沉管浮运安装时船管连接姿态的监测方法与流程
- 国知局
- 2024-07-30 10:58:18
本发明属于沉管隧道施工,具体涉及一种沉管浮运安装时船管连接姿态的监测方法。
背景技术:
1、目前在沉管隧道的建设中,创新性地采用一体船进行沉管管节的浮运及安装。参考图1所示,先利用横向定位缆索、纵向定位缆索及支墩等将沉管2连接于一体船1下方,然后一体船1航行以将沉管2浮运至待安装区域上方,再利用沉放缆索将沉管2沉放至待安装区域的基床上,期间利用移船缆索调整一体船1船位,并利用沉管2测量塔上的gps设备对沉管2进行定位,以使沉管2准确沉放对接。
2、然而,在一体船1浮运安装沉管2过程中,一体船1和沉管2均会受到海浪等因素影响,出现各种摇摆运动,会影响一体船1与沉管2之间连接的稳定性和安全性,进而影响沉管2浮运安装时的可靠性、安全性和施工精度;但现有技术对船管连接情况鲜有实质性关注和切实有效的监测。有鉴于此,有必要对沉管2浮运安装时的船管连接姿态进行监测。
技术实现思路
1、针对相关技术中存在的不足之处,本发明提供一种沉管浮运安装时船管连接姿态的监测方法,旨在对沉管浮运安装时的船管连接姿态进行实时监测,确保船管连接的稳定性和安全性。
2、本发明提供一种沉管浮运安装时船管连接姿态的监测方法,用于对沉管浮运及安装时一体船与沉管的连接姿态进行实时监测,包括以下步骤:
3、监测点组布设,具体包括:
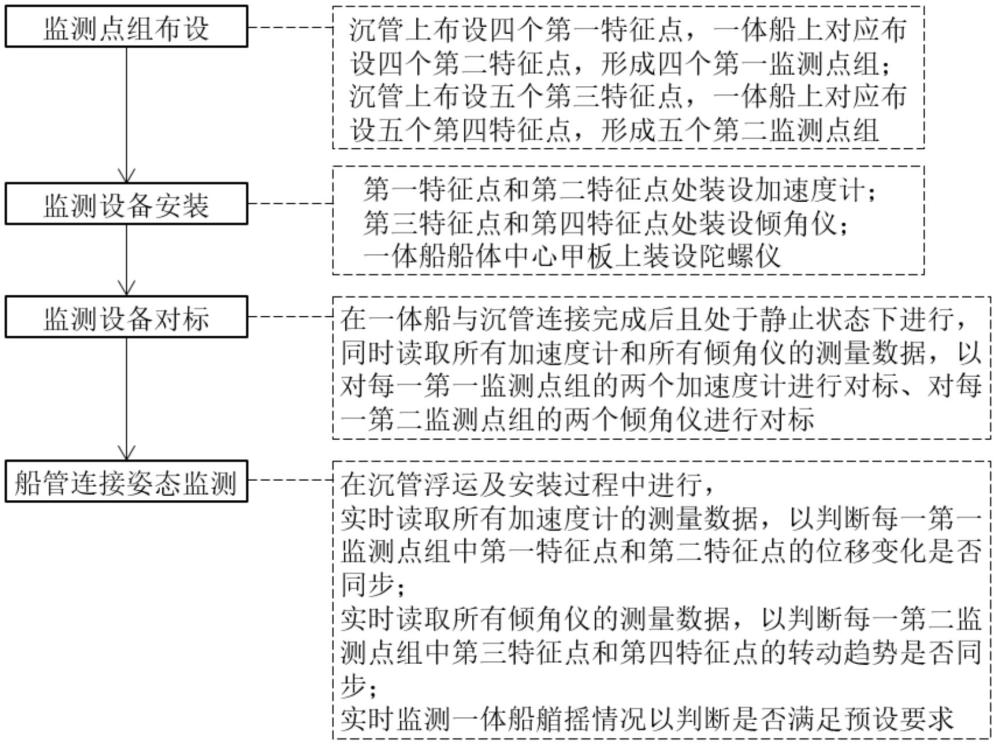
4、分别在沉管左右车道长度方向两端的外墙上布设第一特征点,分别在一体船左右船舷长度方向两端的甲板上布设第二特征点,四个第二特征点与四个第一特征点一一对应,以形成四个第一监测点组;
5、分别在沉管左右车道长度方向中部的外墙上、沉管中廊道长度方向两端及中部的侧壁上布设第三特征点,分别在一体船左右船舷长度方向中部的甲板上、一体船船艏及船艉中部的甲板上、船体中心的甲板上布设第四特征点,五个第四特征点与五个第三特征点一一对应,以形成五个第二监测点组;
6、监测设备安装,在每一第一特征点和第二特征点处装设加速度计,以实时测量每一第一特征点和第二特征点处的升沉、横荡和纵荡数据;在每一第三特征点和第四特征点处装设倾角仪,以实时测量每一第三特征点和第四特征点处的纵摇和横摇数据;
7、船管连接姿态监测,在沉管浮运及安装过程中进行,实时读取并显示所有加速度计的测量数据,以判断每个第一监测点组中第一特征点和第二特征点的位移变化是否同步;实时读取并显示所有倾角仪的测量数据,以判断每个第二监测点组中第三特征点和第四特征点的转动趋势是否同步;若均同步,则继续沉管的浮运或安装;若任一不同步,则暂停沉管的浮运或安装,触发异常警报以提示人工介入进行原因排查。
8、在其中一些实施例中,在监测设备安装步骤完成后,还包括监测设备对标步骤;监测设备对标步骤在一体船与沉管连接完成后且处于静止状态下进行,具体为,同时读取所有加速度计和所有倾角仪的测量数据,以对每个第一监测点组的两个加速度计进行对标、对每个第二监测点组的两个倾角仪进行对标。
