城市污水管网中漏损管段的定位方法与流程
- 国知局
- 2024-07-30 11:52:41
本发明涉及计算机辅助定位,特别涉及城市污水管网中漏损管段的定位方法。
背景技术:
1、随着城市化进程加快,污水处理量不断上升,城市排水系统规模不断扩大,建设年限长且缺乏维护管理的管道,大都存在结构性、功能性缺陷,水漏损严重。
2、而管道漏损可能造成能源浪费和严重的安全隐患,给环境和公共卫生带来巨大威胁。
3、现有技术通常通过定期对管道进行检测和维护,确定管道的运行状态和泄漏情况,及时发现和修复漏损,可以避免经济上的损失,排除潜在的安全隐患。排水管网检测对于环保、经济、安全和管道维护都具有重要意义。
4、在现有的排水管网检测的技术中,常用的检测方法可以归纳为闭路电视检测技术(cctv)法、声纳检测法、潜望镜检测(qv)法等。
5、其中,cctv技术是最普遍的检测方法,利用带有摄像镜头的爬行器侵入管道直接成像,其对缺陷定位精准,但易受管道内部水位、杂物、沉积物、残渣的影响,尤其效率较低,难以针对大规模污水管网全系统捡漏;
6、声纳检测法是基于声波传播变化检测管道的方法,其适用于液位高、流量大的管道,但受制于管道材料和环境尤其在城市检测环境中易受噪声干扰;
7、热成像检测法利用热成像系统识别管道表面温度变化信息定位传输介质的泄漏,其操作简单,灵敏度高,但受环境因素影响大、成本高;
8、示踪气体检测法在管道漏损检测领域具有高灵敏度、高度可靠、非侵入性、适用范围广、环保、操作简单等优点;
9、上述方法通常利用5%氢气和95%氮气组成示踪气体,通过氢气传感器感知周边气体中的氢气浓度可判断漏损位置,但对于大规模管网系统,若没有事先预判可能的漏损区域,该方法对示踪气体需求量大,导致成本较高。尤为重要的是,上述检漏方法仅适用于针对管段漏损检测,对于城市污水管网(尤其大规模管网)则束手无策,强制采用这些方法检漏管网则效率极低,成本极高。
10、随着排水系统规模不断扩大,很多城市排水管网高水位运行,流速低,管网淤积严重,城市污水排水管道内存在复杂的微生物活动和物理、化学反应,产生了不容忽视的ch4排放,且ch4的水溶解性差,污水管网中气体甲烷浓度可达数十至数万个ppm,并且城市排水具有水量大、日变化系数相对较小的特点,且埋设地底温度相对恒定,使得甲烷浓度产生相对稳定,此外研究发现城市街道中72%位点的甲烷主要排放污染源为排水系统。由于大气本身甲烷含量极低,可替代常用示踪气体氢气,可称为大规模城市污水管网漏损管段定位的较佳选择。
11、当前,虽然也有通过实验检测与机器学习相结合的方法,即先采用cctv等检测手段先获取管网图象,再用机器学习替代人工识别图片中漏损管道,但该方法仍需要大量现场实验,须花费大量人力和时间成本,且处理管网规模有限。
