一种移动机器人应用于复杂环境的路径规划方法及装置与流程
- 国知局
- 2024-07-30 09:23:33
本技术涉及机器人控制,具体而言,涉及一种移动机器人应用于复杂环境的路径规划方法及装置。
背景技术:
1、随着科学技术的发展和社会生产人力成本的增长,工业机器人在制造业领域的应用越来越广泛,其可以有效减轻工人的劳动强度,提高生产效率。移动机器人是工业自动化机器人领域中的重要组成部分,可以根据生产作业要求和任务规划实现精确路径的移动、在指定位置停靠并完成规定的任务动作,如:装卸货物、执行动作、充电、巡视等,是柔性生产和仓储物流自动化技术的重要组成部分,也是工业自动化的重要应用方向。
2、目前,移动机器人主要采用色带导航、磁带导航、二维码导航、反光柱导航、平面激光slam导航和视觉slam导航等方式。通过这些导航方式,机器人进行任务动作和路径规划时仅能获取局部的运行环境信息,如:色带、磁带导航方式仅能识别特定的路径上的色带或磁带,二维码导航方式仅能识别特定二维码的位置信息,反光柱导航方式只能识别环境中反光柱的位置而不能感知其他环境信息,平面激光slam导航只能扫描传感器所在平面信息而不能感知平面外的障碍物和环境,视觉slam采用的摄像头也存在视觉盲区。因此,普通移动机器人只能在道路宽敞、环境简单的工厂环境下使用。
3、在道路曲折、狭窄且环境复杂的生产环境下,或者在宽敞使用环境中的某些局部狭窄空间下,移动机器人在运行时可能会因环境感知能力不足与周围环境或障碍物发生碰撞,进而引发生产事故。为避免这种情况的发生,现有解决方案一般在移动机器人上采用多种导航方式形成混合导航,并且搭配多个避障传感器,减少探测死角,提高移动机器人的环境感知能力。
4、但是,现有解决方案主要采用多个传感器和多种导航的方法覆盖机器人传感器的检测死角,这种方法对导航和避障传感器数量的需求较多,会极大增加生产制造成本,从而影响移动机器人在工业自动化领域的进一步应用,尤其对于整体使用环境简单,但存在少数复杂局部使用环境的应用场景,这种采用多传感器方案的移动机器人显得性能剩余,存在浪费。
技术实现思路
1、为了解决在现有方法会极大的增加生产制造的成本,影响移动机器人在工业自动化领域的进一步应用,尤其对于整体使用环境简单,但存在少数复杂局部使用环境的应用场景,这种采用多传感器方案的移动机器人显得性能剩余,存在浪费的问题,本技术提供了一种移动机器人应用于复杂环境的路径规划方法:
2、根据本技术实施例的一个方面,提供了一种移动机器人应用于复杂环境的路径规划方法,所述方法包括以下步骤:
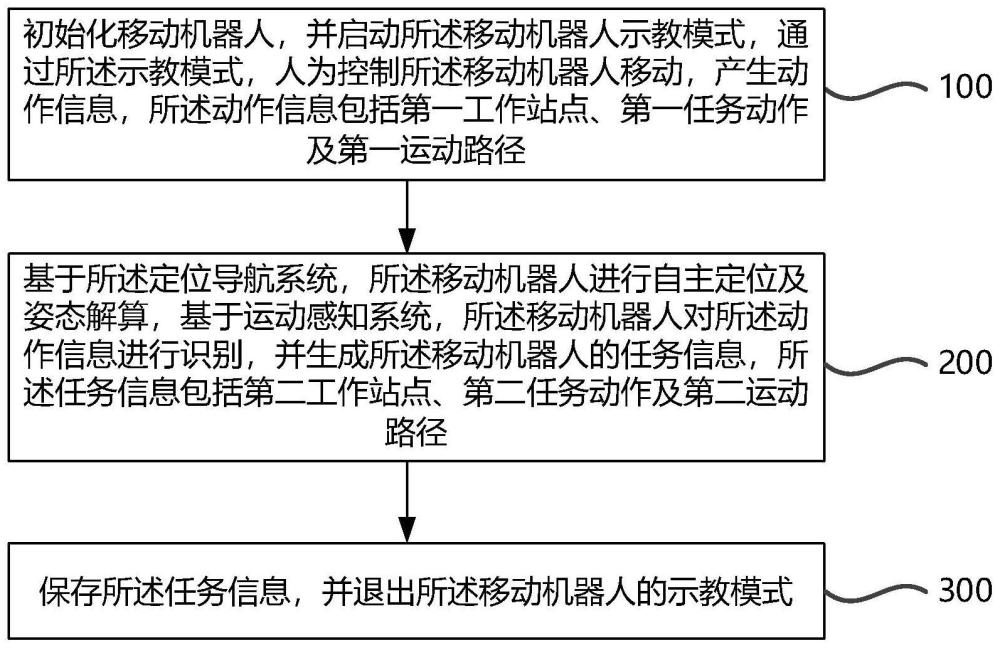
3、初始化移动机器人,并启动所述移动机器人示教模式,通过所述示教模式,人为控制所述移动机器人移动,产生动作信息,所述动作信息包括第一工作站点、第一任务动作及第一运动路径;
4、基于所述定位导航系统,所述移动机器人进行自主定位及姿态解算,基于运动感知系统,所述移动机器人对所述动作信息进行识别,并生成所述移动机器人的任务信息,所述任务信息包括第二工作站点、第二任务动作及第二运动路径;
5、保存所述任务信息,并退出所述移动机器人的示教模式。
6、在一些实施例中,在所述初始化移动机器人,并启动所述移动机器人示教模式步骤中,还包括以下步骤:
7、将所述移动机器人各驱动电机解闸;
8、将所述驱动电机的控制模式调整为力矩模式。
9、在一些实施例中,在所述通过所述示教模式,人为控制所述移动机器人移动,产生动作信息步骤中,还包括以下步骤:
10、手动设定任务开始第一工作站点;
11、手动反驱所述移动机器人产生第一任务动作;
