一种航空发动机外形特征点共面检测系统及方法与流程
- 国知局
- 2024-07-30 10:39:05
本发明涉及航空发动机,具体涉及一种航空发动机外形特征点共面检测系统及方法。
背景技术:
1、在航空发动机装配过程中,需要保证外部多处特征点共面(共面程度满足一定设计要求),当多处特征点不共面时,需要调整机匣的角向位置使特征点共面。这项工作对发动机在飞机短舱中的装配姿态和推力方向准确性的保证有极重要的意义。
2、在传统测量方案中,常常会使用三坐标检测仪、激光跟踪仪等成熟的设备和检测方法对实物外形特征进行采点,在计算机软件程序中拟合出基准平面,然后计算在基准平面法相方向上所有点的最远距离,以此评估多个外部特征的共面程度。但是由于航空发动机整机外形尺寸较大,待检测特征点分布范围广,且无法从同一视角观察到所有特征,此时三坐标检测仪、激光跟踪仪等传统测量设备和方案便不适用了。
技术实现思路
1、有鉴于此,本技术实施例提供一种航空发动机外形特征点共面检测系统及方法,解决了航空发动机外形上无法同一视角检测多处特征点是否共面的技术问题,从而实现检测航空发动机外形多处特征点是否共面,并且指导机匣角向位置调整的目的。
2、本技术实施例提供以下技术方案:一种航空发动机外形特征点共面检测系统,包括:
3、至少三组激光投线仪-导轨组件,所述激光投线仪-导轨组件包括双转轴环形激光投线仪和线性导轨,所述双转轴环形激光投线仪安装在所述线性导轨上,所述双转轴环形激光投线仪连接第一驱动装置,以驱动所述双转轴环形激光投线仪沿所述线性导轨所限定的直线方向的运动轨迹移动;
4、所述双转轴环形激光投线仪包括激光投线仪、内支撑环和外支撑环,所述激光投线仪安装在所述内支撑环上,所述内支撑环与所述外支撑环刚性连接,所述激光投线仪连接第二驱动装置,以驱动所述激光投线仪绕所述内支撑环的轴线旋转,所述外支撑环连接第三驱动装置,以驱动所述外支撑环绕其自身轴线旋转;其中,所述激光投线仪的旋转轴线与所述外支撑环的旋转轴线互相垂直并相交于所述激光投线仪外壳的几何中心;
5、还包括光学追踪器,所述光学追踪器固定在地面上,每个所述激光投线仪的外表面上分别以不同方式设置可供所述光学追踪器捕捉的特性标记点,使所述光学追踪器可捕捉到所有所述激光投线仪的位置和方向信息;
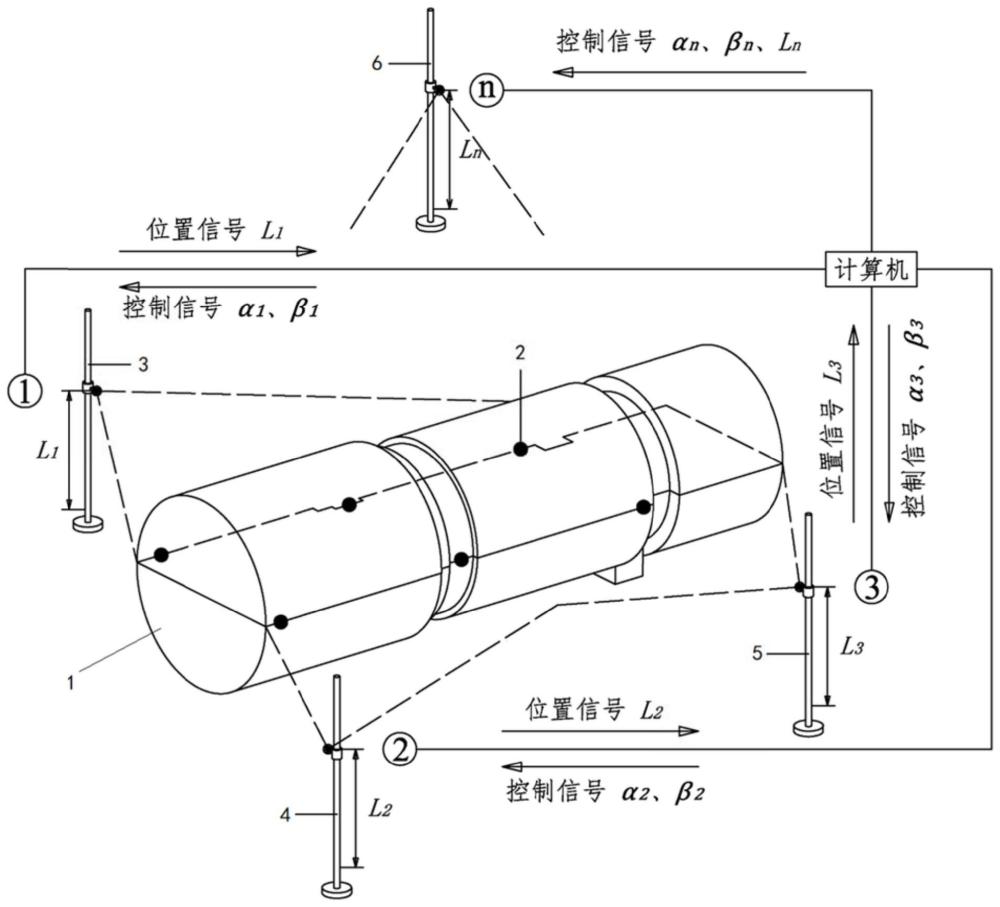
