一种智能坐具的自适应调节方法及系统与流程
- 国知局
- 2024-07-30 09:25:28
本发明涉及智能家居,具体涉及一种智能坐具的自适应调节方法及系统。
背景技术:
1、随着科技的发展和生活质量的提高,各种智能化、自动化的产品不断涌现,这些创新的技术和产品大大提升了我们的生活质量。对于坐具而言,人们不再仅仅满足于其基本的功能,而是开始对其使用的舒适度、可调性以及其对健康的影响等方面有了更高的期待。
2、人的生理信息和使用场景都有很大差异,这些因素都会影响到坐具的使用感受。因此,设定坐具参数需要综合分析用户的各项生理信息。身高、体重、膝长等物理维度直接影响座高、靠背刚度和颈托高度等坐具参数。体质因素如年龄、背部和颈部健康状况等则涉及到所有坐具参数的调节。例如,年纪较大的用户可能需要更高的座高和更大的靠背倾角以便于起立和减轻关节压力。每个参数的设置都要求兼顾到用户的身体舒适度以及对坐姿和视线的影响。
3、传统的手动调节坐具方式耗时耗力,而现有的智能坐具往往采用统一的设计,不能实现针对用户个体化差异进行准确配置,难以满足用户的具体需求。因此,亟待一种能够自动感知、自适应调节和个性化配置的智能坐具调节方法,优化使用体验,提供舒适有效的支持。
技术实现思路
1、本发明的目的在于提供一种智能坐具的自适应调节方法及系统,用以提供智能坐具的个性化配置,优化用户使用体验。
2、本发明第一方面提供一种智能坐具的自适应调节方法,包括:
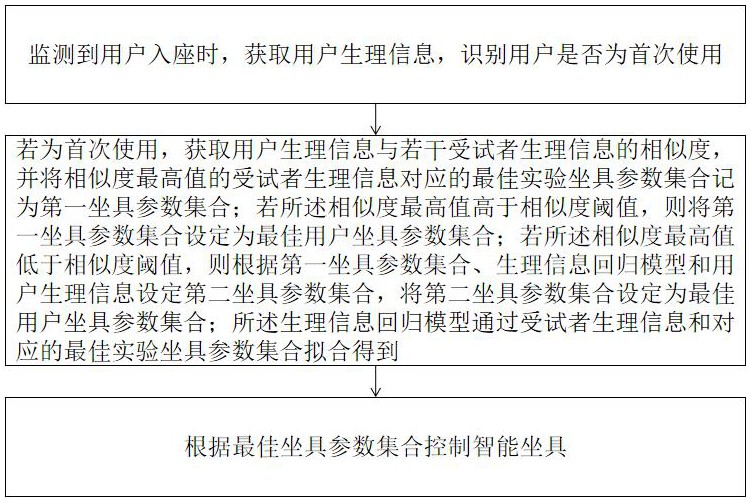
3、监测到用户入座时,获取用户生理信息,识别用户是否为首次使用;
4、若为首次使用,获取用户生理信息与若干受试者生理信息的相似度,并将相似度最高值的受试者生理信息对应的最佳实验坐具参数集合记为第一坐具参数集合;
5、若所述相似度最高值高于相似度阈值,则将第一坐具参数集合设定为最佳用户坐具参数集合;
6、若所述相似度最高值低于相似度阈值,则根据第一坐具参数集合、生理信息回归模型和用户生理信息设定第二坐具参数集合,将第二坐具参数集合设定为最佳用户坐具参数集合;所述生理信息回归模型通过受试者生理信息和对应的最佳实验坐具参数集合拟合得到;
7、根据最佳坐具参数集合控制智能坐具。
8、优选地,所述相似度表示为:
9、,
10、其中,表示用户生理信息与第i个受试者生理信息的相似度;表示用户生理信息与第i个受试者生理信息的欧式距离,,n为受试者的数量;表示用户生理信息与所有受试者生理信息的欧式距离中的最小值;表示用户生理信息与所有受试者生理信息的欧式距离中的最大值;
11、所述用户生理信息与第i个受试者生理信息的欧式距离,表示为:
12、,
13、其中,m表示生理信息维度总数,表示用户的第j个生理信息维度,为第i个受试者的第j个生理信息维度,为第j个生理信息维度的加权系数。
14、优选地,所述用户生理信息和受试者生理信息均包括六个生理信息维度,分别为身高、体重、膝长、年龄、背部健康状况评分和颈部健康状况评分;
15、所述最佳用户坐具参数集合和最佳实验坐具参数集合均包括座高、座面倾角、腰托高度、靠背倾角、靠背刚度、颈托高度和颈托刚度。
16、优选地,所述根据第一坐具参数集合、生理信息回归模型和用户生理信息设定第二坐具参数集合,包括:
17、设定粒子群参数,根据第一坐具参数集合初始化每个粒子的位置和速度;
18、根据生理信息回归模型、用户生理信息和各粒子的位置计算各粒子的适应度;
19、更新每个粒子的速度和位置,重新计算每个粒子的适应度,并根据新的适应度值更新群体最佳位置和每个粒子的个人最佳位置;
20、重复迭代直至迭代次数达到预设阈值,或者当群体最佳位置的改变值小于预设定的阈值,将群体最佳位置设定为第二坐具参数集合。
21、优选地,所述粒子的速度表示为:
22、,
23、所述粒子的位置表示为:
24、=+,