9、在其中一些实施例中,在船管连接姿态监测步骤中,利用加速度计的测量数据,通过分析第一监测点组中第一特征点和第二特征点的运动周期是否一致、相位是否一致、幅值差距是否小于预设偏差要求,来判断该第一监测点组中第一特征点和第二特征点的位移变化是否同步;利用倾角仪的测量数据,通过分析第二监测点组中第三特征点和第四特征点的运动周期是否一致、相位是否一致、幅值差距是否小于预设偏差要求,来判断该第二监测点组中第三特征点和第四特征点的转动趋势是否同步。
10、在其中一些实施例中,当任一第一监测点组中第一特征点和第二特征点的运动周期不一致、相位不一致或幅值差距超过预设偏差要求,或任一第二监测点组中第三特征点和第四特征点的运动周期不一致、相位不一致或幅值差距超过预设偏差要求时,则触发异常警报,人工介入进行原因排查;排查方向包括但不限于各缆索的缆力、沉管内压载水箱的密封性、沉管端封门的密封性、一体船压载水量的配置。
11、在其中一些实施例中,加速度计为超低频磁电式振动加速度传感器,其最低测振频率为0.05hz。
12、在其中一些实施例中,超低频磁电式振动加速度传感器用于对第一特征点及第二特征点进行x、y、z三个方向的加速度测量,加速度滤波积分后解算得到第一特征点及第二特征点的纵荡、横荡、升沉数据。
13、在其中一些实施例中,在一体船船体中心的甲板上还装设有陀螺仪;在沉管浮运及安装过程中,利用陀螺仪来实时监测一体船的艏摇情况。
14、在其中一些实施例中,在利用陀螺仪实时监测一体船的艏摇情况时,实时读取陀螺仪的测量数据,并采用配合沉管测量塔上gps设备的导向方式,利用卡尔曼滤波对陀螺仪进行漂移补偿,进而获得一体船的艏摇数据。
15、基于上述技术方案,本发明实施例中的沉管浮运安装时船管连接姿态的监测方法,能够对沉管浮运安装时的船管连接姿态进行实时监测,以确保船管连接的稳定性和安全性,确保一体船和沉管达到预期的共同运动特性,进而保证沉管浮运安装时的可靠性、安全性和施工精度。
技术特征:1.沉管浮运安装时船管连接姿态的监测方法,用于对沉管浮运及安装时一体船与沉管的连接姿态进行实时监测,其特征在于,包括以下步骤:
2.根据权利要求1所述的沉管浮运安装时船管连接姿态的监测方法,其特征在于,在所述监测设备安装步骤完成后,还包括监测设备对标步骤;所述监测设备对标步骤在一体船与沉管连接完成后且处于静止状态下进行,具体为,同时读取所有所述加速度计和所有倾角仪的测量数据,以对每个所述第一监测点组的两个加速度计进行对标、对每个所述第二监测点组的两个倾角仪进行对标。
3.根据权利要求2所述的沉管浮运安装时船管连接姿态的监测方法,其特征在于,在所述船管连接姿态监测步骤中,利用所述加速度计的测量数据,通过分析所述第一监测点组中第一特征点和第二特征点的运动周期是否一致、相位是否一致、幅值差距是否小于预设偏差要求,来判断该所述第一监测点组中第一特征点和第二特征点的位移变化是否同步;利用所述倾角仪的测量数据,通过分析所述第二监测点组中第三特征点和第四特征点的运动周期是否一致、相位是否一致、幅值差距是否小于预设偏差要求,来判断该所述第二监测点组中第三特征点和第四特征点的转动趋势是否同步。