12、因此,应针对城市大规模排水管网,如何高效确定漏损管段,进一步方便继续采用cctv等常规方法定位漏损具体位置,以提高大规模城市污水管网漏损管段定位效率成为本领域技术人员亟需解决的技术问题。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明提供城市污水管网中漏损管段的定位方法,实现的目的是克服现有技术存在的缺陷而进行管网劣化与漏损风险预测以及实现低成本下管道漏损检测。
2、为实现上述目的,本发明公开了城市污水管网中漏损管段的定位方法,包括如下步骤:
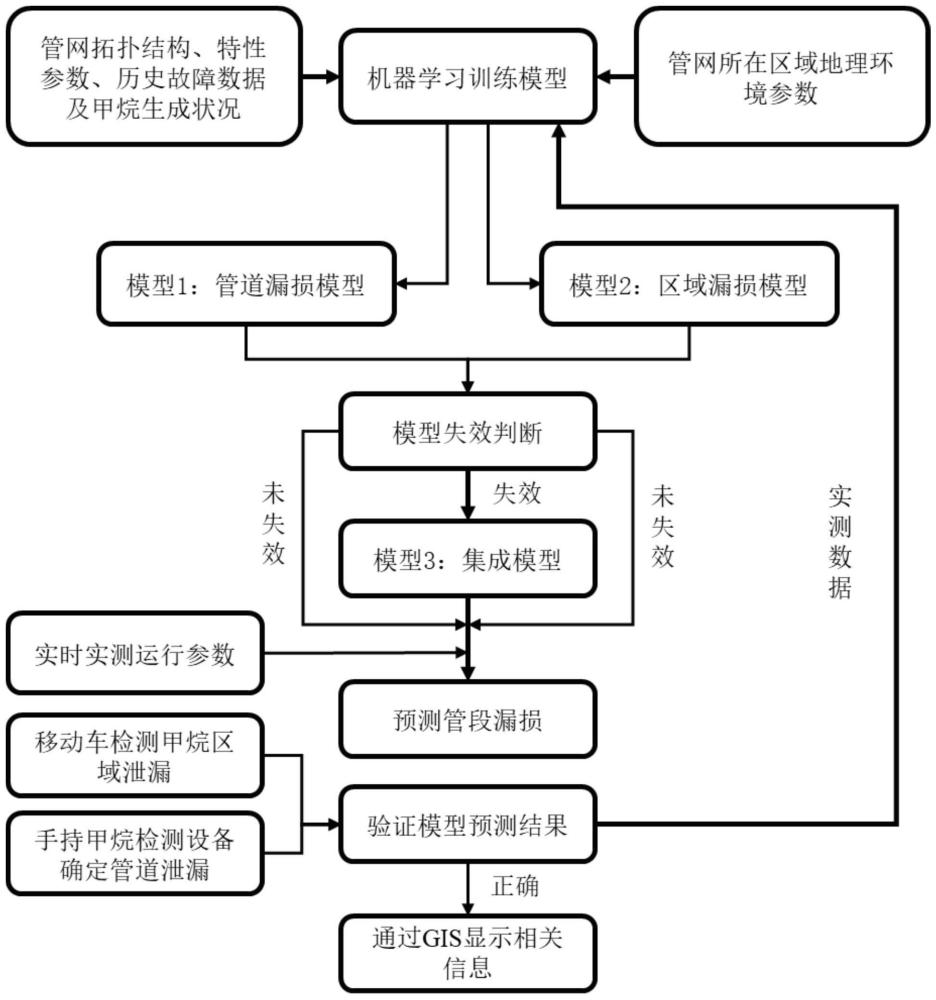
3、步骤1、通过对需要定位的目标管网的管网拓扑结构、特性参数、历史破损数据、及甲烷生成状况进行机器学习训练,得到管道漏损模型和区域漏损模型;
4、步骤2、根据所述目标管网的设计图纸和地区数字化数据,收集所述目标管网的管网数据、地区环境数据和历史破损数据,用于对所述管道漏损模型和所述区域漏损模型进行验证;
5、步骤3、根据所述管道漏损模型和所述区域漏损模型建立所述目标管网中每一管段及相应区域的失效预测数据库,并建立集成模型;
6、步骤4、通过将实时实测的所述目标管网的运行状态参数与环境参数输入到所述集成模型进行预测,并将实测结果与所述集成模型给出的结果进行对比;
7、步骤5、反馈所述集成模型的结果,如所述集成模型的结果错误,则将检测区域的相关数据添加到步骤1的所述机器学习训练中进行优化,并重新执行步骤1至步骤5,直至所述集成模型给出的结果符合要求。
8、优选的,所述管道漏算模型采用梯度增强,即gradient boosting,英文缩写为:gb作为所述机器学习训练方式进行训练;
9、所述域漏算模型采用随机森林,即random forest,英文缩写为:rf作为所述机器学习训练方式进行训练。
10、更优选的,当所述管道漏算模型输出的平均值与真实值之间的差异大于20%时,则集合所述管道漏算模型中包括年限、直径、深度、坡度、长度、管型和材料等管道数据的相关,以及包括目标管网所在地区的地质情况、土地覆盖厚度、地下水水位和交通量的区域数据,采用基于决策树的梯度增强即gradient boosting,英文缩写为:gb和随机森林即random forest,英文缩写为:rf的集成方法作为所述机器学习训练方式进行训练。
11、更优选的,基于决策树的所述管道漏算模型通过计算后验分布来获得所有可能预测的权重来计算,具体公式如下:
12、
13、其中,x和y为影响因素集矩阵和管道状态矩阵;
14、y*和x*为预测的单个管道状态矩阵和印象因素矩阵;
15、f*和φ为测试点变量和probit函数。
16、优选的,所述管网数据包括所述目标管网每一所述管段的特性参数数据和每两个相邻所述管段的连接信息;
17、每一所述管段的所述特性参数数据包括使用年限、直径、深度、坡度、长度、管型和材料;
18、所述地区环境数据包括所述目标管网所在地区的地质情况、土地覆盖厚度、地下水水位和交通量。
19、优选的,在步骤2中,如果没有所述历史破损数据,或者所述历史破损数据小于10次破损数据,则采用人为制造“漏损”,即打开管道连接处的检查井的方法收集漏损数据;