25、其中,为惯性权重,表示上一代粒子的速度对当代粒子的速度的影响;t表示迭代轮次;r表示粒子的序号;具体表示第t次迭代时第i个粒子的速度;具体表示第t次迭代时第r个粒子的位置;和分别为第一学习因子和第二学习因子,第一学习因子用于控制粒子向个人最佳位置移动的幅度,第二学习因子用于控制粒子向群体最佳位置移动的幅度,是粒子的个人最佳位置,为粒子的群体最佳位置;和均为[0,1]区间内的随机数;
26、所述惯性权重表示为:
27、,
28、其中,表示设定的最大惯性权重,表示设定的最小惯性权重,表示当前迭代次数,表示最大迭代次数。
29、优选地,所述根据生理信息回归模型、用户生理信息和各粒子的位置计算各粒子的适应度,包括步骤:
30、根据生理信息回归模型和各粒子的位置计算各粒子对应的适配生理信息预测值;
31、计算用户生理信息与适配生理信息预测值的欧式距离作为粒子的适应度。
32、优选地,所述根据受试者生理信息和对应的最佳实验坐具参数集合拟合若干生理信息回归模型之后,还包括:
33、获取受试者生理信息的生理信息维度,获取最佳实验坐具参数集合中的最佳实验坐具参数;
34、计算每个生理信息维度和最佳实验坐具参数之间的皮尔逊相关系数;
35、对每个生理信息维度与对应的坐具参数的皮尔逊相关系数的绝对值求和并归一化处理,得到生理信息维度的加权系数;
36、所述皮尔逊相关系数表示为:
37、,
38、其中,表示第生理信息参数组与第坐具参数组的协方差,;
39、表示生理信息参数组的方差,;
40、表示坐具参数组的方差,;
41、表示第生理信息参数组的参数平均值,表示第坐具参数组的参数平均值。
42、优选地,所述生理信息维度的加权系数,表示为:
43、,
44、其中,为第j个生理信息维度的加权系数,为第j个加权系数的归一化参数。
45、优选地,所述根据最佳坐具参数集合控制智能坐具,具体为:通过监测用户行为匹配坐具模式,根据坐具模式和最佳坐具参数集合控制智能坐具;
46、所述坐具模式包括写作模式、电子设备使用模式和休息模式。
47、本发明另一方面还提供一种智能坐具的自适应调节系统,应用如上所述的智能坐具的自适应调节方法,包括:
48、生理信息采集模块,用于获取用户生理信息;
49、数据处理模块,用于获取用户生理信息与受试者生理信息的相似度,以及设定最佳用户坐具参数集合;
50、坐具参数控制模块,用于根据最佳坐具参数集合控制智能坐具。
51、本发明的有益效果在于:
52、本技术实施例通过采集新用户的生理信息,并计算与已有受试者生理信息的相似度,实现了个性化的坐具参数设定;若相似度不足,还结合生理信息回归模型和用户生理信息调整坐具参数,实现了个性化和智能化调节,满足不同用户的特定需求。最后,通过实时检测用户入座,根据提前设定好的最佳坐具参数集合控制智能坐具,实现了坐具参数的动态调整和实时响应。本技术使得用户无需花费大量时间手动调整椅子参数,智能坐具可以根据用户的生理信息自动调整至最佳状态,以提升调整效率、使用舒适度和用户健康效益。
53、本技术实施例通过采用粒子群优化算法,合理地设定第二坐具参数集合,实现了坐具的个性化配置。通过设定粒子群参数并初始化每个粒子的位置和速度,然后逐步迭代,调整各粒子(坐具参数组合)的位置,找到适应度最高的参数组合。在这个过程中,粒子群优化算法通过搜索和优化,能够找到最符合用户需求的坐具参数集合。粒子群优化算法的引入,使得该实施例能够根据人体生理信息,灵活地进行坐具参数的配置,并能在多个参数之间取得一个最优的平衡,满足用户个性化坐具配置需求的同时,也保障了坐具使用的舒适度和健康性。
54、本技术实施例通过引入生理信息维度的加权系数,并将其运用于计算用户生理信息与受试者生理信息之间的相似度,以及用户生理信息与适配生理信息预测值的欧式距离,有效地提高了结果的精确性和适应度的准确性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149403.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表