无人机路径的避障方法及系统、最优路径确定方法及系统与流程
- 国知局
- 2024-07-30 09:28:35
本发明属于无人机,涉及无人机路线规划中的避障技术,具体为无人机路径的避障方法及系统、最优路径确定方法及系统。
背景技术:
1、无人机路径规划的本质是在起点与目标点之间计算出一条最佳飞行路径。随着无人机的广泛使用,无人机的作用范围也不断扩大,从中高空不断向低空、超低空拓展,其所面临的障碍环境也日趋复杂,甚至会在高山、树木、建筑物等复杂环境周围工作。在这些复杂环境下,无人机极易与障碍物发生碰撞。一旦无人机与障碍物发生碰撞,不仅无法保证完成任务,还会造成巨大的经济损失。因此,在无人机的飞行路径规划过程中避障是必须要考虑的因素之一。
2、关于无人机的避障也是无人机领域研究的热点。例如申请号为202410495020.4的中国专利文献,其公开了一种基于人工势场的无人机避障路径规划方法,包括:构建引力场和构建斥力场;构建并初始化规划任务表,存储规划结果的图network;遍历规划任务表,获取障碍的子目标点,迭代更新规划任务表;根据规划任务表,基于人工势场法进行迭代循环规划路径;遍历network中起点到终点的所有路径,按照设定的评价条件进行筛选,获得最优路径。该专利文献所记载的技术方案能够使无人机在路径规划的过程中进行避障,但是在面对复杂的障碍物条件下寻求高质量的最优解仍需进一步改进。现有技术中是利用粒子群算法对复杂障碍物条件下的无人机路径进行规划,但是粒子群算法在计算的过程中路径点的分布对无人机的路径规划至关重要,若路径点分布不合理,一方面可能会导致计算量大,另一方面可能无法找到合适的路径。因此,在利用粒子群算法规划无人机路径时,如何进行路径点的分布是需要解决的一大难题。
技术实现思路
1、基于背景技术中所描述的,在利用粒子群算法进行无人机路径规划时,存在路径点的分布不合理的技术问题,针对该技术问题,本发明提出了无人机路径的避障方法及系统、最优路径确定方法及系统。
2、本发明基于粒子群算法在无人机的起点与无人机的目标点之间形成多条经过飞行区域的路径,同时根据粒子群算法中粒子的维度随机给定路径的路径点数量,根据路径的路径点数量在飞行区域内将路径沿x轴方向进行分割,使路径被分割形成多个子路径段,使得路径上的路径点数量随机化,提高路径上的路径点分布规划的合理性。一方面避免计算量大,另一方面能够找到更加合适的路径。
3、为了解决上述技术问题,本发明采用如下的技术方案:
4、本发明无人机路径的避障方法,包括以下步骤:
5、规划路径:
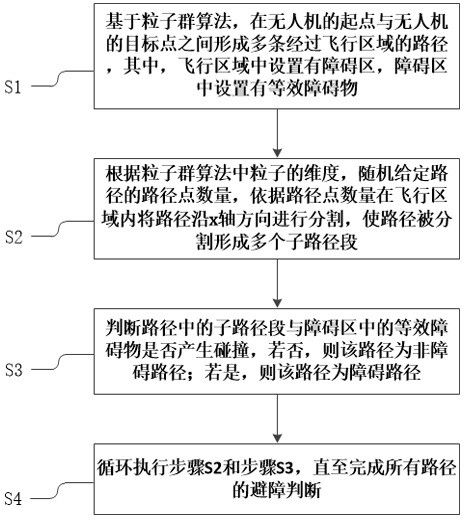
6、基于粒子群算法,在无人机的起点与无人机的目标点之间形成多条经过飞行区域的路径,其中,飞行区域中设置有障碍区,障碍区中设置有等效障碍物;
7、分割路径:
8、根据粒子群算法中粒子的维度,随机给定路径的路径点数量,依据路径点数量在飞行区域内将路径沿x轴方向进行分割,使路径被分割形成多个子路径段;
9、避障判断:
10、判断路径中的子路径段与障碍区中的等效障碍物是否产生碰撞,若否,则该路径为非障碍路径;若是,则该路径为障碍路径;
11、循环执行:
12、循环执行分割路径和避障判断,直至完成所有路径的避障判断。
13、进一步限定,所述避障判断具体包括:
14、判断路径中的子路径段对应的路径点是否在障碍区内,若否,则执行以下步骤;若是,则该路径为障碍路径;
15、判断路径的子路径段在飞行区域的投影面与障碍区的等效障碍物是否产生碰撞,若否,则该路径为非障碍路径;若是,则执行以下步骤;
16、判断路径的子路径段在飞行区域的高度方向与障碍区的等效障碍物是否产生碰撞,若否,则该路径为非障碍路径;若是,则该路径为障碍路径。
17、进一步限定,所述判断路径中的子路径段对应的路径点是否在障碍区内,若否,则执行以下步骤;若是,则该路径为障碍路径具体包括:判断路径的子路径段中的路径点和路径点是否在障碍区内,若路径点和路径点均不在障碍区内,则执行以下步骤;否则,该路径为障碍路径。
18、进一步限定,所述判断路径的子路径段在飞行区域的投影面与障碍区的等效障碍物是否产生碰撞,若否,则该路径为非障碍路径;若是,则执行以下步骤具体包括:
19、将路径的子路径段,在飞行区域对应的三维空间中的xy平面进行投影,判断子路径段中的每个点到障碍区中每个等效障碍物的距离;
20、若,则在飞行区域的投影面上与障碍区的等效障碍物不产生碰撞,则该路径为非障碍路径;
21、若否,则执行以下步骤;
22、其中,是指路径的子路径段中的第n个点到障碍区中第j个等效障碍物的距离,单位:m;是障碍区中第j个等效障碍物的等效半径,单位:m;是无人机飞行的安全距离,单位:m;是无人机的等效直径,单位:m。
23、进一步限定,所述判断路径的子路径段在飞行区域的高度方向与障碍区的等效障碍物是否产生碰撞,若否,则该路径为非障碍路径;若是,该路径为障碍路径具体包括:
24、判断路径的子路径段中的路径点和路径点与障碍区中每个等效障碍物在高度方向上是否产生碰撞;
