路面不平度的检测方法、检测装置及检测设备
- 国知局
- 2024-07-30 11:00:09
本申请涉及科研工程,尤其涉及一种路面不平度的检测方法、检测装置及检测设备。
背景技术:
1、履带车辆在多个领域占据着举足轻重的地位,其出色的性能和优越的机动性对于确保任务的顺利执行具有至关重要的意义。履带车辆需要在多种复杂多变的战场环境中灵活穿梭并完成既定任务,包括崎岖的山地、密集的城市街道以及茂密的林地等。然而,不同地形条件下的复杂性和差异性会对履带车辆的行驶性能和稳定性产生显著影响。
技术实现思路
1、本发明的主要目的在于提供一种路面不平度的检测方法,旨在优化履带车辆的行驶策略,提高性能,同时可以减轻乘员的工作负担,提高作战效率。
2、为实现上述目的,本发明提供一种路面不平度的检测方法,应用于履带车,所述履带车包括激光雷达、陀螺仪、加速度计和里程计,所述陀螺仪用于获取姿态信息,所述里程计用于获取车辆位置信息,所述检测方法包括:
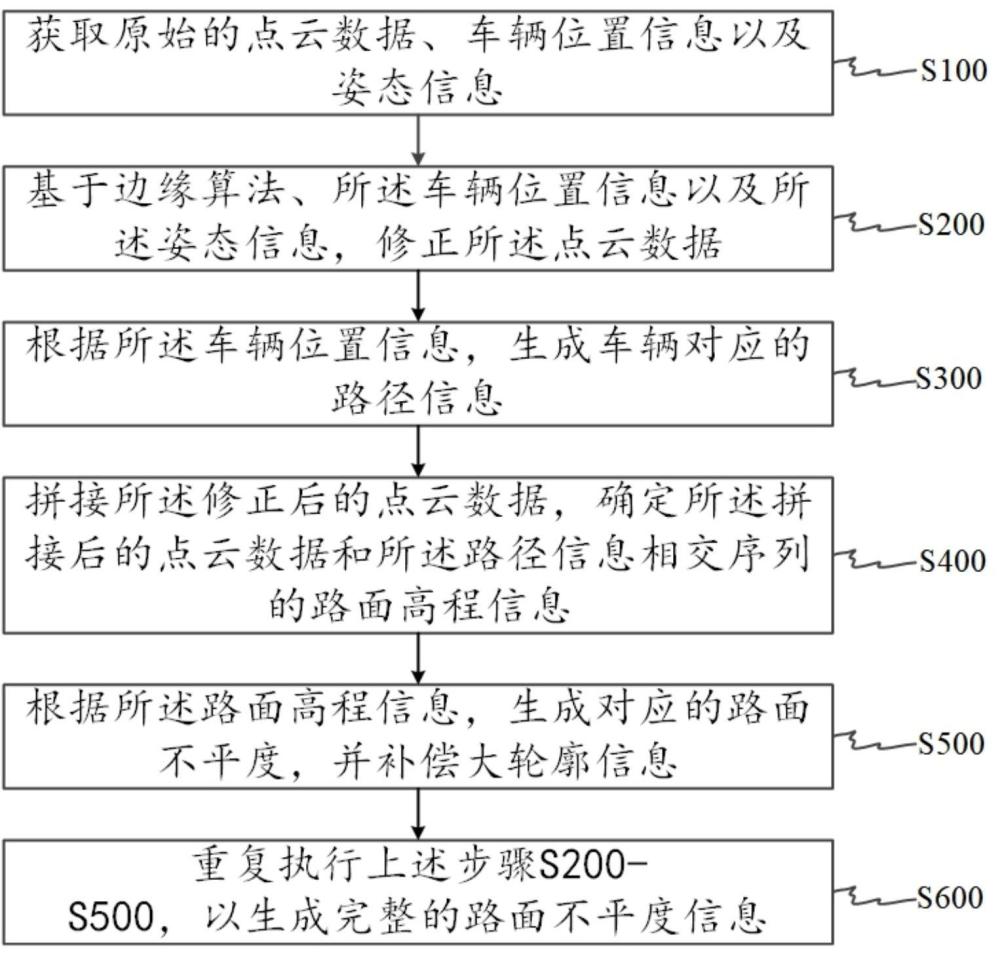
3、获取原始的点云数据、车辆位置信息以及姿态信息;
4、基于边缘算法、所述车辆位置信息以及所述姿态信息,修正所述点云数据;
5、根据所述车辆位置信息,生成车辆对应的路径信息;
6、拼接所述修正后的点云数据,确定所述拼接后的点云数据和所述路径信息相交序列的路面高程信息;
7、根据所述路面高程信息,生成对应的路面不平度,并补偿大轮廓信息;
8、重复执行上述步骤,以生成完整的路面不平度信息。
9、在一实施方式中,所述履带车包括激光雷达,所述激光雷达用于获取原始的点云数据,所述激光雷达水平视场范围大于180°,垂直视场范围为θ,以雷达中心线为0线,垂直视场范围为θ1~θ2;
10、所述获取原始的点云数据的步骤中,所述θ应满足如下表达式:
11、;
12、设所述激光雷达有效距离为 l,所述 l应满足如下表达式:
13、;
14、式中,为激光雷达与地面所呈夹角,h为激光雷达距地面的垂直高度;
15、设车辆宽度为b,则应满足如下表达式:
16、;
17、则激光雷达在车辆前进方向的有效探测范围为:
18、;
19、使得趋于0。
20、在一实施方式中,所述获取车辆位置信息以及姿态信息的步骤,包括:
21、获取陀螺仪采集到的角速度信息、加速度计采集到的加速度信息、里程计在车辆坐标系下采集的车轮速度信息以及里程计在车辆坐标系下采集的车辆状态信息;
22、解算所述角速度信息以及所述加速度信息,生成履带车辆的位移、姿态以及速度;
23、解算所述车轮速度信息以及所述车辆状态信息,生成对应的车体角度以及车体位移;
24、基于eskf融合所述位移、所述姿态、所述速度、所述车体角度以及所述车体位移,预测所述履带车辆的状态,建立对应的误差方程;
25、根据所述误差方程、所述车体角度以及所述车体位移,校正当前履带车辆的行驶距离以及速度,以生成观测方程,并确定出观测残差;
26、根据所述观测残差,确定车辆的姿态信息。
27、在一实施方式中,所述激光雷达安装于所述履带车的车体上;
