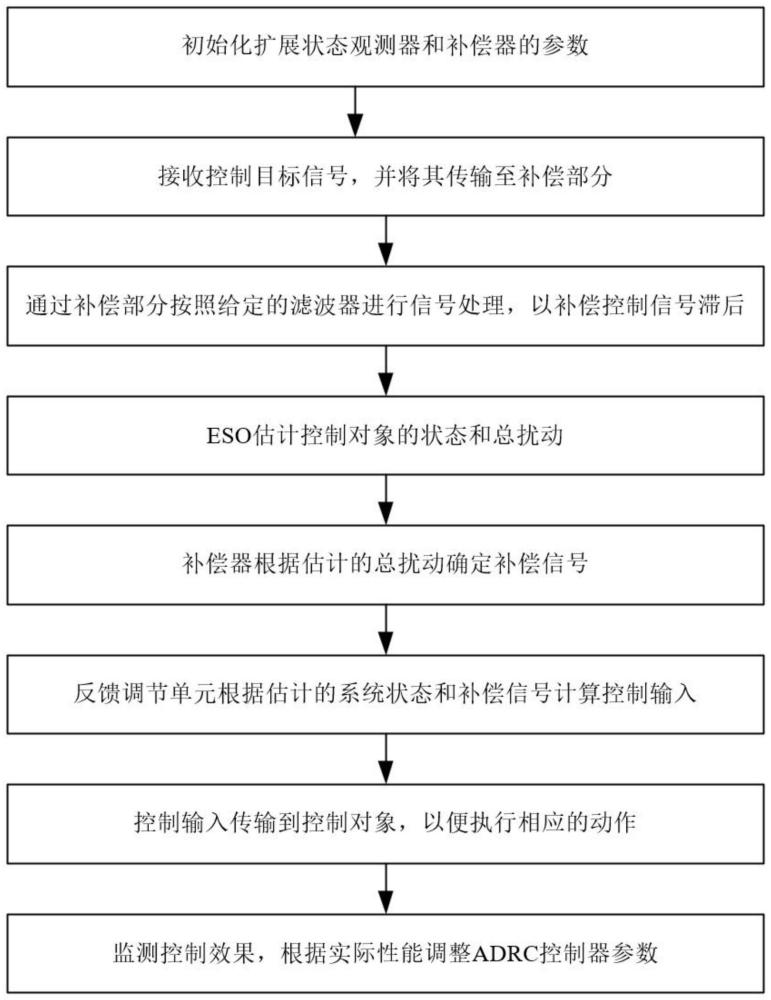
40、步骤一、启动自抗扰控制器,初始化扩展状态观测器和补偿器的参数;
41、步骤二、接收控制目标信号uf,并将其传输至补偿部分;
42、步骤三、通过补偿部分按照给定的滤波器gcp(s)进行信号处理,以补偿控制信号滞后;
43、步骤四、eso估计控制对象的状态和总扰动;
44、步骤五、补偿器根据估计的总扰动确定补偿信号;
45、步骤六、反馈调节单元根据估计的系统状态和补偿信号计算控制输入;
46、步骤七、控制输入传输到控制对象,以便执行相应的动作;
47、步骤八、监测控制效果,若未达到预期目标,则根据实际性能调整自抗扰控制器参数,并重复步骤二至步骤七。
48、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现一种基于补偿型自抗扰控制器的监测方法。
49、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现一种基于补偿型自抗扰控制器的监测方法。
50、本发明具有以下有益效果:
51、本发明与现有技术相比,其显著优点为:
52、1)通过引入扩张状态观测器(eso)等算法,能够更准确地估计和补偿系统中的各种干扰,包括模型不确定性、外部扰动等,从而实现更强大的干扰抑制能力;
53、2)通过对干扰的准确估计和强化控制器的设计,能够提高系统的稳定性和鲁棒性,使系统更加稳定可靠;
54、3)采用更准确的干扰估计和抑制方法,可以显著提高控制系统的精度和性能,使系统更加精准地响应指令和稳定工作。
技术特征:1.一种补偿型自抗扰控制器,其特征是:所述控制器包括一个补偿单元,一个扩张状态观测器和一个反馈调节单元;
2.根据权利要求1所述的控制器,其特征是:
3.一种补偿型自抗扰控制器的构建方法,其特征是:所述方法包括以下步骤:
4.根据权利要求3所述的方法,其特征是:
5.根据权利要求4所述的方法,其特征是:
6.根据权利要求5所述的方法,其特征是:
7.根据权利要求6所述的方法,其特征是:
8.一种基于补偿型自抗扰控制器的监测方法,其特征是:所述方法包括以下步骤:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行,以用于实现如权利要求8的方法。
10.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征是:所述处理器执行所述计算机程序时实现权利要求8的方法。
技术总结本发明是一种补偿型自抗扰控制器。本发明涉及控制系统技术领域,本发明通过引入扩张状态观测器(ESO)等算法,能够更准确地估计和补偿系统中的各种干扰,包括模型不确定性、外部扰动等,从而实现更强大的干扰抑制能力;通过对干扰的准确估计和强化控制器的设计,能够提高系统的稳定性和鲁棒性,使系统更加稳定可靠;采用更准确的干扰估计和抑制方法,可以显著提高控制系统的精度和性能,使系统更加精准地响应指令和稳定工作。技术研发人员:赵世泉,徐斐然,王宇超,傅荟璇,徐梓麒受保护的技术使用者:哈尔滨工程大学技术研发日:技术公布日:2024/7/23本文地址:https://www.jishuxx.com/zhuanli/20240730/149348.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表