控制方法、控制装置、存储介质以及水下航行器与流程
- 国知局
- 2024-07-30 09:29:44
本公开的实施例涉及载具,并且特别涉及控制方法、控制装置、存储介质以及水下航行器。
背景技术:
1、海洋中蕴含着丰富的资源,对于海洋资源的开发探索越来越得到了人们的重视,仿生学成为了研究人员关注的热点领域之一。仿生学通过学习生物的结构、功能与行为,将其运用于工程和技术领域,以期能够实现更高效、更智能的设备和系统(例如,水下航行器)。其中,胸鳍推进仿生鱼拥有宽大的胸鳍,游动更平稳,转弯更加灵活,且能在水中滑翔,从而大大降低能耗,国内外学者也对胸鳍推进仿生鱼的控制系统进行了大量研究。
技术实现思路
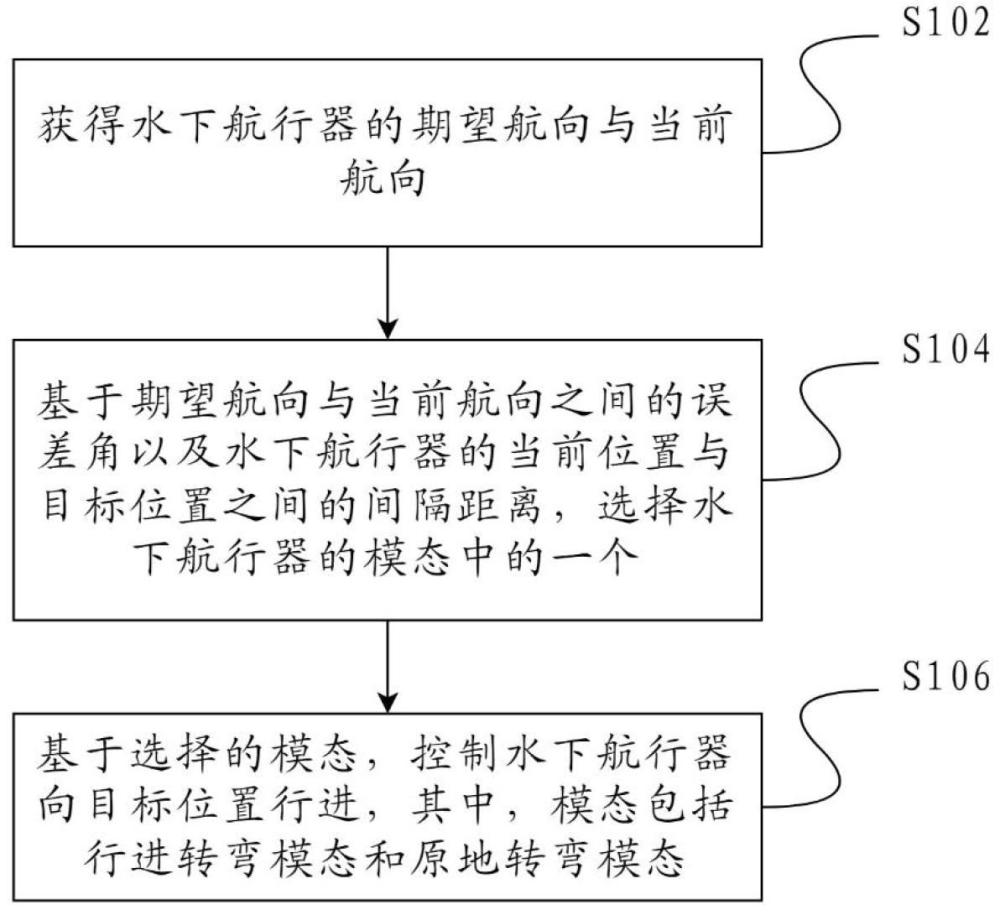
1、根据本公开的至少一实施例提供了一种用于水下航行器的控制方法,包括:获得所述水下航行器的期望航向与当前航向,基于所述期望航向与所述当前航向之间的误差角以及所述水下航行器的当前位置与目标位置之间的间隔距离,选择所述水下航行器的模态中的一个,基于选择的模态,控制所述水下航行器向所述目标位置行进,其中,所述模态包括行进转弯模态和原地转弯模态。
2、例如,根据本公开的实施例的方法,其中,所述模态还包括直游模态,所述方法还包括:基于所述误差角小于等于误差角阈值,选择所述直游模态;基于所述误差角大于所述误差角阈值并且所述间隔距离大于间隔距离阈值,选择所述行进转弯模态;或者基于所述误差角大于所述误差角阈值并且所述间隔距离小于等于所述间隔距离阈值,选择所述原地转弯模态。
3、例如,根据本公开的实施例的方法,其中,所述间隔距离阈值包括所述水下航行器的行进转弯半径。
4、例如,根据本公开的实施例的方法,通过基于所述误差角控制所述水下航行器的中枢模式发生器cpg控制器的频率,与所述误差角的大小正相关地控制转弯速度,其中,所述cpg控制器包括控制第一组舵机的第一组cpg控制器以及控制第二组舵机的第二组cpg控制器,其中,所述第一组cpg控制器具有第一频率,所述第二组cpg控制器具有第二频率,其中,所述第一组舵机与所述第二组舵机分别延纵向布置在所述水下航行器的两侧,所述第一组舵机与所述第二组舵机横向一一对应。
5、例如,根据本公开的实施例的方法,其中,基于选择的所述直游模态,控制所述水下航行器向所述目标位置行进包括:将所述第一组cpg控制器中控制纵向前后相邻的两个舵机的两个cpg控制器之间的相位差设置为第一相位差,将所述第二组cpg控制器中控制纵向前后相邻的两个舵机的两个cpg控制器之间的相位差设置为第二相位差,将所述第一组cpg控制器与所述第二组cpg控制器中的、控制在横向对应的两个舵机的两个cpg控制器之间的相位差设置为0,其中,所述第一相位差等于所述第二相位差,所述第一频率等于所述第二频率。
6、例如,根据本公开的实施例的方法,其中,基于选择的所述行进转弯模态,控制所述水下航行器向所述目标位置行进包括:将所述第一频率与所述第二频率中的一个频率设置为低于另一个频率,将所述第一组cpg控制器中控制纵向前后相邻的两个舵机的两个cpg控制器之间的相位差设置为第一相位差,将所述第二组cpg控制器中控制纵向前后相邻的两个舵机的两个cpg控制器之间的相位差设置为第二相位差,将所述第一组cpg控制器与所述第二组cpg控制器中的、控制在横向对应的两个舵机的两个cpg控制器之间的相位差设置为0,其中,所述第一相位差等于所述第二相位差。
