全自动触摸屏贴合机的制作方法
- 国知局
- 2024-07-31 22:39:51
本技术涉及触摸屏加工设备,尤其公开了一种全自动触摸屏贴合机。
背景技术:
1、随着科学技术的发展,触摸屏的样式和形状屡见不鲜。触摸屏又称为“触控屏”、“触控面板”,是一种可接收触头等输入讯号的感应式液晶显示装置,当接触了屏幕上的图形按钮时,屏幕上的触觉反馈系统可根据预先编程的程式驱动各种连结装置,可用以取代机械式的按钮面板,并借由液晶显示画面制造出生动的动画效果。现有的触摸屏在生产加工时,需要撕除触摸板的保护膜、导光板的上保护膜和下保护膜,再将pcb板和触摸板分别粘附在导光板的两侧表面,总共需要三次撕膜和两次贴合工序,工序繁琐,人工加工效率低下,且长时间的工作会导致工人疲劳,导致产品质量下降,影响产品的良品率。
技术实现思路
1、本实用新型提供了一种全自动触摸屏贴合机,旨在解决现有人工贴合触摸屏的方式效率低下的问题。
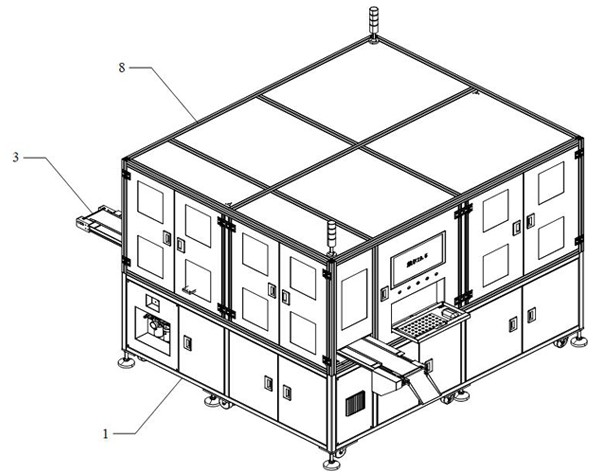
2、本实用新型涉及一种全自动触摸屏贴合机,其包括:下机架,下机架上设置有贴合台组件;上料模块,包括并排设置于贴合台组件一侧pcb板上料组件和触摸板上料组件;传送带模块,包括并排设置于贴合台组件另一侧的导光板上料组件和产品下料组件;贴合模块,设置于贴合台组件顶部之上,贴合模块从pcb板上料组件吸附pcb板并放置于贴合台组件、以及从导光板上料组件吸附导光板并贴合于贴合台组件上的pcb板上、以及从触摸板上料组件吸附触摸板并贴合于贴合台组件上的导光板上、以及从贴合台组件上吸附贴合好的触摸屏并放置于产品下料组件上;第一撕膜组件,邻近导光板上料组件设置,且在贴合模块吸附导光板时对导光板底面进行撕膜;第二撕膜组件,邻近贴合台组件设置,且在触摸板贴合于导光板之前对导光板顶面进行撕膜;第三撕膜组件,邻近触摸板上料组件设置,且在贴合模块吸附触摸板时对触摸板底面进行撕膜。
3、作为本实用新型的进一步改进,贴合模块包括第一滑轨、第二滑轨、设置于第一滑轨两端的第一吸附组件和第二吸附组件和设置于第二滑轨两端的第三吸附组件和第四吸附组件,第一吸附组件邻近pcb板上料组件且用于吸附pcb板,第二吸附组件邻近导光板上料组件且用于吸附导光板,第三吸附组件邻近触摸板上料组件且用于吸附触摸板,第四吸附组件邻近产品下料组件且用于吸附贴合好的触摸屏。
4、作为本实用新型的进一步改进,邻近第一吸附组件、第二吸附组件、第三吸附组件分别设置有第一定位摄像组件、第二定位摄像组件、第三定位摄像组件,第一吸附组件根据第一定位摄像组件定位pcb板,第二吸附组件根据第二定位摄像组件定位pcb板和导光板,第三吸附组件根据第三定位摄像组件定位导光板和触摸板。
5、作为本实用新型的进一步改进,第一定位摄像组件包括定位pcb板的第一底部摄像头,第一底部摄像头设置于下机架内且邻近第一吸附组件,第二定位摄像组件包括定位导光板的第二底部摄像头和定位贴合台组件上的pcb板的第一顶部摄像头,第二底部摄像头设置于下机架内且邻近第二吸附组件,第一顶部摄像头设置于第二吸附组件上,第三定位摄像组件包括定位触摸板的第三底部摄像头和定位贴合台组件上导光板的第二顶部摄像头,第三底部摄像头设置于下机架内且邻近第三吸附组件,第二顶部摄像头设置于第三吸附组件上。
6、作为本实用新型的进一步改进,贴合台组件包括第三滑轨、滑动设置于第三滑轨上的第一运载机构和设置于第一运载机构上的贴合台,第三滑轨沿第一吸附组件指向第三吸附组件的方向设置,第一运载机构初始时位于邻近第一吸附组件的位置,且在导光板贴合于pcb板后,带动贴合台运动至邻近第三吸附组件的位置。
7、作为本实用新型的进一步改进,pcb板上料组件和触摸板上料组件均包括设置于下机架内且位于下机架底部的横向运载机构、设置于下机架内且底端邻近横向运载机构末端的纵向提升机构、活动设置于下机架上的空盘回收机构、设置于下机架上的空盘缓存机构和设置于下机架上且邻近纵向提升机构的取料机构,横向运载机构将上料区的满料盘运输至提升区,纵向提升机构将提升区处的满料盘提升至取料区,空盘回收机构将取料区的空料盘回收至空盘缓存机构进行缓存,取料机构从取料区抓取pcb板或触摸板以供第一吸附组件或第三吸附组件吸附。