12、手动反驱所述移动机器人产生第一运动路径;
13、手动设定任务结束第一动作站点。
14、在一些实施例中,在所述基于所述定位导航系统,所述移动机器人进行自主定位及姿态解算,基于运动感知系统,所述移动机器人对所述动作信息进行识别,并生成所述移动机器人的任务信息步骤中,还包括以下步骤:
15、在人为控制所述移动机器人移动,产生动作信息时,同步开启定位导航系统及运动感知系统;
16、所述定位导航系统记录所述移动机器人的局部定位坐标,得到第二工作站点,并通过对所述动作信息进行计算,得到第二运动路径及姿态信息;
17、所述运动感知系统记录所述移动机器人各电机的、加速度计及陀螺仪的状态信息,所述状态信息包括输出力矩、位置、速度及加速度;
18、根据所述状态信息生成所述移动机器人的第二任务动作。
19、在一些实施例中,在所述运动感知系统记录所述移动机器人各电机的、加速度计及陀螺仪的状态信息,所述状态信息包括输出力矩、位置、速度及加速度步骤之后,进一步包括以下步骤:
20、将根据所述状态信息生成所述移动机器人的运动轨迹;
21、根据所述运动轨迹对所述第二运动路径进行对比校正。
22、在一些实施例中,在人为控制所述移动机器人移动,产生动作信息时,所述驱动电机根据受力情况调整力矩大小,使所述移动机器人处于受力平衡状态,同时感知并放大操作者对所述移动机器人的控制力矩。
23、在一些实施例中,所述人为控制包括人力推动及遥控控制。
24、根据本技术实施例的一个方面,提供了一种移动机器人应用于复杂环境的路径规划装置,所述装置包括:
25、动作模块:初始化移动机器人,并启动所述移动机器人示教模式,通过所述示教模式,人为控制所述移动机器人移动,产生动作信息,所述动作信息包括第一工作站点、第一任务动作及第一运动路径;
26、计算模块:基于所述定位导航系统,所述移动机器人进行自主定位及姿态解算,基于运动感知系统,所述移动机器人对所述动作信息进行识别,并生成所述移动机器人的任务信息,所述任务信息包括第二工作站点、第二任务动作及第二运动路径;
27、记录模块:保存所述任务信息,并退出所述移动机器人的示教模式。
28、本技术的有益效果;在复杂环境下规划任务站点,运动路径,任务动作时,通过初始化移动机器人,使机器人进入手动建立任务的状态,方便进行重新记录,再通过启动示教模式,并通过人为控制移动机器人移动,产生动作信息,也就是向移动机器人进行示范,如何移动,再通过定位导航系统及运动感知系统,对人为控制移动机器人移动,产生的动作信息进行识别,以得到移动机器人的任务信息,再对任务信息进行储存,使移动机器人能够通过示教模式,对人为控制的动作信息进行学习,以便移动机器人能够在不增加机器人导航传感器数量,降低机器人生产成本的前提下,同时有效避免机器人在执行任务路径和任务动作时与复杂环境轮廓发生碰撞。
29、附图说明
30、为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
31、图1示出了本技术一实施例提供的路径规划方法的流程示意图。
32、图2示出了本技术另一实施例中通过示教模式,人为控制移动机器人产生动作信息的流程示意图。
33、图3示出了本技术另一实施例中生成移动机器人的任务信息的流程示意图。
34、图4示出了本技术一实施例提供的路径规划装置的结构示意图。
35、图5示出了本技术一实施例提供的路径规划方法应用于移动机器人的应用场景示意图。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149340.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。