28、所述基于边缘算法、所述车辆位置信息以及所述姿态信息,修正所述点云数据的步骤,包括:
29、预处理原始的点云数据;
30、基于布模拟滤波以及统计滤波,去除所述处理后的点云数据的非地面点和离群点;
31、根据所述车辆位置信息以及所述姿态信息,生成激光雷达的雷达姿态信息;
32、基于所述边缘算法,将所述雷达姿态信息的四元数进行球面线性插值转化,以修正所述点云数据。
33、在一实施方式中,所述拼接所述修正后的点云数据的步骤,包括:
34、获取多个预设间隔时长的点云;
35、基于第一算法,配准多个所述点云,按照时间顺序融合相邻时刻的两个所述点云的重叠部分,以生成对应的新特征点,直至将最后时刻获取的所述点云进行拼接。
36、在一实施方式中,所述确定所述拼接后的点云数据和所述路径信息相交序列的路面高程信息的步骤,包括:
37、建立车辆位置信息以及姿态信息的数学模型;
38、以里程计对所述陀螺仪的偏航数据和所述加速度计的偏航数据进行修正,当履带车辆的状态为停止时,消除所述里程计、所述陀螺仪以及所述加速度计随时间的累计误差,并推演所述履带车辆的车辆轨迹;
39、基于八叉树算法索引所述拼接后的点云数据,检测生成多个相交点;
40、按照履带车辆行驶的时间顺序或空间顺序排列多个所述相交点,生成对应的相交序列;
41、提取所述相交序列中车辆左轮与点云的第一相交序列、车辆右轮与点云的第二相交序列以及车辆两轮中心与点云的第三相交序列;
42、基于克里金插值算法,高程估计所述第一相交序列、所述第二相交序列以及所述第三相交序列中的所有位置,以生成路面高程信息的连续表面,确定所述路面高程信息。
43、在一实施方式中,所述根据所述路面高程信息,生成对应的路面不平度,并补偿大轮廓信息的步骤,包括:
44、当所述相交序列中出现大块缺失的点云数据时,判断为大轮廓信息;
45、基于三次样条插值和所述大轮廓信息,确定道路的高程曲线,以生成履带车辆的主动悬挂的路面输入;
46、根据路面不平度公式以及所述路面输入,生成所述路面不平度。
47、在一实施方式中,所述重复执行上述步骤,以生成完整的路面不平度信息的步骤,包括:
48、重新获取多个车辆位置信息以及多个姿态信息;
49、基于所述边缘算法对新的多个所述车辆位置信息以及新的多个姿态信息进行运算,以得到多个轮廓信息;
50、记录多个所述轮廓信息,并对多个所述轮廓信息进行分析,以生成完整的路面不平度信息。
51、此外,为实现上述目的,本发明还提供一种检测装置,所述检测装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的路面不平度的检测程序,所述路面不平度的检测程序配置为实现如上所述的路面不平度的检测方法。
52、此外,为实现上述目的,本发明还提供一种检测设备,包括如上所述的检测装置。