6、所述激光投线仪-导轨组件固定在地面上,使航空发动机位于所述激光投线仪的投射区域中,通过调整各个所述激光投线仪在所述线性导轨上的位置、所述激光投线仪的旋转角以及所述外支撑环的旋转角,使所述航空发动机外型上的至少3个基准特征检测点同时位于所述激光投线仪的激光投射平面上,检查所述航空发动机外型上的其他特征检测点是否均位于所述激光投射平面上,若各个特征检测点均位于所述激光投射平面上,则检测合格,若有特征检测点不在所述激光投射平面上,则在所述至少3个基准特征检测点不移动的条件下,调整所述航空发动机的机匣角向位置,使所有特征检测点均位于激光投射平面上。
7、根据本技术一种实施例,至少三组激光投线仪-导轨组件均按顺序设置编号n,n=1、2、3...;其中,编号n=1、2、3的所述激光投线仪-导轨组件按编号顺序升序呈逆时针分布固定在地面;编号n≥4的所述激光投线仪-导轨组件的设置位置为任意位置。
8、根据本技术一种实施例,还包括控制系统,所述控制系统与所述光学追踪器控制连接,用于获取所述光学追踪器捕捉到的所有所述激光投线仪的位置和方向信息;所述控制系统还分别与所述第一驱动装置、第二驱动装置和第三驱动装置控制连接,用于向驱动装置发送控制信号并获取驱动装置的位置信号。
9、根据本技术一种实施例,所述激光投线仪为可投射360°环形激光的激光投线仪。
10、本技术还提供一种航空发动机外形特征点共面检测方法,应用于上述的航空发动机外形特征点共面检测系统,包括:
11、对每个所述激光投线仪进行顺序编号,将编号为n的激光投线仪的外支撑环绕轴旋转角定义为αn,将激光投线仪绕所述内支撑环的旋转角定义为βn;对驱动装置进行校准和标定,使所述激光投线仪的激光投射平面与两根所述旋转轴线的正交平面共面时,旋转角αn=βn=0rad;
12、将光学追踪器确立的坐标系定义为世界坐标系oxyz,将所述光学追踪器检测到的编号为n的激光投线仪的六自由度形成的坐标系定义为局部坐标系onxnynzn;对所述光学追踪器和检测系统软件程序进行校准,对所述激光投线仪的特性标记点进行校准和标定,其中,所述外支撑环的旋转轴线作为局部坐标系的x轴,所述激光投线仪相对于所述内支撑环的旋转轴线作为局部坐标系的y轴,所述激光投线仪的外壳几何中心为原点;
13、通过驱动装置控制所述激光投线仪在所述线性导轨上运动,获取并解析计算所述激光投线仪在所述线性导轨上各个位置处的位置参数,通过调整所有所述激光投线仪的旋转角αn和βn,以及控制编号n≥4的所述激光投线仪的位置参数,将所有激光投线仪的激光投射平面调整至共面;
14、将航空发动机移入各个所述激光投线仪的投射区域中,调整各个所述激光投线仪在所述线性导轨上的位置参数,使所述航空发动机外型上的至少3个基准特征检测点同时位于激光投射平面上,检查其他特征检测点是否均位于激光投射平面上,若各个特征检测点均位于激光投射平面上,则检测合格,若有特征检测点不在所述激光投射平面上,则在所述至少3个基准特征检测点不移动的条件下,调整所述航空发动机的机匣角向位置,使所有特征检测点均位于激光投射平面上。
