一种面向海洋探测场景的AUV集群集中式敏捷协同控制方法
- 国知局
- 2024-07-30 09:23:24
本公开实施例涉及水下机器人,尤其涉及一种面向海洋探测场景的auv集群集中式敏捷协同控制方法。
背景技术:
1、自主水下航行器(autonomous underwater vehicle,auv)在海洋工程中扮演着重要角色,对于开发海洋资源和提升海洋军事实力具有战略意义。然而,单一auv由于功能载荷和控制范围的有限性,难以胜任复杂多样、覆盖范围广的任务需求,因此多auv编队协同运用成为研究重点。在海洋作业场景下,多auv编队利用协同合作与多维信息获取,提升了海洋测绘效率并增强作业可靠性,覆盖更广泛海域以实现更精确的海洋资源探测与监测。
2、对于复杂的海洋作业任务,如水下勘探、海洋测绘和军事侦察等,作业任务场景具有集群编队平台数量规模较小,作业精细程度要求较高、时效性较高的特点,而多auv编队所依赖的水声通信会受到传播时延大和水声环境变化的影响,表现出有效通信范围小和通信间歇中断的弱通信特点,进而制约了多auv编队协同控制,影响了编队队形控制的稳定性和一致性。
技术实现思路
1、为了避免现有技术的不足之处,本发明提供一种面向海洋探测场景的auv集群集中式敏捷协同控制方法,用以解决现有技术中存在多auv编队所依赖的水声通信会受到传播时延大和水声环境变化的影响,表现出有效通信范围小和通信间歇中断的弱通信特点的问题。
2、根据本公开实施例,提供一种面向海洋探测场景的auv集群集中式敏捷协同控制方法,该方法包括:
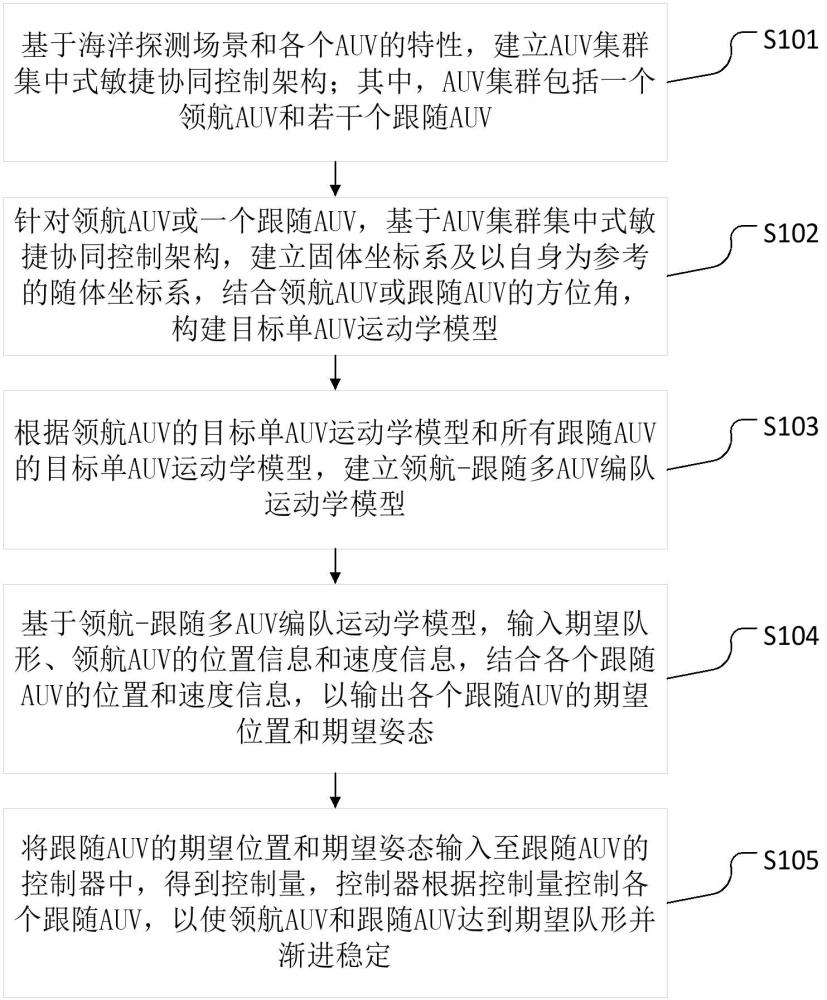
3、基于海洋探测场景和各个auv的特性,建立auv集群集中式敏捷协同控制架构;其中,auv集群包括一个领航auv和若干个跟随auv;
4、针对领航auv或一个跟随auv,基于auv集群集中式敏捷协同控制架构,建立固体坐标系及以自身为参考的随体坐标系,结合领航auv或跟随auv的方位角,构建目标单auv运动学模型;
5、根据领航auv的目标单auv运动学模型和所有跟随auv的目标单auv运动学模型,建立领航-跟随多auv编队运动学模型;
6、基于领航-跟随多auv编队运动学模型,输入期望队形、领航auv的位置信息和速度信息,结合各个跟随auv的位置和速度信息,以输出各个跟随auv的期望位置和期望姿态;
7、将跟随auv的期望位置和期望姿态输入至跟随auv的控制器中,得到控制量,控制器根据控制量控制各个跟随auv,以使领航auv和跟随auv达到期望队形并渐进稳定。
8、进一步的,该方法还包括:
9、针对海洋探测场景的网络特征,建立集中式敏捷协同网络模型,并采用基于水声modem的通信协议;其中,领航auv与各个跟随auv之间、领航auv与协作节点之间均利用集中式集群敏捷协同网络模型和基于水声modem的通信协议进行通讯。
10、进一步的,基于水声modem的通信协议依次包括头、源auv id、源auv 角色、auv 位置、任务状态、通信状态、导航信息、协同消息和尾。
11、进一步的,领航auv与跟随auv之间采用协同消息转发机制。
12、进一步的,auv集群集中式敏捷协同控制架构的结构为集中式结构,在集中式结构中,领航auv为跟随auv的层级控制中心,领航auv与各个跟随auv相互通信,auv集群集中式敏捷协同控制架构包括信息网络层、数据支持层和控制规划层。
13、进一步的,针对领航auv或一个跟随auv,基于auv集群集中式敏捷协同控制架构,建立固体坐标系及以自身为参考的随体坐标系,结合领航auv或跟随auv的方位角,构建目标单auv运动学模型的步骤中,包括:
14、针对领航auv或一个跟随auv,建立以大地为参考的固体坐标系及与以自身为参考的随体坐标系,并将随体坐标系与固体坐标系通过旋转坐标系进行关联;
15、基于关联后的固体坐标系,根据领航auv或跟随auv的俯仰角、横摇角和方位角构建初始单auv运动学模型;其中,初始单auv运动学模型的表达式为:
16、(1)