7、例如,根据本公开的实施例的方法,其中,基于选择的所述原地转弯模态,控制所述水下航行器向所述目标位置行进包括:将所述第一组cpg控制器中控制纵向前后相邻的两个舵机的两个cpg控制器之间的相位差设置为第一相位差,将所述第二组cpg控制器中控制纵向前后相邻的两个舵机的两个cpg控制器之间的相位差设置为第二相位差,将所述第一相位差和所述第二相位差设置为互为相反数,其中,所述第一频率等于所述第二频率。
8、例如,根据本公开的实施例的方法,还包括:响应于向第一方向行进转弯,基于所述第一组cpg控制器的第一频率比例系数控制所述第一频率,基于所述第二组cpg控制器的第二频率比例系数以及所述误差角控制所述第二频率,其中,所述第一频率比例系数小于等于所述第二频率比例系数;以及响应于向第二方向行进转弯,基于第一组cpg控制器的所述第一频率比例系数以及所述误差角控制所述第一频率,基于所述第二组cpg控制器的所述第二频率比例系数控制所述第二频率,其中,所述第一频率比例系数大于等于所述第二频率比例系数。
9、例如,根据本公开的实施例的方法,还包括:基于相应舵机的负载能力以及工作环境的转弯速度要求,控制所述第一频率比例系数以及所述第二频率比例系数之间的差别。
10、例如,根据本公开的实施例的方法,还包括:基于所述第一组cpg控制器的第一频率比例系数以及所述误差角控制所述第一频率,基于所述第二组cpg控制器的第二频率比例系数以及所述误差角控制所述第二频率,其中,所述第一频率比例系数与所述第二频率比例系数相等。
11、例如,根据本公开的实施例的方法,还包括:基于相应舵机的负载能力以及工作环境的转弯速度要求,控制所述第一频率比例系数以及所述第二频率比例系数的大小。
12、例如,根据本公开的实施例的方法,其中,第一组cpg控制器以及第二组cpg控制器中的每一组cpg控制器包括1个、2个、3个、4个、5个或者6个cpg控制器。
13、例如,根据本公开的实施例的方法,其中,所述cpg控制器包括霍普夫hopf振荡器。
14、例如,根据本公开的实施例的方法,其中,基于视线制导los算法获得所述水下航行器的期望航向与当前航向。
15、根据本公开的至少一实施例提供了一种用于水下航行器的控制装置,包括一个或多个处理器;存储器,存储有一个或多个计算机程序模块;其中,所述一个或多个计算机程序模块被所述一个或多个处理器执行以实现上述方法。
16、根据本公开的至少一实施例提供了一种水下航行器,包括上述控制装置。
17、例如,根据本公开的实施例的水下航行器,其中,所述水下航行器包括蝠鲼式水下航行器。
18、根据本公开的至少一实施例提供了一种非暂时性计算机可读存储介质,其上存储有计算机可执行指令,其中,所述计算机可执行指令在被处理器执行时,以实现上述方法。
