一种自适应权重和动态社交策略的无人机航迹规划方法
- 国知局
- 2024-07-31 22:43:10
本发明涉及无人机,具体为一种自适应权重和动态社交策略的无人机航迹规划方法。
背景技术:
1、无人机航迹规划问题的目标多种多样,但通常包括最小化路径长度和降低威胁级别。当同时处理多个目标时,建模为单目标或多目标优化问题涉及两种不同的解决方法。此外,还必须考虑各种约束条件,例如飞机转弯角度的限制和其他实际要求。这些约束在确保航迹规划解决方案的可行性和适用性方面发挥着至关重要的作用。无人机航迹规划问当建模为单目标优化问题时,主要目标是最小化路径长度。在这种情况下,目标是缩短路径长度,而威胁水平和转弯角度的限制被表示为约束条件,以确保解决方案的可行性。然而,目前现有的无人机航迹规划存在收敛精度以及收敛速度较弱的问题。
2、因此,本发明提出了一种自适应权重和动态社交策略的无人机航迹规划方法来解决上述技术问题。
技术实现思路
1、本发明提供了一种自适应权重和动态社交策略的无人机航迹规划方法,解决了无人机航迹规划存在收敛精度以及收敛速度较弱的问题。
2、为实现上述目的,本发明提供如下技术方案:一种自适应权重和动态社交策略的无人机航迹规划方法,包括以下步骤:
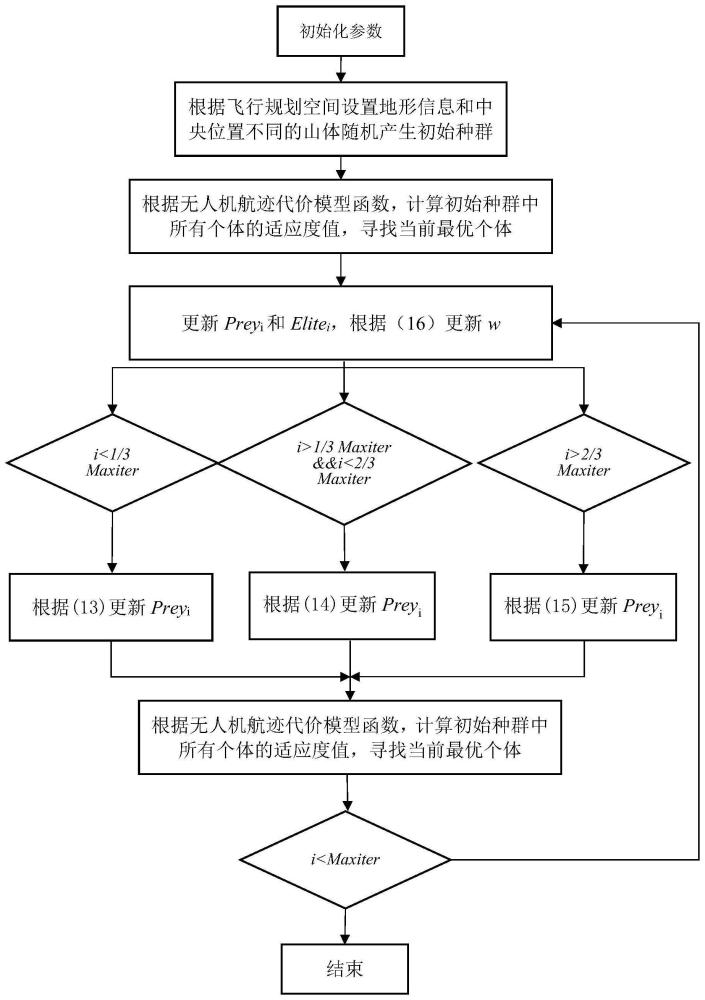
3、s1、初始化参数,根据飞行规划空间设置地形信息和中央位置不同的山体随机产生初始种群;
4、s2、根据无人机航迹代价模型函数,计算初始种群中所有个体的适应度值,寻找当前最优个体;
5、s3、更新preyi和elitei,其中i表示迭代次数,并依据更新后的preyi和elitei,更新惯性权重ω;
6、s4、个体依据迭代次数在不同范围之间的总迭代次数对社交策略进行位置的更新;
7、s5、利用无人机航迹代价模型函数,更新最优个体及最优适应度值;
8、s6、若i达到最大迭代次数,则方法结束,输出最优适应度值和最优个体,否则返回s3继续执行。
9、优选的,步骤s1中,参数包括种群规模n、种群维度dim和最大迭代次数maxiter。
10、优选的,步骤s1中,设(xi,yi,zi)为规划空间内一点,(xi,yi)是经度和纬度信息,zi为海拔高度信息,故航迹规划的三维空间可描述成:
11、
12、其中,xmax、ymax分别是规划空间的最大经纬度;h、h分别是空间的最小与最大海拔高度;zmin、zmax分别是无人机离地面的安全距离。
13、优选的,空间地形模型是由不同的山体和山峰叠加构成,采用指数函数来描述中央位置不同的山体,即:
14、
15、其中,(xi,yi)为山体中心对称轴坐标,(xs,ys)为山体范围坐标,hi为山体的最高点。
16、优选的,步骤s2中,无人机航迹代价模型构成因素包括威胁代价模型和飞行姿态代价约束条件,则无人机三维航迹代价模型可表示为:
17、
18、式中,fk分别表示无人机航迹的雷达威胁代价、防空武器威胁代价、飞行姿态代价、最长航迹段长度代价以及最短航迹段长度代价,wk为对应的权重因子。
19、优选的,无人机航迹代价模型构成因素具体包括如下:
20、(1)雷达威胁代价,通常雷达的探测范围为圆柱形,故设雷达对无人机的威胁概率为:
21、
22、其中,ri为雷达中心到无人机的距离;δ为雷达探测散射截面大小;
23、(2)防空武器威胁代价,武器的杀伤概率受到多种因素影响,通过对火力威胁进行简化,结果和雷达威胁类似,将防空武器威胁的范围看作为圆柱形,故设防空武器对无人机的威胁概率为:
24、
25、其中,ri为防空武器中心到无人机的距离;β为防空武器射击截面大小;
26、(3)飞行姿态代价,飞行姿态包括无人机最大偏航角度和最大俯冲/爬升角度,故设防空武器对无人机的威胁概率为:
27、fo=k1θt+k2θp
28、1)最大偏航角度θt,无人机飞行航向的改变是通过控制偏航通道来实现的,该约束被描述成:
29、
30、2)最大俯冲/爬升角度θp,无人机的俯冲角和爬升角限制规划航迹在z方向上俯冲与爬升的最大角度,该约束表示为:
31、
