一种AGV的安全控制系统的制作方法
- 国知局
- 2024-07-30 09:29:54
本发明涉及移动机器人,具体为一种agv的安全控制系统。
背景技术:
1、agv是自动引导车,为一种可以在工厂、仓库等环境中自主移动的机器人,它们通常用于货物运输、装卸货物、零部件搬运等任务。
2、在许多应用的工业场景中,生产环境极为复杂,为适应多变的生产环境,提高作业环境的安全性,agv在不同区域执行任务时需要根据对周边环境切换至不同的安全控制策略,保证机器人能够正常工作,同时实现对障碍物进行避让。
3、现在的agv的安全系统功能大部分较为简单,agv在全局区域内仅能执行单一的安全控制策略,agv的作业环境错综复杂,单一的安全策略不仅不能满足多样的安全要求,还会降低agv的作业效率。
技术实现思路
1、为了克服上述的技术问题,本发明的目的在于提供一种agv的安全控制系统,以解决上述背景技术中提出的现在的agv的安全系统功能大部分较为简单,agv在全局区域内仅能执行单一的安全控制策略,agv的作业环境错综复杂,单一的安全策略不仅不能满足多样的安全要求,还会降低agv的作业效率的问题。
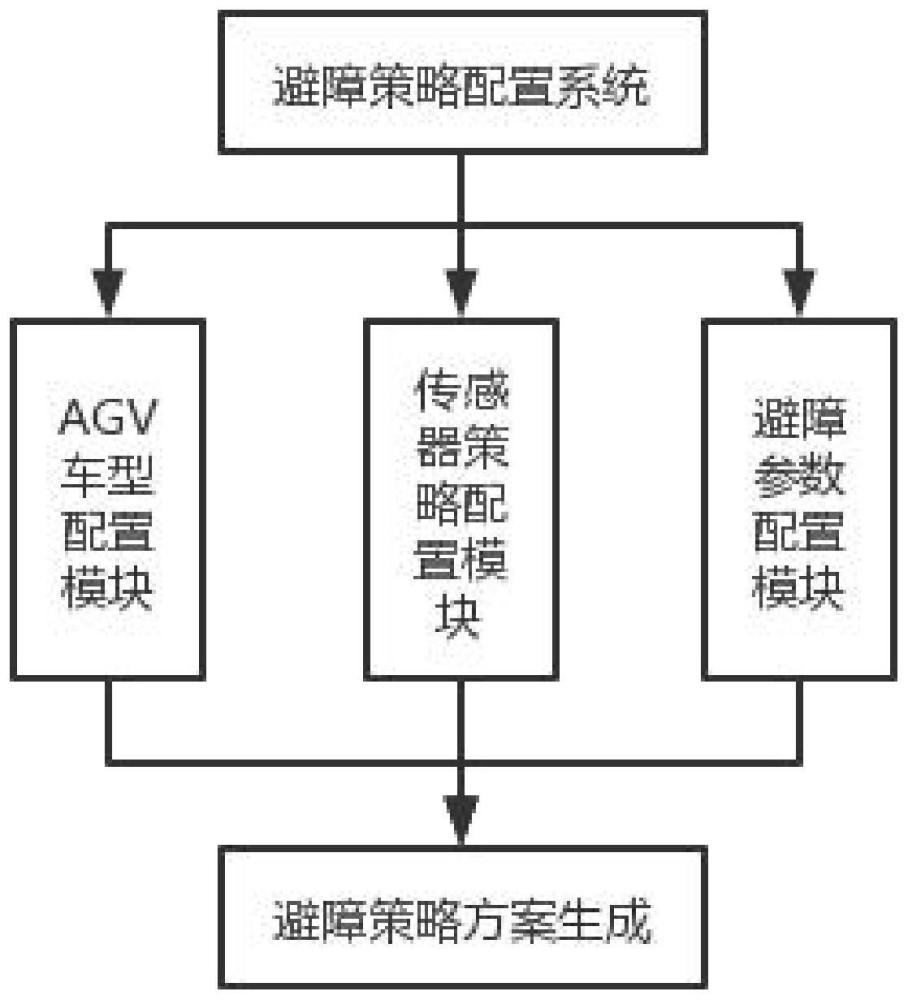
2、为实现上述目的,本发明提供如下技术方案:一种agv的安全控制系统,其特征在于,包括:避障策略配置系统和业务避障策略配置系统,所述避障策略配置系统包括:agv车型配置模块,用于选择agv车型、配置agv车体参数和避障传感器坐标参数;传感器策略配置模块,用于设置车载避障传感器的参数,包括扫描距离和扫描角度,并根据业务避障需求自定义配置传感器数量和类型;避障参数配置模块,用于设置业务避障的相关参数,包括agv停车安全距离、agv避障减速距离、agv安全范围和避障类型;所述业务避障策略配置系统包括:业务避障地图模块,用于将全局地图根据业务避障需求划分为若干个区域,并为每个区域配置不同或相同的业务避障策略;定位模块,用于反馈agv车在全局作业环境中的位置数据;业务避障策略模块,用于存储车载系统的业务避障策略,并通过业务避障配置系统进行上传、下载和编辑;运动控制模块,用于实时反馈agv的运动状态,并根据当前区域的业务避障策略规划agv的运动速度。
3、优选的,所述业务避障策略配置系统根据业务避障需求,组合成单一区域内的业务避障策略,并将策略传输至车载系统的业务避障策略模块中。
4、优选的,所述agv业务避障系统根据不同的业务避障需求,在全局作业环境中实现多样化的业务避障策略,提高agv的安全性能和作业效率。
5、优选的,所述业务避障策略配置系统和agv业务避障系统,可根据实际作业环境和需求,灵活调整和配置业务避障策略,以适应不同的安全要求和作业场景。
6、优选的,所述agv业务避障系统可实现多区域内的业务避障策略协同工作,通过定位模块实时反馈agv位置数据,实现区域间的无缝切换和业务避障策略的动态调整。
7、优选的,所述agv业务避障系统通过业务避障策略模块存储和管理多种业务避障策略,实现对策略的快速切换和更新,以应对不同的作业环境和安全需求变化。
