一种圆柱体表面纹理及三维形貌测量方法和装置
- 国知局
- 2024-07-30 10:45:08
本发明涉及三维测量,尤其是涉及一种圆柱体表面纹理及三维形貌测量方法和装置。
背景技术:
1、三维测量技术在航空航天、精密加工、智能制造等领域都有广泛的应用,其中,光学三维测量技术以前沿的光学、电子学及计算机图像处理技术为依托,实现了对物体表面形状与轮廓的高精度、快速、非接触测量。这种技术不仅在科研领域取得了显著的成果,还广泛应用到工业生产的各个环节,为提升国家工业生产水平、推动智能制造的快速发展提供了强有力的技术支撑。
2、对于圆柱体目标的光学三维形貌精密检测,特别是圆柱体内壁的光学三维形貌精密检测,常用的方法包括线激光、双相机立体视觉和结构光方法,上述方案存在以下问题:
3、线激光三维检测技术利用三角测距法,通过精确计算发射激光光斑与反射激光光斑之间的位置差异,从而获取物体的三维形貌数据。这种方法在应用中存在一些局限性,线激光存在遮挡只能测深度较小的孔,且无法实现360°全角度检测。
4、双相机立体视觉通过同一物体在两个相机中的图像位置差异,结合相机空间坐标,还原物体三维形貌。此方法需要两个相机存在一定空间位置差异,测量系统体积很大,且相机一般需要从两个角度拍同一个物体,不能用于测内孔。
5、结构光需要投影图案到被测物体,并通过解析投影图案在物体表面的变化测量物体三维形貌。结构光可以将被测物体放置于旋转台上实现对圆柱体物体的360°全角度测量。但仅适用于较平坦的物体,同时也存在体积大无法检测内孔的问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在无法全角度、高精度测量圆柱体、圆柱孔内外壁纹理和三维形貌的缺点而提供一种圆柱体表面纹理及三维形貌测量方法和装置。
2、本发明的目的可以通过以下技术方案来实现:
3、一种圆柱体表面纹理及三维形貌测量方法,包括以下步骤:
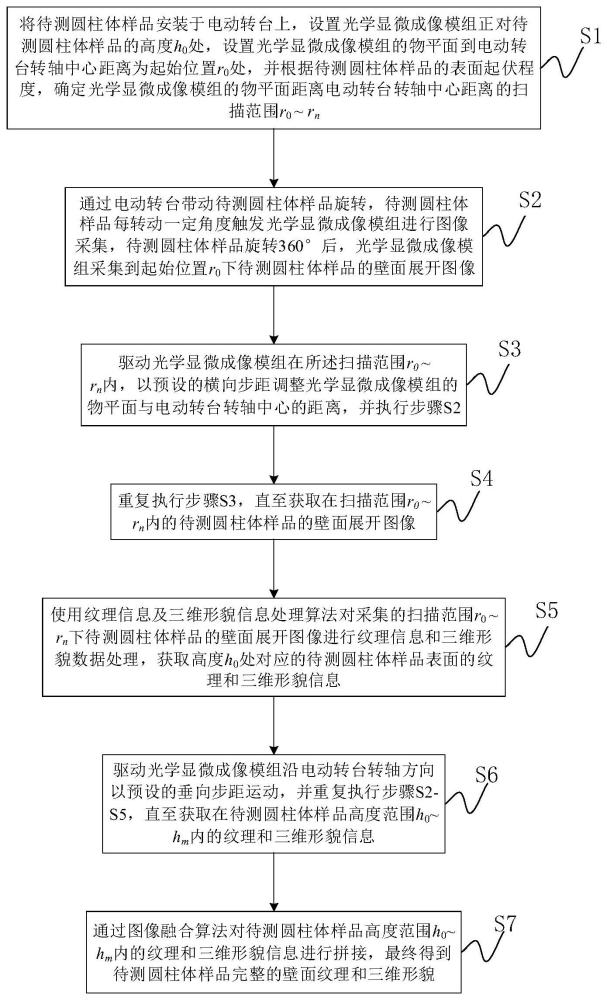
4、s1:将待测圆柱体样品安装于电动转台上,设置光学显微成像模组正对待测圆柱体样品的高度h0处,设置光学显微成像模组的物平面到电动转台转轴中心距离为起始位置r0处,并根据待测圆柱体样品的表面起伏程度,确定光学显微成像模组的物平面距离电动转台转轴中心距离的扫描范围r0~rn;
5、s2:通过电动转台带动待测圆柱体样品旋转,待测圆柱体样品每转动一定角度触发光学显微成像模组进行图像采集,待测圆柱体样品旋转360°后,光学显微成像模组采集到起始位置r0下待测圆柱体样品的壁面展开图像;
6、s3:驱动光学显微成像模组在所述扫描范围r0~rn内,以预设的横向步距调整光学显微成像模组的物平面与电动转台转轴中心的距离,并执行步骤s2;
7、s4:重复执行步骤s3,直至获取在扫描范围r0~rn内的待测圆柱体样品的壁面展开图像;
8、s5:使用纹理信息及三维形貌信息处理算法对采集的扫描范围r0~rn下待测圆柱体样品的壁面展开图像进行纹理信息和三维形貌数据处理,获取高度h0处对应的待测圆柱体样品表面的纹理和三维形貌信息;
9、s6:驱动光学显微成像模组沿电动转台转轴方向以预设的垂向步距运动,并重复执行步骤s2-s5,直至获取在待测圆柱体样品高度范围h0~hm内的纹理和三维形貌信息;
10、s7:通过图像融合算法对待测圆柱体样品高度范围h0~hm内的纹理和三维形貌信息进行拼接,最终得到待测圆柱体样品完整的壁面纹理和三维形貌。