15、根据本技术一种实施例,获取并解析计算所述激光投线仪在所述线性导轨上各个位置处的位置参数,包括:
16、通过驱动装置控制所述激光投线仪在所述线性导轨上运动,根据所述激光投线仪在所述线性导轨的下止点和上止点时的局部坐标系onxnynzn的原点坐标与世界坐标系oxyz的关系,获取所述激光投线仪的运动轨迹直线方程;根据所述运动轨迹直线方程,获取并解析计算编号n=1、2、3的所述激光投线仪在所述线性导轨上各个位置处的位置参数;
17、计算由编号n=1、2、3的所述激光投线仪的几何中心确定的平面方程,通过所述平面方程与编号n≥4的所述激光投线仪在所述线性导轨上的运动轨迹直线方程,联立求解获得编号n≥4的所述激光投线仪在所述线性导轨上各个位置处的位置参数。
18、根据本技术一种实施例,通过调整所有所述激光投线仪的旋转角αn和βn,以及控制编号n≥4的所述激光投线仪的位置参数,将所有激光投线仪的激光投射平面调整至共面,包括:
19、根据向量外积的定义确定世界坐标系oxyz中点pn(n=1,2,3…)的坐标为(xpn,ypn,zpn),使向量垂直于平面o1o2o3;其中,o1、o2、o3分别为编号n=1、2、3的所述激光投线仪的几何中心,所述平面o1o2o3为由编号n=1、2、3的所述激光投线仪的几何中心确定的平面;
20、将局部坐标系onxnynzn先绕xn轴旋转αn角,再绕yn轴旋转βn角,使zn轴与向量平行;
21、实时解析计算所述激光投线仪在所述线性导轨上各个位置处需要旋转的旋转角αn和旋转角βn的角度;
22、当所述激光投线仪-导轨组件的数量为3组时,控制所述激光投线仪旋转至旋转角αn,控制所述外支撑环旋转至旋转角βn,使所有激光投线仪的激光投射平面调整至共面;
23、当所述激光投线仪-导轨组件的数量大于3组时,控制所述激光投线仪旋转至旋转角αn,控制所述外支撑环旋转至旋转角βn,同时通过控制编号n≥4的所述激光投线仪的位置参数,使所有激光投线仪的激光投射平面调整至共面。
24、根据本技术一种实施例,所述旋转角αn、旋转角βn的方向遵守坐标系右手定则。
25、与现有技术相比,本说明书实施例采用的上述至少一个技术方案能够达到的有益效果至少包括:本发明实施例利用传感器技术、光学追踪技术和计算机技术进行测量和分析计算,实现了检测航空发动机外形特征点是否共面并指导机匣角向位置调整的功能。
本文地址:https://www.jishuxx.com/zhuanli/20240730/153707.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表