一种可随时间同步机械仿真开花自校时指针时钟装置的制作方法
- 国知局
- 2024-07-30 09:34:22
1.本发明涉及时钟领域,尤其涉及一种可随时间同步机械仿真开花自校时指针时钟装置。背景技术:2.钟表是技术与艺术完美结合的产物。作为一个时间指示器,除了指示时间外,还向人们展示着很多光、机、电、通讯、材料等现代高科技技术,同时还承载着许多历史、文化的内涵,大型建筑钟还兼具装饰、美化环境等功能。所以世界各地的许多城市,都在城市的中心地带的广场或建筑物上安装(放)一个大型时钟作为城市的景观和城市地标。3.传统时钟大多都是通过外观的变化进行装饰效果提升。装饰以静止图案、色彩结构为主,大众长期使用后容易产生审美疲劳,缺乏动感。4.传统时钟时间基准不稳定,受温度等外界环境影响较大,常常出现走时不准、停摆等问题,并且随着使用时间的加长,走时准确性的问题会越加明显。如果需要修正时间,需要人员定期手动校时,操作繁琐,走时精度直接影响用户的使用体验度。技术实现要素:5.为克服现有技术中的不足,本发明的目的在于提供一种可随时间同步机械仿真开花自校时指针时钟装置。6.为实现上述目的,本发明采用以下技术方案:一种可随时间同步机械仿真开花自校时指针时钟装置,其包括时钟系统和机械仿真开花运动系统;所述时钟系统包括走时机芯、时针、分针和时钟驱动模块,所述时钟驱动模块内设有北斗/gps卫星信息接收模块、时钟机芯控制mcu、零点位识别触发机构;所述北斗/gps卫星信息接收模块,用于接收卫星时间信号以作为标准时间信号,并将该标准时间信号发送至钟表机芯控制mcu;所述时钟机芯控制mcu,用于接收北斗/gps卫星信息接收模块发出的标准时间信号,并识别本体时间及将本体时间与标准时间对比得出需要补偿的时间差;所述零点位识别触发机构包括与分针同步转动的分针回零齿轮和与时针同步转动的时针回零齿轮及光电传感器,所述分针回零齿轮和时针回零齿轮重叠设置,且与同一转动轴转动相连;所述分针回零齿轮和时针回零齿轮均为圆盘状,且分针回零齿轮和时针回零齿轮的圆周面上均设置有一缺口,所述旋转轴的中心轴线与分针回零齿轮和时针回零齿轮的中心轴线同轴设置;当分针回零齿轮和时针回零齿轮上的缺口重叠,光电传感器向时钟机芯控制mcu发出零点位信号;当零点位识别触发机构向时钟机芯控制mcu发出零点位信号,时钟机芯控制mcu控制走时机芯动作补偿时间差,从而实现时间的校准;所述时钟机芯控制mcu在时钟走时过程中,同步向机械仿真开花系统发出时钟系统位置信号,机械仿真开花系统依据时钟系统位置信号,实现随时间逐渐变化的开花动作。7.进一步的,所述钟机芯控制mcu定时触发北斗/gps卫星信息接收标准时间信号。8.进一步的,所述机械仿真开花系统包括开花控制模块和多个仿真花,多个仿真花沿圆周方向间隔围绕在时钟外围,各仿真花均包括底座、滑动块、花蕊和多个仿真花瓣,所述仿真花瓣底部转动连接于底座的侧边,滑动块和底座之间对应各仿真花瓣分别铰接有折叠臂,各折叠臂的中部与分别对应的仿真花瓣内侧固定连接,所述花蕊固定连接在滑动块的顶部,滑动块的中心部连接至驱动软轴,驱动软轴的另一端连接至驱动电机,各驱动电机分别与开花控制模块电连接,所述开花控制模块与时钟机芯控制mcu通讯连接。9.本发明采用以上技术方案,具有以下有益技术效果:本发明利用北斗/gps卫星信息接收模块接收卫星时间信号作为标准时间,并通过时钟机芯控制mcu识别本体时间并与标准时间进行比较得出需要的补偿时间差,当时针和分针运行至零点位识别触发机构确定的校准位置后,向时钟机芯控制mcu发出电信号,时钟机芯控制mcu控制走时机芯动作补偿时间差,实现长时段下的时间准确性。在钟表的走时过程中,时钟muc同步向仿真花系统发出时钟位置指令,仿真花系统依据时钟系统位置信号,实现随时间逐渐变化的开花动作,展现出花朵开花过程的动态变化的美感。附图说明10.以下结合附图和具体实施方式对本发明做进一步详细说明;图1为本发明的系统框图;图2为仿真花布置示意图;图3为仿真花的结构示意图。