11、进一步地,所述光学显微成像模组通过快速自动对焦算法,将物平面定位到待测圆柱体样品的表面;然后根据待测圆柱体样品的表面起伏程度,确定光学显微成像模组的物平面距离电动转台转轴中心的扫描范围;所述快速自动对焦算法包括以下步骤:
12、对于待测圆柱体样品中待对焦的某一位置(h,θ),在每次光学显微成像模组进行图像采集后,均对该位置(h,θ)的图像数据计算显著度评价函数值,并记录对应的光学显微成像模组的物平面距离电动转台转轴中心的距离r;其中,h为待测圆柱体样品的高度,θ为待测圆柱体样品的转动角度;
13、获取当前位置(h,θ)对应的显著度评价函数值极值位置所对应的位置r,作为光学显微成像模组的物平面和待测圆柱体样品表面重合的最佳位置r;
14、当光学显微成像模组采集待测圆柱体样品在位置(h,θ)的图像时,将光学显微成像模组的物平面移动到距离电动转台转轴中心r位置处,实现快速自动对焦。
15、进一步地,所述纹理信息的处理过程包括以下步骤:
16、对待测圆柱体样品旋转过程中,采集到的原始图像序列中的每一张图in进行多尺度分解,分解为分别包含不同频率分量的子图像其中为图像序号,c∈[2,c]为分量标号,c为分解层次,h×w为图像尺寸;
17、通过显著度评价函数对各个图像分量进行评价,根据评价结果构建融合权重图其中,且
18、通过滤波函数,对融合权重图中相关程度高、位置毗邻的权重值进行交叉优化,以提升融合权重图的整体信噪比和各子区域的信噪比;
19、利用优化后的融合权重图对多尺度分解的图像序列进行加权融合,得到融合纹理图像
20、所述加权融合过程包括:
21、根据每一个子图像和其对应的权重图计算融合分量通过特征空间变换函数的逆变换,对各个融合分量重组,得到所述融合纹理图像所述融合分量的计算表达式为:
22、
23、式中,(x,y)是像素位置,wi,j(x,y)是位置(x,y)处图像分量i、j的融合权重,ii,j(x,y)是位置(x,y)处图像分量i、j的像素值。
24、进一步地,所述三维形貌数据的处理过程包括以下步骤:
25、将待测圆柱体样品旋转过程中,采集到的原始图像序列构成图像立方体为其中h、w分别代表图像的高和宽;通过显著度评价函数对图像立方体carig进行像素级或窗口级显著度评价,得到初始显著度评价立方体
26、采用经过纹理信息分析获取的融合纹理图像为初始显著度评价立方体提供颜色、形状、距离上的先验信息,应用边缘保持的引导式滤波方法,对初始显著度评价立方体进行优化,从而得到修正显著度评价立方体
27、对修正显著度评价立方体中的每个像素位置(i,j),从n个图像序列中提取显著度评价值形成集合{v1,v2,…,vn},对该集合进行处理,建立显著度评价曲线curveij=vk,其中k∈[1,n];对显著度评价曲线curveij进行拟合,标记拟合后曲线最大显著度值对应的位置,该位置对应于图像立方体carig在沿光轴方向上的深度,从而形成初始深度图dinit;
28、采用显著度评价值及其与初始深度图dinit的相关性,构建初始地形图置信度信息,该初始地形图置信度信息被编码为二值蒙版m;利用融合纹理图像作为特征图,并依据二值蒙版m指定待处理区域,对初始深度图dinit进行加权中值滤波处理,从而区分并处理强纹理区域与弱纹理区域,得到最终修正的地形图dfinal。
29、进一步地,所述显著度评价函数基于灰度方差函数、空间频率函数或修正拉普拉斯和函数进行计算,所述灰度方差函数的计算表达式为:
30、
31、式中,variance为灰度方差函数,m×n为图像大小,(x,y)是像素位置,μ是图像灰度值的均值;
32、所述空间频率函数的计算表达式为:
33、
34、式中,sf为空间频率函数,rf和cf分别是行频率和列频率:
35、所述修正拉普拉斯和函数的计算表达式为:
36、
37、式中,sml为修正拉普拉斯和函数,t是判别阈值,n是窗口大小,为修正拉普拉斯算子ml的离散近似函数。
38、进一步地,步骤s2与步骤s3同时执行,当电动转台以角速度ω带动待测圆柱体样品旋转时,驱动光学显微成像模组从起始位置开始以速度ω/2π×δr进行移动,调整光学显微成像模组的物平面距离电动转台转轴中心的距离。
39、本发明还提供一种实现如上所述的一种圆柱体表面纹理及三维形貌测量方法的装置,包括光学显微成像模组、电动转台、沿轴扫描机构和垂直扫描机构;
40、所述光学显微成像模组用于实时采集集待测圆柱体样品表面图像,所述光学显微成像模组的成像清晰度和所述待测圆柱体样品表面与光学显微成像模组物平面的距离相关;
41、所述电动转台用于带动待测圆柱体样品旋转,使得光学显微成像模组能360°全角度采集待测圆柱体样品表面图像;
42、所述沿轴扫描机构用于驱动光学显微成像模组,使得光学显微成像模组的物平面沿光轴方向前后移动;
43、所述垂直扫描机构用于带动光学显微成像模组在垂直方向移动,实现对待测圆柱体样品不同高度位置处的图像采集。
44、进一步地,所述光学显微成像模组包括显微物镜、套筒镜头、线阵相机和照明模块:
45、所述显微物镜安装在光学显微成像模组前部,用于采集待测圆柱体样品表面反射的光信号,并投射到套筒镜头;
46、所述套筒镜头安装在显微物镜后,用于将显微物镜投射的光信号传递到线阵相机;
47、所述线阵相机安装于套筒镜头的后方,所述线阵相机的感光面处在套筒镜头的像平面位置处,用于接收光信号并转化为电信号,生成线阵图像数据,供信息计算处理系统对所述线阵图像数据进行分析处理;
48、所述照明模块用于提供光照环境。
49、进一步地,所述照明模块为同轴照明组件、环形照明组件中的一种或多种,所述同轴照明组件包括设置在显微物镜和套筒镜头中间的分光镜,该分光镜的反射方向上设有同轴光源;所述环形照明组件包括安装在显微物镜上的环形光源;
50、所述线阵相机为灰度或彩色线阵相机。
51、进一步地,所述装置还包括反射镜或折转棱镜,用于弯折显微物镜所在的光路和缩小显微物镜的直径,以适用于圆柱体内壁的三维形貌测量。
52、与现有技术相比,本发明具有以下优点:
53、(1)本发明可以用于检测圆柱体、圆柱孔的内外壁表面纹理和三维形貌检测,检测数据多样,可包括彩色纹理信息、3d形貌信息;基于显著度的计算,快速定位待测样品的表面;通过纹理信息及三维形貌信息处理算法获得待测圆柱体样品表面的纹理和三维形貌信息;通过沿电动转台转轴方向扫描和图像融合算法,实现对不同高度的待测样品的检测,解决了行业内无法精确测量圆柱体、圆柱孔内外壁纹理和三维形貌的痛点。
54、(2)本发明提出的对于圆柱体、圆柱孔内外壁纹理信息以及三维形貌信息的检测方法,可以实现360°全方位检测,无检测死角。图像显著度评价手段更加科学,纹理和三维形貌处理算法更合理,计算速度更快,计算精度更高。
55、(3)通过在光学显微成像模组的光路中设置反射镜等进行光路折转布局,优化其工作空间,使其能够检测小口径圆柱孔内壁,以及在一些空间受限的环境中进行工作,适用性强。
56、(4)本发明使用多种照明方式为测试提供所需的光照环境,对于待测物体的表面材质、纹理、形貌无严格要求,可适配更多的检测对象和检测场景。
本文地址:https://www.jishuxx.com/zhuanli/20240730/154106.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。