8、作为本实用新型的进一步改进,取料机构包括机械手、第四滑轨、滑动设置于第四滑轨上的第二运载机构和设置于第二运载机构上的中转台,机械手设置于下机架上,第四滑轨设置于机械手和第一吸附组件或机械手和第三吸附组件之间,机械手从取料区抓取pcb板或触摸板并放置于中转台上,第二运载机构带动中转台在机械手和第一吸附组件或机械手和第三吸附组件之间运动,第一吸附组件从中转台上吸附pcb板或第三吸附组件从中转台上吸附触摸板。
9、作为本实用新型的进一步改进,其还包括上机架,上机架盖合于下机架上,上机架位于中转台的顶部设置有摄像头。
10、作为本实用新型的进一步改进,第一撕膜组件和第三撕膜组件均包括:第一传动机构、设置于第一传动机构上的第一支撑臂,设置于第一支撑臂上的第一夹爪机构,第一夹爪机构包括第一安装板、固定设置于第一安装板上的第一电机和活动设置于第一安装板上的第一夹爪,第一电机的输出端与第一夹爪的尾端通过皮带转动连接。
11、作为本实用新型的进一步改进,第二撕膜组件包括:竖直设置的第二传动机构、活动设置于第二传动机构上的升降底座、水平设置于升降底座上的第三传动机构、设置于第三传动机构上的第二支撑臂、设置于第二支撑臂顶端的第二夹爪机构,第二夹爪机构包括第二安装板、固定设置于第二安装板上的第二电机和活动设置于第二安装板上的第二夹爪,第二电机的输出端与第二夹爪的尾端通过皮带转动连接。
12、本实用新型所取得的有益效果为:
13、本实用新型提供了一种全自动触摸屏贴合机,通过设置下机架、上料模块、传送带模块、贴合模块、第一撕膜组件、第二撕膜组件和第三撕膜组件,下机架上设置有贴合台组件,上料模块包括pcb板上料组件和触摸板上料组件,传动带模块包括导光板上料组件和产品下料组件,首先利用贴合模块从pcb板上料组件上吸附pcb板并放置于贴合台组件上,再利用贴合模块从导光板上料组件上吸附导光板,且利用第一撕膜组件撕掉导光板底面的膜,再将导光板贴合至贴合台组件上的pcb板上,再利用第二撕膜组件撕掉导光板顶面的膜,再由贴合模块从触摸板上料组件上吸附触摸板,再利用第三撕膜组件四点触摸板底面的膜,再将触摸板贴合在贴合台组件上的导光板上,得到贴合好的触摸屏,再由贴合模块从贴合台组件上吸附触摸屏并转移至产品下料组件进行下料,从而完成触摸屏的生产,整个加工过程全自动化进行,大大提升了触摸屏的生产效率,且不会出现因人工疲劳而影响加工质量的现象,进而提高了产品的良品率。
技术特征:1.一种全自动触摸屏贴合机,其特征在于,其包括:
2.根据权利要求1所述的全自动触摸屏贴合机,其特征在于,所述贴合模块包括第一滑轨、第二滑轨、设置于所述第一滑轨两端的第一吸附组件和第二吸附组件和设置于所述第二滑轨两端的第三吸附组件和第四吸附组件,所述第一吸附组件邻近所述pcb板上料组件且用于吸附pcb板,所述第二吸附组件邻近所述导光板上料组件且用于吸附导光板,所述第三吸附组件邻近所述触摸板上料组件且用于吸附触摸板,所述第四吸附组件邻近所述产品下料组件且用于吸附贴合好的触摸屏。
3.根据权利要求2所述的全自动触摸屏贴合机,其特征在于,邻近所述第一吸附组件、所述第二吸附组件、所述第三吸附组件分别设置有第一定位摄像组件、第二定位摄像组件、第三定位摄像组件,所述第一吸附组件根据所述第一定位摄像组件定位pcb板,所述第二吸附组件根据所述第二定位摄像组件定位pcb板和导光板,所述第三吸附组件根据所述第三定位摄像组件定位导光板和触摸板。
4.根据权利要求3所述的全自动触摸屏贴合机,其特征在于,所述第一定位摄像组件包括定位pcb板的第一底部摄像头,所述第一底部摄像头设置于所述下机架内且邻近所述第一吸附组件,所述第二定位摄像组件包括定位所述导光板的第二底部摄像头和定位所述贴合台组件上的pcb板的第一顶部摄像头,所述第二底部摄像头设置于所述下机架内且邻近所述第二吸附组件,所述第一顶部摄像头设置于所述第二吸附组件上,所述第三定位摄像组件包括定位所述触摸板的第三底部摄像头和定位所述贴合台组件上导光板的第二顶部摄像头,所述第三底部摄像头设置于所述下机架内且邻近所述第三吸附组件,所述第二顶部摄像头设置于所述第三吸附组件上。