25、若或,且或,则在高度方向上不产生碰撞,该路径为非障碍路径;
26、否则,该路径为障碍路径;
27、其中,是路径点在飞行区域中的高度,单位:m;是路径点在飞行区域中的高度,单位:m;是障碍区中第j个等效障碍物的底部高度,单位:m;是障碍区中第j个等效障碍物的顶部高度,单位:m;是无人机飞行的安全距离,单位:m。
28、本发明无人机路径的避障系统,包括:
29、路径规划模块:基于粒子群算法,在无人机的起点与无人机的目标点之间形成多条经过飞行区域的路径,其中,飞行区域中设置有障碍区,障碍区中设置有等效障碍物;
30、路径分割模块:用于根据粒子群算法中粒子的维度,随机给定路径的路径点数量,依据路径点数量在飞行区域内将路径沿x轴方向进行分割,使路径被分割形成多个子路径段;
31、避障判断模块:用于判断路径中的子路径段与障碍区中的等效障碍物是否产生碰撞,若否,则该路径为非障碍路径;若是,则该路径为障碍路径;
32、以及循环执行模块:循环执行路径分割模块和避障判断模块,直至完成所有路径的避障判断。
33、本发明无人机的最优路径确定方法,包括以下步骤:
34、将上述的无人机路径的避障方法得到的所有非障碍路径通过可行解进行约束判断,得到可行路径集;
35、建立可行路径的距离自适应函数;
36、将可行路径集代入距离自适应函数中得到距离自适应值集和最优距离自适应值;
37、通过自适应算法对距离自适应值集和最优距离自适应值进行更新和优化,得到优化后的最优距离自适应值,将优化后的最优距离自适应值对应的路径作为无人机的最优路径。
38、进一步限定,所述可行解包括路径的子路径段最短距离、路径的飞行高度以及路径对应的无人机转弯角度。
39、进一步限定,所述可行路径的距离自适应函数为:
40、
41、式中,是可行路径的距离自适应度值,单位:m;m是可行路径上路径点的序号,单位:个;b是可行路径的路径点数量,单位:个;是可行路径在飞行区域对应的三维空间中第m个路径点的x轴坐标,单位:m;是可行路径在飞行区域对应的三维空间中第m-1个路径点的x轴坐标,单位:m;是可行路径在飞行区域对应的三维空间中第m个路径点的y轴坐标,单位:m;是可行路径在飞行区域对应的三维空间中第m-1个路径点的y轴坐标,单位:m;是可行路径在飞行区域对应的三维空间中第m个路径点的z轴坐标,单位:m;是可行路径在飞行区域对应的三维空间中第m-1个路径点的z轴坐标,单位:m。
42、本发明无人机的最优路径确定系统,包括:
43、可行路径确定模块:用于将上述的无人机路径的避障方法得到的所有非障碍路径通过可行解进行约束判断,得到可行路径集;
44、自适应函数建立模块:用于建立可行路径的距离自适应函数;
45、自适应值确定模块:用于将可行路径集代入距离自适应函数中得到距离自适应值集和最优距离自适应值;
46、以及更新和优化模块:用于通过自适应算法对距离自适应值集和最优距离自适应值进行更新和优化,得到优化后的最优距离自适应值,将优化后的最优距离自适应值对应的路径作为无人机的最优路径。
47、与现有技术相比,本发明的有益效果在于:
48、1、本发明无人机路径的避障方法,其基于粒子群算法,在无人机的起点与无人机的目标点之间形成多条经过飞行区域的路径,同时根据粒子群算法中粒子的维度,随机给定路径的路径点数量,依据路径的路径点数量在飞行区域内将路径沿x轴方向进行分割,使路径被分割形成多个子路径段,使得路径上路径点的数量随机化,提高路径上的路径点分布规划的合理性。一方面避免路径上路径点的数量不合理,引起计算量大的情况;另一方面避免路径上路径点分布不合理,无法规划无人机路径。
49、2、本发明无人机路径的避障方法,其通过路径点数量将路径分为多个子路径段进行分区判断,避免陷入局部最优,而后先通过路径的子路径段与障碍区中的等效障碍物是否产生碰撞,区分障碍路径及非障碍路径;再根据子路径段在飞行区域的投影面与障碍区的等效障碍物是否产生碰撞,对非障碍路径进行进一步排查;接着再判断路径的子路径段在飞行区域的高度方向与障碍区的等效障碍物是否产生碰撞,再进行一次判断。本发明从不同的维度,层层判断,使得避障判断的精度更高。
50、3、本发明通过在障碍区中设置多个等效障碍物,使得在避障过程中能够适应不同规模的障碍物,即避障过程能够适应复杂的环境。
51、4、本发明无人机的最优路径确定方法,其通过建立可行路径的距离自适应函数,并通过自适应算法对自适应值集和最优距离自适应值进行不断更新和不断优化,降低了利用粒子群算法进行无人机规划路径时陷入局部最优的概率。
52、5、本发明无人机的最优路径确定方法,其在自适应算法中引入压缩因子,能够更好地平衡自适应算法的全局搜索能力和局部搜索能力,提高了自适应算法的计算速度。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149555.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表