32、(4)最长航迹段长度代价,最长航迹距离是指无人机能够飞行的最大距离,主要和无人机携带的燃料多少以及允许的任务执行时间有关,则航迹长度应满足式:
33、
34、(5)最短航迹段长度代价,无人机在改变飞行姿态前,保持同一直线飞行距离,保证无人机的飞行稳定性,则该约束的数学描述为:
35、fi>lmin
36、其中,lmin为无人机的最短航迹段长度。
37、优选的,步骤s3中,矩阵preyi和elitei分别表示为:
38、
39、
40、在海洋捕食者算法mpa的背景下,发现的最佳解决方案被确定为占主导地位的捕食者,它在创建被称为精英elitei的矩阵中发挥着关键作用,通过上述矩阵便于根据猎物本身的位置信息跟踪和定位猎物。
41、优选的,位置更新具体包括如下情况:
42、1)迭代次数<1/3总迭代次数
43、
44、2)1/3总迭代次数<迭代次数<2/3总迭代次数
45、
46、3)迭代次数>2/3总迭代次数
47、
48、优选的,惯性权重具体包括如下:
49、
50、其中,ωinit=0.9,ωend=0.4。
51、与现有技术相比,本发明的有益效果:本发明提供了一种自适应权重和动态社交策略的无人机航迹规划方法,能够快速有效地解决无人机航迹规划问题,并在各方面优于其他方法,收敛精度和收敛速度均显著提高,具有更优异的竞争性能。
技术特征:1.一种自适应权重和动态社交策略的无人机航迹规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种自适应权重和动态社交策略的无人机航迹规划方法,其特征在于:步骤s1中,参数包括种群规模n、种群维度dim和最大迭代次数maxiter。
3.根据权利要求2所述的一种自适应权重和动态社交策略的无人机航迹规划方法,其特征在于:步骤s1中,设(xi,yi,zi)为规划空间内一点,(xi,yi)是经度和纬度信息,zi为海拔高度信息,故航迹规划的三维空间可描述成:
4.根据权利要求3所述的一种自适应权重和动态社交策略的无人机航迹规划方法,其特征在于:空间地形模型是由不同的山体和山峰叠加构成,采用指数函数来描述中央位置不同的山体,即:
5.根据权利要求1所述的一种自适应权重和动态社交策略的无人机航迹规划方法,其特征在于:步骤s2中,无人机航迹代价模型构成因素包括威胁代价模型和飞行姿态代价约束条件,则无人机三维航迹代价模型可表示为:
6.根据权利要求5所述的一种自适应权重和动态社交策略的无人机航迹规划方法,其特征在于:无人机航迹代价模型构成因素具体包括如下:
7.根据权利要求1所述的一种自适应权重和动态社交策略的无人机航迹规划方法,其特征在于:步骤s3中,矩阵preyi和elitei分别表示为:
8.根据权利要求1所述的一种自适应权重和动态社交策略的无人机航迹规划方法,其特征在于:位置更新具体包括如下情况:
9.根据权利要求1所述的一种自适应权重和动态社交策略的无人机航迹规划方法,其特征在于:惯性权重具体包括如下:
技术总结本发明公开了一种自适应权重和动态社交策略的无人机航迹规划方法,包括初始化种群规模N、种群维度dim、最大迭代次数Maxiter各参数,根据飞行规划空间设置地形信息和中央位置不同的山体随机产生初始种群;根据无人机航迹代价模型函数,计算初始种群中所有个体的适应度值,寻找当前最优个体;并依据更新后的Prey<subgt;i</subgt;和Elite<subgt;i</subgt;,更新惯性权重ω;个体依据迭代次数在不同范围之间的总迭代次数对社交策略进行位置的更新;利用无人机航迹代价模型函数,更新最优个体及最优适应度值;若i达到最大迭代次数,则方法结束,输出最优适应度值和最优个体,否则返回继续执行。本发明在各方面优于其他方法,收敛精度和收敛速度均显著提高,具有更优异的竞争性能。技术研发人员:叶春,刘惠明受保护的技术使用者:江苏信息职业技术学院技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/194268.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表