4.根据权利要求3所述的沉管浮运安装时船管连接姿态的监测方法,其特征在于,当任一所述第一监测点组中第一特征点和第二特征点的运动周期不一致、相位不一致或幅值差距超过预设偏差要求,或任一所述第二监测点组中第三特征点和第四特征点的运动周期不一致、相位不一致或幅值差距超过预设偏差要求时,则触发异常警报,人工介入进行原因排查;排查方向包括但不限于各缆索的缆力、沉管内压载水箱的密封性、沉管端封门的密封性、一体船压载水量的配置。
5.根据权利要求1所述的沉管浮运安装时船管连接姿态的监测方法,其特征在于,所述加速度计为超低频磁电式振动加速度传感器,其最低测振频率为0.05hz。
6.根据权利要求5所述的沉管浮运安装时船管连接姿态的监测方法,其特征在于,所述超低频磁电式振动加速度传感器用于对第一特征点及第二特征点进行x、y、z三个方向的加速度测量,加速度滤波积分后解算得到第一特征点及第二特征点的纵荡、横荡、升沉数据。
7.根据权利要求1所述的沉管浮运安装时船管连接姿态的监测方法,其特征在于,在一体船船体中心的甲板上还装设有陀螺仪;在沉管浮运及安装过程中,利用所述陀螺仪来实时监测一体船的艏摇情况。
8.根据权利要求7所述的沉管浮运安装时船管连接姿态的监测方法,其特征在于,在利用所述陀螺仪实时监测一体船的艏摇情况时,实时读取所述陀螺仪的测量数据,并采用配合沉管测量塔上gps设备的导向方式,利用卡尔曼滤波对陀螺仪进行漂移补偿,进而获得一体船的艏摇数据。
技术总结本发明属于沉管隧道施工技术领域,涉及一种沉管浮运安装时船管连接姿态的监测方法。该方法包括:监测点组布设,在沉管左右车道两端布设第一特征点,在一体船左右船舷两端布设与第一特征点一一对应的第二特征点,形成四个第一监测点组,在沉管左右车道中部、中廊道两端及中部布设第三特征点,在一体船左右船舷中部、船艏及船艉中部、船体中心布设与第三特征点一一对应的第四特征点,形成五个第二监测点组;监测设备安装,第一及第二特征点处设加速度计,第三及第四特征点处设倾角仪;船管连接姿态监测,实时读取所有加速度计的测量数据以判断每个第一监测点组中第一和第二特征点的位移变化是否同步;实时读取所有倾角仪的测量数据以判断每个第二监测点组中第三和第四特征点的转动趋势是否同步。本发明能实时监测沉管浮运安装时船管连接姿态,确保船管连接的稳定性和安全性。技术研发人员:寇晓强,房宇航,刘馨,陈智军,冯帅,岳长喜,侯佳,宋博文,苏忠纯受保护的技术使用者:中交第一航务工程局有限公司技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/155004.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。