一种三点速度识别定位加油机器人周期控制系统及方法与流程
- 国知局
- 2024-07-30 11:48:23
本发明涉及智能制造,具体为一种三点速度识别定位加油机器人周期控制系统及方法。
背景技术:
1、现代大型烧结、球团生产为了保障高效运行,都采用链式台车循环运行结构,台车是烧结、球铁机主要运行设备,台车由台车体、车轮、密封装置、箅条、拦板、隔热垫组成,台车也是烧结机的主要易损设备,大型烧结、球铁机配置台车近200台,每辆台车配有4个车轮,车轮的润滑直接关系到台车的寿命,及设备的作业率。由于人的生理因素,每次加油需要等地往复重复工作数百上千次,其工作重复稳定性、有效性、不可能完全一致。
2、公开号为cn201811627457.x的中国专利公开了高压隔膜压缩机及其补油系统和补油方法,包括补油油路与回油油路,两个油路并联,回油油路连接于柱塞泵与曲轴箱之间,油路中安装有溢流阀,补油油路连接于柱塞泵与油缸之间,止回阀安装于补油油路中,作用于油缸到柱塞泵的流动方向上,溢油阀的溢油压力低于柱塞泵的额定泵油压力,且随时可调,当柱塞泵内的油压高于其溢油压力时,柱塞泵便不再向油缸中补油,多余的油经溢流阀回到曲轴箱中,进而达到控制柱塞泵的补油量与补油时长的目的,从而防止柱塞泵由于补油过早或补油时间过长而导致压缩机排气量降低,以及影响膜片寿命及缸盖强度,增加压缩机耗功的问题;但该专利只是对单一设备的加油点进行补油控制,不能对移动的多台设备进行补油控制,无自动控制系统。
3、公开号为cn201410057037.8的中国专利公开了一种液压隔膜往复泵外置式可控补油结构,包括缸体、泵头、推杆、压杆、补油阀套、压盖和补油管,缸体内设有液压腔,液压腔内设有膜板、隔膜片,膜板固定在缸体上,隔膜片两端分别对应固定在膜板与泵头之间,泵头与缸体采用螺栓连接,推杆一端贯穿通过膜板延伸到液压腔内,推杆另一端安装在缸体内,补油管通过缸体底部连接到补油阀上,补油阀内设有阀芯,且在阀芯外侧设有阀芯弹簧,该专利可精准控制补油量,提高液压隔膜往复泵的稳定性和可靠性,可延长隔膜片使用寿命,且补油结构的拆装及维护保养更为简便;但该专利只是对单一设备的加油点进行补油控制,不能对移动的多台设备进行补油智能控制,且无智能控制流程。
4、上述两个专利在实际使用过程仍存在问题,因此,不满足现有的需求,对此我们提出了一种三点速度识别定位加油机器人周期控制系统及方法。
技术实现思路
1、本发明的目的在于提供一种三点速度识别定位加油机器人周期控制系统及方法,通过计算机智能控制,通过触觉系统完成计算判断,选择具体加油周期、及补油量,对烧结机、球团带焙机、环形冷却机、带式却机等设备的两侧往复摆动注油装置,结合现场工艺特点及运行工况、环境温度设定多种,加油周期、补油时间等模型,集成智慧控制系统,智能对全部台车轮轴承完成自动加补注油,替代人工加油,弥补人工高强度重复工作造成的不均匀的不足,满足轴承设计使用寿命一万小时的充分润滑要求,解决了上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种三点速度识别定位加油机器人周期控制系统,包括上位机、控制系统、补油装置、台车车轮和运行轨道,补油装置上连接有气动注油臂,气动注油臂上设有温度传感器,气动注油臂位于台车车轮行驶的运行轨道外侧,运行轨道的外侧安装有触觉传感器组,流水线台车车轮设有数百个,每个台车车轮均会经过运行轨道外侧安装的触觉传感器组,触觉传感器组分别为一号车轮触觉传感器、二号车轮触觉传感器和三号车轮触觉传感器,每个触觉传感器均与控制系统之间信号连接,控制系统与上位机之间信号连接,通过采集每个台车车轮经过三个触觉传感器的瞬时信号,便于plc计算出台车车轮的运行速度和到达加油机器人位置的准确时间,以满足流水线上每个台车车轮智能加油的信号采集。
3、进一步地,所述触觉传感器组为一组三件设置,每件触觉传感器之间设置的距离相等。
4、进一步地,所述控制系统,包括:
5、压力监测模块,分别与一号车轮触觉传感器、二号车轮触觉传感器和三号车轮触觉传感器之间信号连接,用于对台车车轮的位置进行监测;
6、控制模块,用于控制气动注油臂进行注油润滑的工作;
7、循环模块,用于实现自动周期性加油,以保障台车车轮各种工况的润滑要求;
8、温度监测模块,与上位机之间信号连接,用于获取温度传感器所监测到的温度数据,温度传感器检测台车车轮工作环境温度。