20、对于所述目标管网每一无漏损数据的管段,均采用相近的有漏损数据的所述管段与无漏损数据的所述管段进行联用,形成区域漏损相关数据。
21、更优选的,数据指标可以采用甲烷浓度。
22、优选的,在步骤3中,若失效数据即模型输出漏损概率偏离真实值20%以上的预测点占比超过一半,则将管道数据和区域数据均作为输入数据,以提高数据样本,采用基于决策树的梯度增强和随机森林的集成方法再进行模拟预测。
23、优选的,在步骤4中,采用甲烷指标进行实地漏损检查;具体为:通过移动车检测甲烷的泄漏区域,确定区域后,再安排人员手持甲烷检测设备定位泄漏的所述管段获得实时实测的所述目标管网的运行状态参数与环境参数。
24、优选的,在步骤5中,所述集成模型的结果基于地理信息系统,即gis实现可视化显示,并在所述gis的数据库的基础上,建立和更新所述目标管网的未来状况的预测信息。
25、本发明的有益效果:
26、本发明将管网的特征参数和地区环境因素作为机器学习的输入参数进行模型训练,通过训练的模型来捕捉输入因素与管道条件状态之间的线性和非线性关系,用于管网正式工作时的劣化及漏损预测,基于收集的历史破损数据,对模型的预测结果进行验证。
27、本发明训练的机器学习模型分为区域漏损预测模型和管网漏损模型,基于多因素范围的失效预测数据库建立的集成模型,可通过模型预测管网的状态及漏损风险,避免了发生管网漏损时可能造成的扩大化影响,包括能源浪费和安全隐患以及对环境和公共卫生带来的威胁。
28、发明通过大范围的输入因子和检查数量并使用充分分布的数据集来提高机器学习算法的漏损预测模型的精度,与现有的许多其他机器学习方法相比,无需超参数(即隐层数和每层节点数)调整,且模型可以有效地处理不同类型的输入和输出,包括数字、类别。
29、本发明利用管网常年不间断自发产生气体甲烷特点确定管网区域和管段漏损状态,基于甲烷在管段中的自然产生及累积数据,在检查井外测量甲烷浓度,实现了更低成本管段漏损确定,充分利用了污水管道自产甲烷和浓度高的特性,且甲烷在水中溶解度低。
30、本发明集预测与检测于一体,可实现动态参数及检测结果当作新数据集对初始模型不断进行机器学习优化,可使模型适用的区域范围不断扩大,提高模型对管道漏损的预测性结果。
31、本发明采用管道内自然产生的甲烷气体浓度为指标进行管道漏损的物理定位,克服了大规模管网采用大量示踪气体的不现实性;
32、本发明实现了区域和单个管网漏损情况的判断与预测,且结合甲烷监测车收集与模型比较区域甲烷浓度数据,在此基础上,进一步通过手持甲烷监测设备定位具体管段漏损情况,确定漏损管段后,方便cctv等技术进一步确定具体漏损位置,大幅减少了大规模管网漏损定位效率;
33、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
本文地址:https://www.jishuxx.com/zhuanli/20240730/158086.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表