17、式中,为领航auv或跟随auv沿固体坐标系x轴方向的速度,为领航auv或跟随auv沿固体坐标系y轴方向的速度,为领航auv或跟随auv沿固体坐标系z轴方向的速度,为位移变化率,为领航auv或跟随auv的俯仰角,为领航auv或跟随auv的方位角,为领航auv或跟随auv的线速度,为领航auv或跟随auv的角速度;
18、将初始单auv运动学模型映射到平面上,以得到目标单auv运动学模型;其中,目标单auv运动学模型的表达式为:
19、(2)
20、式中,,为领航auv或跟随auv在平面的线速度。
21、进一步的,根据领航auv的目标单auv运动学模型和所有跟随auv的目标单auv运动学模型,建立领航-跟随多auv编队运动学模型的步骤中,包括:
22、领航auv和若干个跟随auv构成期望队形,领航auv的目标单auv运动学模型和各个跟随auv的目标单auv运动学模型的结构相同;
23、基于期望队形,结合领航auv的目标单auv运动学模型和所有跟随auv的目标单auv运动学模型,建立领航-跟随多auv编队运动学模型。
24、进一步的,基于领航-跟随多auv编队运动学模型,输入期望队形、领航auv的位置信息和速度信息,结合各个跟随auv的位置和速度信息,以输出各个跟随auv的期望位置和期望姿态的步骤中,包括:
25、基于领航-跟随多auv编队运动学模型,将固体坐标系下的预设编队投影到平面进行分析,结合领航auv的位置信息、速度信息和期望队形,以得到虚拟auv的估计位置和估计姿态;
26、根据虚拟auv的估计位置和估计姿态,以得到跟随auv的期望位置和期望姿态;其中,跟随auv的期望位置和期望姿态的表达式为:
27、(3)
28、式中,为第 t时刻时第艘跟随auv在坐标系下的期望位姿,为第 t时刻时领航auv在坐标系下的位姿,为第个跟随auv相对于领航auv在期望队形中的期望距离,为第个跟随auv在期望队形中相对于领航auv的期望航向角。
29、进一步的,将跟随auv的期望位置和期望姿态输入至跟随auv的控制器中,得到控制量,控制器根据控制量控制各个跟随auv,以使领航auv和跟随auv达到期望队形并渐进稳定的步骤中,包括
30、auv的控制器根据当前的状态以及跟随auv的期望位置和期望姿态设计成本函数,并构建优化问题;
31、求解优化问题以得到跟随auv的控制量,跟随auv执行控制量以进行跟随。
32、进一步的,该方法还包括:
33、领航auv或跟随auv判断是否遇到障碍物;若遇到障碍物,则分别计算障碍物斥力和目标点引力;
34、根据障碍物斥力和目标点引力计算合力;
35、根据合力与领航auv的速度信息,或者合力与跟随auv的期望位置和期望姿态,确定领航auv的速度和方向,或者跟随auv的速度和方向。
36、本公开的实施例提供的技术方案可以包括以下有益效果:
37、本公开的实施例中,通过上述面向海洋探测场景的auv集群集中式敏捷协同控制方法,一方面,针对海洋作业任务中auv集群编队数量较少且要求高精度作业的特点,建立了任务化的集中式敏捷协同控制架构,分为信息网络层、数据支持层和控制规划层三部分。信息网络层的优点是优化了通信协议和传输机制从而最小化数据传输延迟;改进水声通信协议和转发协议,提高了auv集群之间的信息交互能力;设计了合适的网络拓扑结构,确保时序同步和控制指令一致性。数据支持层的优点是整合多源数据进行融合和处理,提高了数据准确性和可靠性,为决策层提供了必要的信息和见解,更好地支持路径规划、任务分配和目标跟踪等决策。控制规划层的优点是针对实时变粒度作业,具备灵活调整作业粒度的能力,根据任务需求调整信息交互量,确保系统动态适应任务变化;针对水声通信时延较大和水声环境变化的问题,引入模型预测控制方法,以预测位置并对其进行优化。另一方面,针对集中式协同控制架构所需的高可靠性和实时性网络特征,构建了一套端到端时延最优的作业型集中式协同控制网络模型,并制定了相应的通信协议与转发协议。特别针对水声通信时延较大和水声环境变化的问题,引入模型预测控制方法,以预测位置并对其进行优化。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149327.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表