9、一种三点速度识别定位加油机器人周期控制系统的控制方法,包括以下步骤:
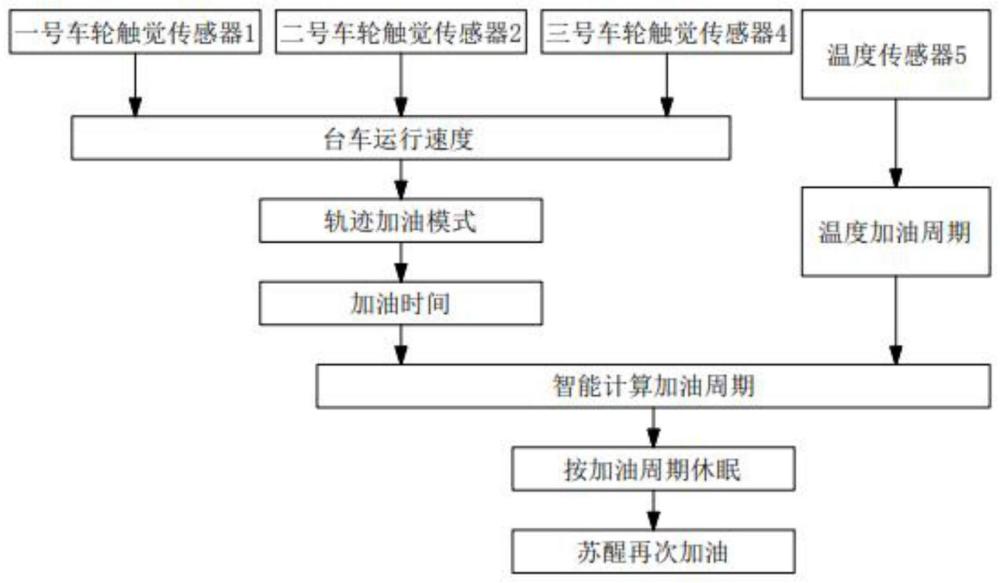
10、步骤一:通过触觉传感器组,识别每个台车车轮的速度及到达加油的准确位置,同时完成计算判断给出每个台车车轮的运行速度,及每个台车车轮到达加油位置的准确时间点;
11、步骤二:根据每个台车车轮在运行轨道上的运行轨迹的不同计算不同加油时间,以此对每个经过的台车车轮进行注油润滑,而注油时间量根据识别实时运行速度进行智能选择;
12、步骤三:完成本次全部台车车轮的加油,同时结合当期烧结机工作的环境温度,智能选择下次补油装置的工作周期,温度检测通过气动注油臂前端的温度传感器检测台车车轮工作环境温度。
13、进一步地,所述台车车轮的实时运行速度,如下式表示:
14、
15、其中,l为触觉传感器组检测点之间固定距离,三个触觉传感器距离相等;
16、t为台车车轮经过一号车轮触觉传感器到二号车轮触觉传感器检测点时间;
17、补油装置行程为l,补油装置总时间t(总)=l/v,注油装置注油时间t(油)=t(s)-δt;
18、其中,运行轨迹分为“i(”、“)(”和“((”三种模式;
19、当运行轨迹为“i(”时,δt≧3秒;
20、当运行轨迹为“)(”时,δt≧5秒;
21、当运行轨迹为“((”时,δt≧2秒;
22、摆动注油装置摆动行程为l摆,摆动注补油装置摆动可随行总时间,如下式表示:
23、
24、往复摆动注油装置加油随行时间为t行=t总-t等
25、其中,t等=0.5~1秒;
26、摆动注油装置随行加油时间t加油=t行-t压紧进-t回-2t压紧。
27、进一步地,所述t压紧进为压紧装置进给时间,t回为摆动装置回位时间,具体如下式表示:
28、
29、
30、其中,h为缸行程;a为缸活塞面积;k为介质流量系数;p为系统压力;a为给价值口面积。
31、进一步地,所述运行轨迹为“i”模式时,
32、运行轨迹为“)”模式时,
33、运行轨迹为“(”模式时,
34、当满足环行轨道“)”、“(”运行轨迹信号采集时,在被检测部件压下连杆与转轴固定间增加调整垫片h,调整传感器距离表示为
35、其中,r为环行轨道半径。
36、进一步地,所述补油装置的工作周期,具体为:
37、补油结束休眠周期为t(m1);
38、若注油时间t(油)≦2秒,休眠周期t(m1)=4小时;
39、若注油时间t(油)≦4秒,休眠周期t(m1)=6小时;
40、若注油时间t(油)≦6秒,休眠周期t(m1)=8小时;
41、若注油时间t(油)≦8秒,休眠周期t(m1)=12小时;
42、若注油时间t(油)≦10秒,休眠周期t(m1)=24小时。
43、进一步地,所述台车车轮工作环境温度为t(w),当系统结束休眠周期为t(m2)时:
44、若台车车轮工作环境温度t(w)≧60℃,休眠周期t(m2)=4小时;
45、若台车车轮工作环境温度t(w)≧50℃,休眠周期t(m2)=6小时;
46、若台车车轮工作环境温度t(w)≧40℃,休眠周期t(m2)=8小时;
47、若台车车轮工作环境温度t(w)≧30℃,休眠周期t(m2)=12小时;
48、若台车车轮工作环境温度t(w)≧20℃,休眠周期t(m2)=24小时。
49、与现有技术相比,本发明的有益效果是:
50、1、本发明通过三点触觉检测系统,识别每个台车车轮速度及到达加油准确位置,同时完成计算判断给出运行速度,及每个台车车轮到达加油位置的准确时间点,同时根据台车车轮运行轨迹的不同计算不同加油时间,从而能够对每个经过的台车车轮进行注油润滑,该智能系统由plc实现智能自动调节,协调支撑柔性加油装置实现加油工作系统稳定、高效,可每天补油一次,比人工一周一次加油,车轮润滑效果良好。
51、2、本发明的三点触觉传感器不仅可以完成实时速度识别定位,还能够包容数百上千个台车车轮的直径差异,同时能够保障所有台车车轮中心受油孔垂直位置的准确性,该控制系统与温度检测识别系统,协调判断台车工作温度状况,按照润滑“五定标准”智能计算补油周期即休眠期,通过plc控制自动复苏完成下周期补油作业。
本文地址:https://www.jishuxx.com/zhuanli/20240730/157713.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表