具体实施方式11.请参照图1-3,本发明一种可随时间同步机械仿真开花自校时指针时钟装置,其包括时钟系统和机械仿真开花运动系统;时钟系统包括走时机芯、时针、分针和时钟驱动模块,时钟驱动模块内设有北斗/gps卫星信息接收模块、时钟机芯控制mcu、零点位识别触发机构;北斗/gps卫星信息接收模块,用于接收卫星时间信号以作为标准时间信号,并将该标准时间信号发送至钟表机芯控制mcu;时钟机芯控制mcu,用于接收北斗/gps卫星信息接收模块发出的标准时间信号,并识别本体时间及将本体时间与标准时间对比得出需要补偿的时间差;零点位识别触发机构包括与分针同步转动的分针回零齿轮和与时针同步转动的时针回零齿轮及光电传感器,分针回零齿轮和时针回零齿轮重叠设置,且与同一转动轴转动相连;分针回零齿轮和时针回零齿轮均为圆盘状,且分针回零齿轮和时针回零齿轮的圆周面上均设置有一缺口,旋转轴的中心轴线与分针回零齿轮和时针回零齿轮的中心轴线同轴设置;当分针回零齿轮和时针回零齿轮上的缺口重叠,光电传感器向时钟机芯控制mcu发出零点位信号;当零点位识别触发机构向时钟机芯控制mcu发出零点位信号,时钟机芯控制mcu控制走时机芯动作补偿时间差,从而实现时间的校准;时钟机芯控制mcu在时钟走时过程中,同步向机械仿真开花系统发出时钟系统位置信号(时针和分针的位置),机械仿真开花系统依据时钟系统位置信号,实现随时间逐渐变化的开花动作。12.钟机芯控制mcu定时触发北斗/gps卫星信息接收标准时间信号。13.机械仿真开花系统包括开花控制模块和多个仿真花,多个仿真花沿圆周方向间隔围绕在时钟外围,各仿真花均包括底座1、滑动块2、花蕊7和多个仿真花瓣3,仿真花瓣3底部转动连接于底座1的侧边,滑动块2和底座1之间对应各仿真花瓣3分别铰接有折叠臂4,各折叠臂4的中部与分别对应的仿真花瓣3内侧固定连接,花蕊7固定连接在滑动块2的顶部,滑动块2的中心部连接至驱动软轴5,驱动软轴5的另一端连接至驱动电机6,各驱动电机6分别与开花控制模块电连接,开花控制模块与时钟机芯控制mcu通讯连接。14.驱动电机6输出直线驱动,驱动软轴5将驱动电机6驱动的直线运动传递到滑动块2,通过滑动块2的伸缩带动折叠臂4伸缩,从而带动仿真花瓣3开放和收拢。15.本发明利用北斗/gps卫星信息接收模块接收卫星时间信号作为标准时间,并通过时钟机芯控制mcu识别本体时间并与标准时间进行比较得出需要的补偿时间差,当时针和分针运行至零点位识别触发机构确定的校准位置后,向时钟机芯控制mcu发出电信号,时钟机芯控制mcu控制走时机芯动作补偿时间差,实现长时段下的时间准确性。在钟表的走时过程中,时钟muc同步向仿真花系统发出时钟位置指令,仿真花系统依据时钟系统位置信号,实现随时间逐渐变化的开花动作,展现出花朵开花过程的动态变化的美感。如图2所示,该时钟显示时间是10点10分,此时1至10点位置的仿真花处于开放状态,当时间变成11点时,11点位置的仿真花也开放(此时1-11点位置的仿真花全部处于开放状态);当时间变成12点时,12点位置的仿真花也开放(此时1-12点位置的仿真花全部处于开放状态),超过12点后,全部仿真花全部收拢,当变成1点时,1点位置的仿真花开放,当变成2点时,2点位置的仿真花也开放(此时1-2点位置的仿真花处于开放状态),以此循环实现随时间逐渐变化的开花动作。16.上面结合附图对本发明的实施加以描述,但是本发明不局限于上述的具体实施方式,上述的具体实施方式是示意性而不是加以局限本发明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
本文地址:https://www.jishuxx.com/zhuanli/20240730/150005.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
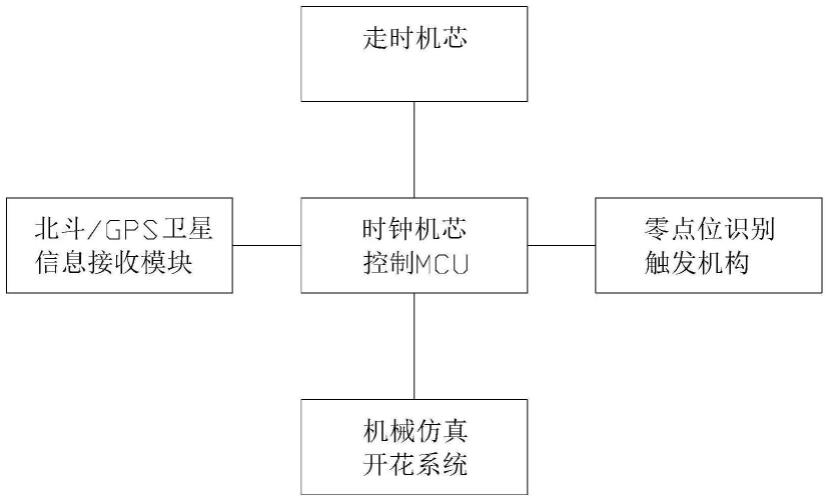
下一篇
返回列表