19、根据本公开的实施例的用于水下航行器的控制方法、控制装置、水下航行器以及非暂时性计算机可读存储介质可以根据具体水下场景从包括多种转弯模态的模态中选择合适的模态。基于选择的模态,可以控制水下航行器更精确的向目标点游动。此外,可以根据水下航行器的期望航向与当前航向之间的误差角控制水下航行器的转弯速度,从而进一步提高水下航行器的追踪精度。通过结合路径规划算法,可以在通讯难度大的水下环境中实现精准的路径追踪。
技术特征:1.一种用于水下航行器的控制方法,包括:
2.根据权利要求1所述的方法,其中,所述模态还包括直游模态,所述方法还包括:
3.根据权利要求2所述的方法,其中,所述间隔距离阈值包括所述水下航行器的行进转弯半径。
4.根据权利要求2所述的方法,通过基于所述误差角控制所述水下航行器的中枢模式发生器cpg控制器的频率,与所述误差角的大小正相关地控制转弯速度,
5.根据权利要求4所述的方法,其中,基于选择的所述直游模态,控制所述水下航行器向所述目标位置行进包括:
6.根据权利要求4所述的方法,其中,基于选择的所述行进转弯模态,控制所述水下航行器向所述目标位置行进包括:
7.根据权利要求4所述的方法,其中,基于选择的所述原地转弯模态,控制所述水下航行器向所述目标位置行进包括:
8.根据权利要求4所述的方法,还包括:
9.根据权利要求8所述的方法,还包括:基于相应舵机的负载能力以及工作环境的转弯速度要求,控制所述第一频率比例系数以及所述第二频率比例系数之间的差别。
10.根据权利要求7所述的方法,还包括:
11.根据权利要求10所述的方法,还包括:基于相应舵机的负载能力以及工作环境的转弯速度要求,控制所述第一频率比例系数以及所述第二频率比例系数的大小。
12.根据权利要求4所述的方法,其中,第一组cpg控制器以及第二组cpg控制器中的每一组cpg控制器包括1个、2个、3个、4个、5个或者6个cpg控制器。
13.根据权利要求4所述的方法,其中,所述cpg控制器包括霍普夫hopf振荡器。
14.根据权利要求1所述的方法,其中,基于视线制导los算法获得所述水下航行器的所述期望航向与所述当前航向。
15.一种用于水下航行器的控制装置,包括,
16.一种水下航行器,包括如权利要求15所述的控制装置。
17.根据权利要求16所述的水下航行器,其中,所述水下航行器包括胸鳍推式水下航行器。
18.一种非暂时性计算机可读存储介质,其上存储有计算机可执行指令,
技术总结本公开的实施例提供了一种控制方法、控制装置、存储介质以及水下航行器,该方法包括:获得水下航行器的期望航向与当前航向,基于期望航向与当前航向之间的误差角以及水下航行器的当前位置与目标位置之间的间隔距离,选择水下航行器的模态中的一个,基于选择的模态,控制水下航行器向目标位置行进,其中,模态包括行进转弯模态和原地转弯模态。该控制方法可以根据具体水下场景从包括多种转弯模态的模态中选择合适的模态,从而控制水下航行器更精确的向目标点游动。技术研发人员:张枭,曹程程,都学辉,毛金龙,马永生受保护的技术使用者:博雅工道(北京)机器人科技有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/149639.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表