无人搬运系统的制作方法
- 国知局
- 2024-07-30 09:29:52
本发明涉及一种在指定的活动路线上行驶而将重物朝向指定的目的地搬运的无人搬运系统(即,自动导引系统)。
背景技术:
1、以往,使用一种无人搬运车(即,自动导引车、agv),用于在工厂或仓库等的规定场地搬运重物。在以往的无人搬运系统中,无人搬运车在场地中应行驶的活动路线(或者,路径乃至路线)由指示带等指定。无人搬运车通过检测该指示带并沿着指示带行驶,从而在指定的活动路线上行驶并将重物搬运到场地内的目的地。
技术实现思路
1、发明所要解决的问题
2、在场地中,存在需要变更目的地的情况。在该情况下,也需要变更活动路线。然而,在变更活动路线的情况下,需要重新设置场地上设置的指示带,其负担较大。
3、特别是,在无人搬运车为将放置于托盘上的重物连同托盘一起搬运的叉式升降机的情况下,由于托盘的大小变更,而保管的重物的间隔发生变更,因此,目的地产生偏差,从而频繁地进行这样的目的地的变更。因此,每次变更托盘的大小时,重新设置活动路线即指示带等的负担极大。
4、需要说明的是,无人搬运车也有不在指定的活动路线上行驶,而是通过传感来掌握周边环境(障碍物等),从而进行自主驾驶且朝向目的地行驶的自主行驶的搬运车。然而,在工厂或仓库这样的人来人往的场地内,若搬运重物的无人搬运车能够自由地在路径上行驶,则非常危险。
5、因此,本发明的目的是提供一种以在指定的活动路线上行驶为前提、用于向目的地搬送重物的新型的无人搬运系统。
6、用于解决问题的机构
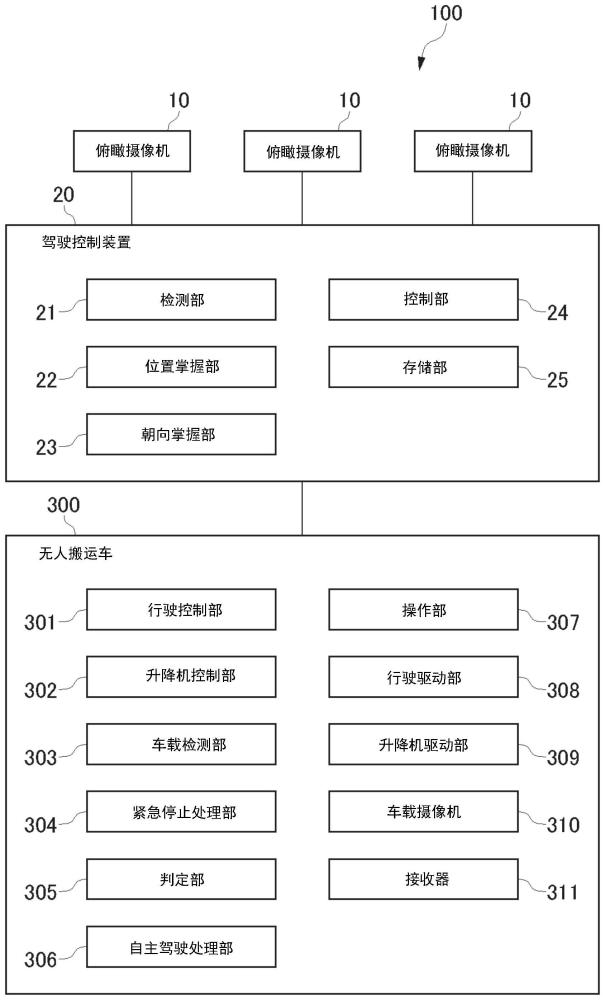
7、本发明的一方式的无人搬运系统,其为在指定的假想的活动路线上行驶而将重物朝向指定的目的地搬运的无人搬运系统,且具备:无人搬运车,其根据控制信号而以无人驾驶的方式行驶;一个或者多个摄像机,其对所述无人搬运车行驶的场地从所述场地的上方进行拍摄,并生成静止图像或者动态图像;以及驾驶控制机构,其基于所述静止图像或者动态图像,生成用于控制所述无人搬运车在所述假想的活动路线上行驶的所述控制信号,所述驾驶控制机构具备:检测部,其根据所述静止图像或者动态图像检测所述无人搬运车;位置掌握部,其利用所述检测部的检测结果,来掌握所述无人搬运车在所述场地中的位置,而不依赖搭载于所述无人搬运车的传感器;以及控制部,其基于所述位置掌握部掌握的所述无人搬运车的位置,来生成所述控制信号。
8、在上述的无人搬运系统中,所述无人搬运车可以为将放置于托盘的所述重物连同托盘一起抬起并进行搬运的叉式升降机车。
9、在上述的无人搬运系统中,所述场地可以在室内,所述一个或者多个摄像机可以安装于天花板或者墙壁,从上方拍摄所述场地。
10、在上述的无人搬运系统中,所述场地可以在室外,所述一个或者多个摄像机可以安装于设置于室外的建筑物,从上方拍摄所述场地。
11、在上述的无人搬运系统中,所述驾驶控制机构还可以具备基于所述静止图像或者动态图像来掌握所述无人搬运车的朝向的朝向掌握部,所述控制部也可以基于所述朝向掌握部掌握的朝向来生成所述控制信号。
12、在上述的无人搬运系统中,所述无人搬运车可以进行用于在所述目的地对所述重物进行装货或者卸货的自主驾驶。
13、在上述的无人搬运系统中,所述驾驶控制机构的所述检测部还可以根据所述静止图像或者动态图像检测障碍物,所述驾驶控制机构的所述控制部还可以基于所述检测部的所述检测结果,来生成所述控制信号。
14、在上述的无人搬运系统中,所述无人搬运车还可以具备操作部,该操作部用于用户进行操作以开始在所述活动路线上的行驶,所述驾驶控制机构的所述控制部可以响应于对所述操作部的所述操作而开始生成所述控制信号。
15、在上述的无人搬运系统中,还可以具备分别被指定所述目的地以及所述假想的活动路线的多个所述无人搬运车,所述驾驶控制机构的所述检测部可以根据所述静止图像或者动态图像检测多个所述无人搬运车,所述驾驶控制机构的所述位置掌握部可以掌握多个所述无人搬运车在所述场地中的各自的位置,所述驾驶控制机构的所述控制部可以基于所述位置掌握部掌握的多个位置,来生成多个所述无人搬运车的每一个的所述控制信号。