53、本发明实施例通过基于边缘算法、车辆位置信息以及姿态信息,对原始的点云数据进行修正,将修正后的点云数据进行拼接,再根据车辆位置信息,生成车辆对应的路径信息,从而确定拼接后的点云数据和路径信息相交序列的路面高程信息,并根据路面高程信息,生成对应的路面不平度,并补偿大轮廓信息,从而成完整的路面不平度信息,有助于车辆适应这些复杂地形,提高性能,也可以减轻乘员的工作负担,提高作战效率,有助于提高车辆的智能性。
技术特征:1.一种路面不平度的检测方法,应用于履带车,所述履带车包括激光雷达、陀螺仪、加速度计和里程计,所述陀螺仪用于获取姿态信息,所述里程计用于获取车辆位置信息,其特征在于,所述检测方法包括:
2.根据权利要求1所述的路面不平度的检测方法,其特征在于,所述履带车包括激光雷达,所述激光雷达用于获取原始的点云数据,所述激光雷达水平视场范围大于180°,垂直视场范围为θ,以雷达中心线为0线,垂直视场范围为θ1~θ2;
3.根据权利要求1所述的路面不平度的检测方法,其特征在于,所述获取车辆位置信息以及姿态信息的步骤,包括:
4.根据权利要求1所述的路面不平度的检测方法,其特征在于,所述激光雷达安装于所述履带车的车体上;
5.根据权利要求1所述的路面不平度的检测方法,其特征在于,所述拼接所述修正后的点云数据的步骤,包括:
6.根据权利要求1所述的路面不平度的检测方法,其特征在于,所述确定所述拼接后的点云数据和所述路径信息相交序列的路面高程信息的步骤,包括:
7.根据权利要求6所述的路面不平度的检测方法,其特征在于,所述根据所述路面高程信息,生成对应的路面不平度,并补偿大轮廓信息的步骤,包括:
8.根据权利要求1所述的路面不平度的检测方法,其特征在于,所述重复执行上述步骤,以生成完整的路面不平度信息的步骤,包括:
9.一种检测装置,其特征在于,所述检测装置包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的路面不平度的检测程序,所述路面不平度的检测程序配置为实现如权利要求1至8中任一项所述的路面不平度的检测方法。
10.一种检测设备,其特征在于,包括如权利要求9所述的检测装置。
技术总结本申请提出了路面不平度的检测方法、检测装置及检测设备,属于科研工程技术领域,所述路面不平度的检测方法包括:获取原始的点云数据、车辆位置信息以及姿态信息;基于边缘算法、车辆位置信息以及姿态信息,修正点云数据;根据车辆位置信息,生成车辆对应的路径信息;拼接修正后的点云数据,确定拼接后的点云数据和路径信息相交序列的路面高程信息;根据路面高程信息,生成对应的路面不平度,并补偿大轮廓信息;重复执行上述步骤,以生成完整的路面不平度信息。本申请有助于车辆适应这些复杂地形,提高性能,也可以减轻乘员的工作负担,提高作战效率,有助于提高车辆的智能性。技术研发人员:凌启辉,刘旋,戴巨川,杨书仪,郭勇,陈盛钊,陈哲吾,李洪周,习毅受保护的技术使用者:湖南科技大学技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240730/155053.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表