5.根据权利要求2所述的全自动触摸屏贴合机,其特征在于,所述贴合台组件包括第三滑轨、滑动设置于所述第三滑轨上的第一运载机构和设置于所述第一运载机构上的贴合台,所述第三滑轨沿所述第一吸附组件指向所述第三吸附组件的方向设置,所述第一运载机构初始时位于邻近所述第一吸附组件的位置,且在导光板贴合于pcb板后,带动所述贴合台运动至邻近所述第三吸附组件的位置。
6.根据权利要求2所述的全自动触摸屏贴合机,其特征在于,所述pcb板上料组件和所述触摸板上料组件均包括设置于所述下机架内且位于下机架底部的横向运载机构、设置于所述下机架内且底端邻近所述横向运载机构末端的纵向提升机构、活动设置于所述下机架上的空盘回收机构、设置于所述下机架上的空盘缓存机构和设置于所述下机架上且邻近所述纵向提升机构的取料机构,所述横向运载机构将上料区的满料盘运输至提升区,所述纵向提升机构将所述提升区处的满料盘提升至取料区,所述空盘回收机构将所述取料区的空料盘回收至所述空盘缓存机构进行缓存,所述取料机构从所述取料区抓取pcb板或触摸板以供所述第一吸附组件或所述第三吸附组件吸附。
7.根据权利要求6所述的全自动触摸屏贴合机,其特征在于,所述取料机构包括机械手、第四滑轨、滑动设置于所述第四滑轨上的第二运载机构和设置于所述第二运载机构上的中转台,所述机械手设置于所述下机架上,所述第四滑轨设置于所述机械手和所述第一吸附组件或所述机械手和所述第三吸附组件之间,所述机械手从所述取料区抓取pcb板或触摸板并放置于所述中转台上,所述第二运载机构带动所述中转台在所述机械手和所述第一吸附组件或所述机械手和所述第三吸附组件之间运动,所述第一吸附组件从所述中转台上吸附pcb板或所述第三吸附组件从所述中转台上吸附触摸板。
8.根据权利要求7所述的全自动触摸屏贴合机,其特征在于,其还包括上机架,所述上机架盖合于所述下机架上,所述上机架位于所述中转台的顶部设置有摄像头。
9.根据权利要求1所述的全自动触摸屏贴合机,其特征在于,所述第一撕膜组件和所述第三撕膜组件均包括:第一传动机构、设置于所述第一传动机构上的第一支撑臂,设置于所述第一支撑臂上的第一夹爪机构,所述第一夹爪机构包括第一安装板、固定设置于所述第一安装板上的第一电机和活动设置于所述第一安装板上的第一夹爪,所述第一电机的输出端与所述第一夹爪的尾端通过皮带转动连接。
10.根据权利要求1所述的全自动触摸屏贴合机,其特征在于,所述第二撕膜组件包括:竖直设置的第二传动机构、活动设置于所述第二传动机构上的升降底座、水平设置于所述升降底座上的第三传动机构、设置于所述第三传动机构上的第二支撑臂、设置于所述第二支撑臂顶端的第二夹爪机构,所述第二夹爪机构包括第二安装板、固定设置于所述第二安装板上的第二电机和活动设置于所述第二安装板上的第二夹爪,所述第二电机的输出端与所述第二夹爪的尾端通过皮带转动连接。
技术总结本技术公开了一种全自动触摸屏贴合机,其包括:下机架、上料模块、传送带模块、贴合模块、第一撕膜组件、第二撕膜组件和第三撕膜组件,下机架上设置有贴合台组件,上料模块包括PCB板上料组件和触摸板上料组件,传动带模块包括导光板上料组件和产品下料组件,贴合模块用于从PCB板上料组件、导光板上料组件、触摸板上料组件取料,并在贴合台组件上进行贴合,并在进行贴合前,利用第一撕膜组件和第二撕膜组件分别撕掉导光板顶面和底面的膜,利用第三撕膜组件撕掉触摸板底面的膜,再进行贴合,得到贴合好的触摸屏,再由贴合模块将触摸屏转移至产品下料组件下料,全自动完成触摸屏的加工,加工效率高。技术研发人员:晏正龙,杨祁麟,莫仕光受保护的技术使用者:深圳市圣智明技术有限公司技术研发日:20240106技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/194053.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表