16、上述的无人搬运系统可以具备视野不同的多个所述摄像机,所述位置掌握部可以通过统合由所述多个摄像机生成的多个静止图像或者动态图像,来掌握所述无人搬运车在所述场地中的位置。
17、在上述的无人搬运系统中,所述检测部可以利用神经元网络来检测所述无人搬运车。
18、在上述的无人搬运系统中,所述无人搬运车的上表面可以具有规定标记,所述检测部可以通过检测所述规定标记来检测所述无人搬运车。
19、在上述的无人搬运系统中,所述驾驶控制机构可以存储定义有所述活动路线的所述场地的地图,所述位置掌握部可以通过将所述检测部检测到的所述无人搬运车映射在所述地图上,来掌握所述无人搬运车的位置。
20、在上述的无人搬运系统中,所述场地的规定位置可以具有规定标记,所述检测部可以检测所述规定标记,所述位置掌握部可以基于所述检测部检测到的所述规定标记,来掌握所述无人搬运车的位置。
21、在上述的无人搬运系统中,所述驾驶控制机构的所述检测部还可以检测由所述无人搬运车搬运的所述重物。
22、在上述的无人搬运系统中,所述无人搬运车可以具备:车载检测部,其用于检测周围的障碍物;和紧急停止处理部,其基于所述车载检测部对所述障碍物的检测来进行所述无人搬运车的紧急停止处理。
23、上述的无人搬运系统还可以具备脱轨判定机构,其判定所述无人搬运车是否从所述活动路线偏离,在所述脱轨判定机构判定为所述无人搬运车从所述活动路线偏离的情况下,所述驾驶控制机构生成所述控制信号,以使所述无人搬运车停止、或者使所述无人搬运车返回到所述活动路线。
24、在上述的无人搬运系统中,所述脱轨判定机构可以具备:车载摄像机,其搭载于所述无人搬运车,拍摄所述无人搬运车的周边并生成静止图像或者动态图像;和判定部,其基于所述车载摄像机生成的所述静止图像或者动态图像,来判定所述无人搬运车是否从所述活动路线偏离。
25、在上述的无人搬运系统中,所述脱轨判定机构可以具备:接收器,其接收定位用信号;和判定部,其基于由所述接收器接收到的定位用信号,来判定所述无人搬运车是否从所述活动路线偏离。
技术特征:1.一种无人搬运系统,其为在指定的假想的活动路线上行驶而将重物朝向指定的目的地搬运的无人搬运系统,且具备:
2.根据权利要求1所述的无人搬运系统,其中,
3.根据权利要求1所述的无人搬运系统,其中,
4.根据权利要求1所述的无人搬运系统,其中,
5.根据权利要求1所述的无人搬运系统,其中,
6.根据权利要求1所述的无人搬运系统,其中,
7.根据权利要求1所述的无人搬运系统,其中,
8.根据权利要求1所述的无人搬运系统,其中,
9.根据权利要求1所述的无人搬运系统,其中,
10.根据权利要求1所述的无人搬运系统,其中,
11.根据权利要求1所述的无人搬运系统,其中,
12.根据权利要求1所述的无人搬运系统,其中,
13.根据权利要求1所述的无人搬运系统,其中,
14.根据权利要求1所述的无人搬运系统,其中,
15.根据权利要求1所述的无人搬运系统,其中,
16.根据权利要求1所述的无人搬运系统,其中,
17.根据权利要求1所述的无人搬运系统,其中,
18.根据权利要求17所述的无人搬运系统,其中,
19.根据权利要求17所述的无人搬运系统,其中,
技术总结本发明提供以在指定的活动路线上行驶为前提、用于向目的地搬运重物的新型无人搬运系统。无人搬运系统为在指定假想活动路线上行驶而将重物朝向指定目的地搬运的无人搬运系统且具备:无人搬运车,根据控制信号以无人驾驶方式行驶;多个俯瞰摄像机,从场地上方拍摄无人搬运车行驶的场地并生成静止图像或动态图像;及驾驶控制装置,基于静止图像或动态图像生成用于控制无人搬运车在假想的活动路线上行驶的控制信号。驾驶控制装置具备:检测部,根据静止图像或动态图像检测无人搬运车;位置掌握部,利用检测部的检测结果掌握无人搬运车在场地中的位置而不依赖搭载于无人搬运车的传感器;及控制部,基于位置掌握部掌握的无人搬运车的位置生成控制信号。技术研发人员:重田泰受保护的技术使用者:天使集团股份有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/149647.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表