一种拖曳式水下石油管线溢油监管机器人的制作方法
- 国知局
- 2024-07-30 12:12:19
本技术涉及水下石油管线溢油监管,尤其涉及一种拖曳式水下石油管线溢油监管机器人。
背景技术:
1、随着时代的进步,石油对我们的生活越来越重要。出行的汽车、飞机、轮船等交通工具所需要的燃油是由石油制成的,生活中所有的塑料制品也几乎都是石油产品,我们从衣服标签看到的涤纶、腈纶、锦纶等面料,都是由石油生产的合成纤维,以及我们生活中所用到的清洁用品、润滑油、化妆品等都需要石油,所以我们的生活已经离不开石油。而从中国海洋石油集团有限公司2020年的发展概况中了解到,2019年,中国海油全年生产原油7916万吨。由此可看出海上石油资源非常富饶;而输送水下石油资源的主要途径是通过水下石油输送管道进行石油的运输。虽然水下石油输送管道运输石油与其他方式比受气候影响较小,运输过程比较稳定,但是长时间在水下浸泡的石油输送管道会受到管道内石油和管道外周围海水的腐蚀作用,管道内的压力和外部的其他作用力也会对管道造成应力腐蚀,这些因素极易造成水下石油输送管道的损坏继而发生石油资源的泄漏。当石油溢出时,会使污染海洋环境,导致生态平衡失调,使海洋生态系统遭到破坏,会使危害人类健康。会使盐业和海水淡化业等都会直接被溢油污染,造成严重的经济损失。从1967年至今全球一共发生近10起大型的石油泄漏事故,泄漏的石油少则几千吨多则上百万吨。单根据中国石化对历史资料的统计,每年石油管道传输损耗为0.7%,每年的经济损失更是在10亿左右;海上溢油对于环境有着十分严重的影响,必须加以控制才能缓解对水资源环境的污染,这就要求我们从着手对海上溢油检测技术进行研发,从而能够为保护环境寻找出路。然而在市面上还没有基于图像识别的水下漏油监测装置,所以针对海洋钻井平台水下石油输送管道溢油问题,设计一种基于可见光谱图像识别的水下油滴监测装置。只有对漏油位置的准确预警才能尽快解决漏油问题,减少对经济损失以及生态环境破坏,目前管道泄漏监测方法主要分为外部监测以及内部监测两大类,其内部监测法主要分为压力梯度法、压力点分析法,负压波法,次声波法等;外部监测方法分为光纤监测法、气体成像法、气体监测法等。其中只有三种适用于海底管道泄漏的监测方法,分别是次声波法,光纤法,以及气体监测法,由于海底的环境复杂,次声波监测法容易受到环境的影响,可能会发生误报的情况,光纤在海底施工安装困难,并且光纤传感系统的长期可靠性保证以及光纤损坏修复的成本都颇高,为此我们提出了一种拖曳式水下石油管线溢油监管机器人。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在安装困难、维护成本高的缺点,而提出的一种拖曳式水下石油管线溢油监管机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
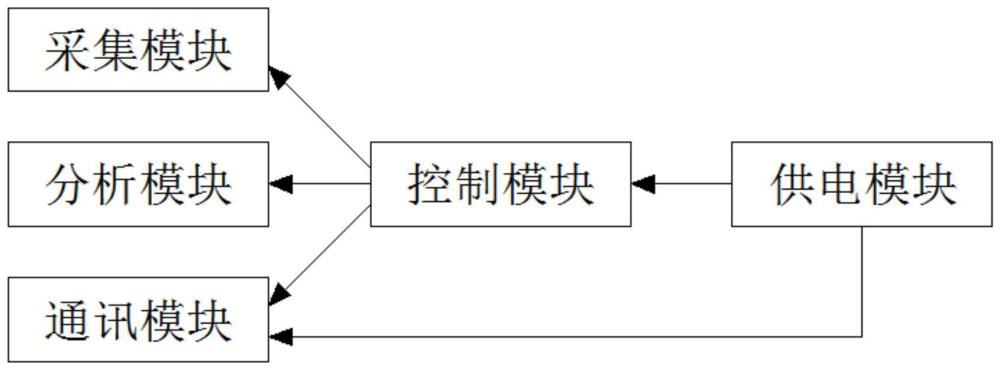
3、一种拖曳式水下石油管线溢油监管机器人,包括壳体和无人船,所述壳体内设置有采样暗室,所述采样暗室的下方设置有照明光圈,所述壳体内设置有供电模块、控制模块、通讯模块、分析模块和采集模块,所述采集模块、通讯模块和分析模块均与控制模块电性连接,所述控制模块和通讯模块均与供电模块电性连接,所述壳体上设置有抽水系统和排水系统,所述抽水系统和排水系统上均设置有平衡翼,所述壳体内设置有漏油报警系统,漏油报警系统包括单片机和数字继电器,在对接收到单片机输出的io信号后需要做出相应的反映,如识别到石油,单片机向数字继电器传输io信号改变装置在海底的姿态,并且数字继电器需要有定时功能。
4、优选的,所述壳体上设置有拖电线缆接口,拖电线缆接口与无人船相连接,无人船上设置有北斗通信定位系统,北斗通信定位系统由gis定位系统、岸基站组成,应用北斗卫星信号将漏油信息以及位置发生给北斗卫星,通过岸基站解析北斗卫星接收到的短报文进行漏油位置定位。
5、优选的,所述控制模块包括树莓派,树莓派与采集摄像头电性连接。
6、优选的,所述供电模块包括供电系统,供电系统与树莓派电性连接。