8、优选的,所述agv业务避障系统通过运动控制模块实时调整agv的运动速度和轨迹,以确保在执行业务避障策略的同时,最大限度地提高agv的作业效率和安全性能。
9、与现有技术相比,本发明的有益效果是:
10、本发明提出了一种agv业务避障配置系统,能够根据业务避障的需求对车载的避障传感器和安全避障参数进行自由组合,从而针对不同的作业区域生成适合安全需求的最优业务避障策略。该系统能够根据agv所在的作业区域自动切换到最优的业务避障方案,提高agv的安全性能和对作业环境的适应性,同时保证作业效率。该发明主要体现在通过对全局作业环境进行区域划分,并根据安全要求配置相应的安全控制策略。agv能够通过感知系统获取当前位置及所在区域,并根据区域调整安全控制策略,从而有效适应复杂的生产环境,提高agv的安全性能。
技术特征:1.一种agv的安全控制系统,其特征在于,包括:
2.根据权利要求1所述的一种agv的安全控制系统,其特征在于:所述业务避障策略配置系统根据业务避障需求,组合成单一区域内的业务避障策略,并将策略传输至车载系统的业务避障策略模块中。
3.根据权利要求1所述的一种agv的安全控制系统,其特征在于:所述agv业务避障系统根据不同的业务避障需求,在全局作业环境中实现多样化的业务避障策略,提高agv的安全性能和作业效率。
4.根据权利要求1所述的一种agv的安全控制系统,其特征在于:所述业务避障策略配置系统和agv业务避障系统,可根据实际作业环境和需求,灵活调整和配置业务避障策略,以适应不同的安全要求和作业场景。
5.根据权利要求1所述的一种agv的安全控制系统,其特征在于:所述agv业务避障系统可实现多区域内的业务避障策略协同工作,通过定位模块实时反馈agv位置数据,实现区域间的无缝切换和业务避障策略的动态调整。
6.根据权利要求1所述的一种agv的安全控制系统,其特征在于:所述agv业务避障系统通过业务避障策略模块存储和管理多种业务避障策略,实现对策略的快速切换和更新,以应对不同的作业环境和安全需求变化。
7.根据权利要求1所述的一种agv的安全控制系统,其特征在于:所述agv业务避障系统通过运动控制模块实时调整agv的运动速度和轨迹,以确保在执行业务避障策略的同时,最大限度地提高agv的作业效率和安全性能。
技术总结本发明涉及移动机器人技术领域,具体为一种AGV的安全控制系统,包括避障策略配置系统和业务避障策略配置系统。本发明本发明主要体现在可通过对全局的作业环境进行区域划分,并对划分的区域根据安全要求配置相对应的安全控制策略,AGV能够通过感知系统获取当前的自身所在位置及所在的划分区域,并根据所在区域调整AGV当前的安全控制策略,能够有效适应复杂的生产环境和提高AGV的安全性能。技术研发人员:陈文成,吕朝顺,陈子文受保护的技术使用者:劢微机器人科技(深圳)有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/149650.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。