一种用于曲面产品检测的线扫相机运动轨迹控制方法
- 国知局
- 2024-07-30 09:27:51
本发明涉及曲面产品检测领域,特别涉及一种用于曲面产品检测的线扫相机运动轨迹控制方法。
背景技术:
1、曲面产品检测过程中会使用线扫相机对曲面产品进行图像采集,线扫相机在采集图像时需要确保相机在运动过程中相机与产品的距离时刻为工作距离。目前线扫相机运动轨迹的控制方法是人工调节水平x轴伺服电机和垂直y轴伺服电机使得产品图像最为清晰,获取多组线扫相机x轴位置和y轴位置图像最清晰的位置数据,直接将位置数据作为伺服控制器直线插补的位置来控制相机运动.
2、为使线扫相机采集的整个图像清晰,需要在x轴方向每隔1mm获取一次位置数据,收集位置数据太多而需要大量的人员时间.
技术实现思路
1、本发明提出一种用于曲面产品检测的线扫相机运动轨迹控制方法,解决了目前收集位置数据太多而需要大量的人员时间的问题.
2、本发明的一种用于曲面产品检测的线扫相机运动轨迹控制方法,包括步骤:
3、步骤s01:获取线扫相机x轴位置和y轴位置最佳位置序列:(x01,y01)、(x02,y02)、(x03,y03)、……、(x0n,y0n),具体过程为:
4、步骤s01-01:调节x轴伺服电机,使得线扫相机恰好可以观察到待测曲面产品的左侧边缘;
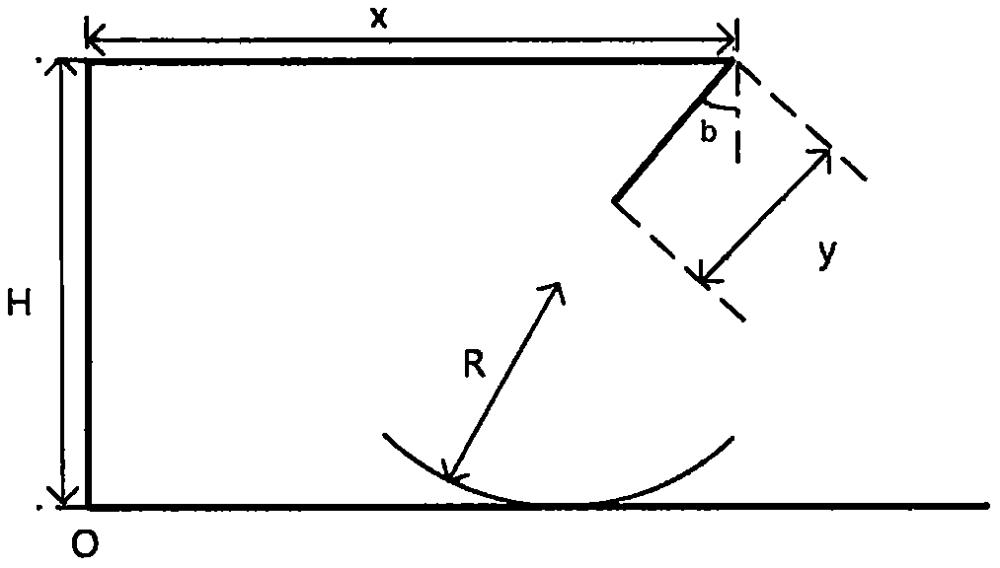
5、步骤s01-02:调节y轴伺服电机,使得线扫相机中观察到的图像灰度值之和为最大;
6、步骤s01-03:读取线扫相机x轴位置k和y轴位置q,将(k,q)作为线扫相机x轴位置和y轴位置最佳位置序列的新数据;
7、步骤s01-04:调节x轴伺服电机,使得线扫相机在x轴方向前进20mm;
8、步骤s01-05:如果线扫相机恰好可以观察到待测曲面产品的右侧边缘,则转至步骤s02,否则转至步骤s01-02;
9、步骤s02:使用matlab软件中的lsqcurvefit函数对如下公式进行参数拟合:
10、
11、其中a、b、d、e为需要拟合的参数,x对应线扫相机x轴位置和y轴位置最佳位置序列中的x01、x02、x03、……、x0n,y对应线扫相机x轴位置和y轴位置最佳位置序列中的y01、y02、y03、……、y0n;
12、步骤s03:构造线扫相机x轴运动位置x11、x12、x13、……、x1m,其中x11为距离待测曲面产品的左侧边缘往左50mm处位置,x1m为距离待测曲面产品的右侧边缘往右50mm处位置,并且x11、x12、x13、……、x1m之间的距离为1mm;
13、步骤s04:使用步骤s02中拟合得到的a、b、d、e参数,分别将x11、x12、x13、……、x1m代入到公式(1)中计算线扫相机y轴运动位置y11、y12、y13、……、y1m,将(x11、y11)、(x12,y12)、(x13,y13)、……、(x1m,y1m)作为伺服控制器直线插补的位置来控制相机运动。
14、其中,所述n为20~60.
15、其中,所述m为500~1300.
16、与现有方法相比,本发明的优点在于构建一个计算公式来对线扫相机运动位置进行计算,大大减少人工收集位置数据的个数,缩短人工收集位置数据的时间。
技术特征:1.一种用于曲面产品检测的线扫相机运动轨迹控制方法,其特征在于,包括步骤:
技术总结本发明涉及曲面产品检测领域,公开了一种用于曲面产品检测的线扫相机运动轨迹控制方法,该方法首先获取线扫相机x轴位置和y轴位置最佳位置序列:(x<subgt;01</subgt;,y<subgt;01</subgt;)、(x<subgt;02</subgt;,y<subgt;02</subgt;)、(x<subgt;03</subgt;,y<subgt;03</subgt;)、……、(x<subgt;0n</subgt;,y<subgt;0n</subgt;),然后使用MATLAB软件中的lsqcurvefit函数对推导得到的公式进行参数拟合,之后构造线扫相机x轴运动位置x<subgt;11</subgt;、x<subgt;12</subgt;、x<subgt;13</subgt;、……、x<subgt;1m</subgt;,最后使用参数拟合之后的公式计算线扫相机y轴运动位置y<subgt;11</subgt;、y<subgt;12</subgt;、y<subgt;13</subgt;、……、y<subgt;1m</subgt;,将(x<subgt;11</subgt;,y<subgt;11</subgt;)、(x<subgt;12</subgt;,y<subgt;12</subgt;)、(x<subgt;13</subgt;,y<subgt;13</subgt;)、……、(x<subgt;1m</subgt;,y<subgt;1m</subgt;)作为伺服控制器直线插补的位置来控制相机运动。本发明的优点在于构建一个计算公式来对线扫相机运动位置进行计算,大大减少人工收集位置数据的个数,缩短人工收集位置数据的时间。技术研发人员:陈佳禾,杨勇受保护的技术使用者:浙大宁波理工学院技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/149515.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表