7、优选的,所述采集模块包括采集摄像头,采集摄像头与照明光圈电性连接,图像采集模块:作为图像识别系统的核心,首先是图像识别的准确度,其次需要拥有强大的图像识别功能。通过对市面上采集设备的功能,性能,价格进行横向对比后,本文选用有着低耗能、高集成度、高性能彩色cmos1200万像素工业相机焦距10-50mm成像尺寸1/2.5c,并配有usb2.0接口可以让我们通过树莓派4b实现周期性的定时拍照取样,满足了我们水下石油管道溢油检测机器人长期性的定时拍照的功能需求;树莓派与传统计算机相比性价比极高,外设与接口众多,支持与其他开发板进行联合开发,连接无线鼠标、键盘和hdmi高清显示屏之后,就可以作为一个功能齐全的微型计算机,可以作为物联网项目的主机,在上面搭建完整的上位机和web服务器等,水下石油管道溢油检测系统选用的是嵌入式高性能树莓派4b平台,树莓派4b搭载博通bcm2711处理器,1.5ghz,采用arm cortex-a72架构,lpddr4内存,拥有1gb、2gb和4gb三个版本。树莓派4支持双频802.11ac wi-fi、蓝牙5.0,拥有千兆网口、2个hdmi 2.0接口、2个usb 3.0和两个usb 2.0接口,支持双屏4k输出,配备usb-c供电接口,整体性能更加强大。
8、本实用新型中,所述一种拖曳式水下石油管线溢油监管机器人的有益效果:该机器人采用拖曳方式跟随无人船定时对水下石油输送管道进行溢油监测,一次投放、无需人工干预,本项目基于润湿理论和油水分离原理实现了吸附材料对水中油滴采集,实现了在自动控制条件的水下可见光拍照,和现场油滴特征图像的人工智能分析,并利用拖曳线缆实现与上位机数据交换,机器人综合了以往监测技术的优点,具有监测范围大、反应及时、机动灵活、自动报警、地理信息系统和数据通信系统支持的特征,并且水下监测装置是一次性的不用担心后续的维护,相比起现有的泄漏监测法有着高灵活度,成本低,安装简便的优点。
9、本实用新型有着高灵活度,成本低,安装简便的优点。
技术特征:1.一种拖曳式水下石油管线溢油监管机器人,包括壳体(1)和无人船,其特征在于,所述壳体(1)内设置有采样暗室(2),所述采样暗室(2)的下方设置有照明光圈(3),所述壳体(1)内设置有供电模块、控制模块、通讯模块、分析模块和采集模块,所述采集模块、通讯模块和分析模块均与控制模块电性连接,所述控制模块和通讯模块均与供电模块电性连接,所述壳体(1)上设置有抽水系统(7)和排水系统(8),所述抽水系统(7)和排水系统(8)上均设置有平衡翼(9),所述壳体(1)内设置有漏油报警系统。
2.根据权利要求1所述的一种拖曳式水下石油管线溢油监管机器人,其特征在于,所述采集模块包括采集摄像头(4),采集摄像头(4)与照明光圈(3)电性连接。
3.根据权利要求2所述的一种拖曳式水下石油管线溢油监管机器人,其特征在于,所述控制模块包括树莓派(5),树莓派(5)与采集摄像头(4)电性连接。
4.根据权利要求3所述的一种拖曳式水下石油管线溢油监管机器人,其特征在于,所述供电模块包括供电系统(6),供电系统(6)与树莓派(5)电性连接。
5.根据权利要求1所述的一种拖曳式水下石油管线溢油监管机器人,其特征在于,所述壳体(1)上设置有拖电线缆接口(10),拖电线缆接口(10)与无人船相连接。
技术总结本技术属于水下石油管线溢油监管技术领域,尤其是一种拖曳式水下石油管线溢油监管机器人,针对现有的安装困难、维护成本高的问题,现提出如下方案,其包括壳体和无人船,所述壳体内设置有采样暗室,所述采样暗室的下方设置有照明光圈,所述壳体内设置有供电模块、控制模块、通讯模块、分析模块和采集模块,所述采集模块、通讯模块和分析模块均与控制模块电性连接,所述控制模块和通讯模块均与供电模块电性连接,所述壳体上设置有抽水系统和排水系统,所述抽水系统和排水系统上均设置有平衡翼,所述壳体内设置有漏油报警系统,本技术有着高灵活度,成本低,安装简便的优点。技术研发人员:于翔,郑旭坤,商宁宇,郭桂均,徐勇浩,李亚兵,王磊,杨志龙,谭京科受保护的技术使用者:天津合众未来科技有限公司技术研发日:20231025技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240730/159198.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
防滴漏灌装头的制作方法
下一篇
返回列表