基于改进蜣螂优化算法的泊位岸桥调度方法
- 国知局
- 2024-07-31 22:43:50
本发明涉及港口调度领域,具体涉及基于改进蜣螂优化算法的泊位岸桥调度方法。
背景技术:
1、泊位岸桥调度问题(berthallocation and quay craneassignment problems,bacap)是港口运营管理中的核心问题之一。该问题涉及在给定的港口资源限制下,如何合理安排船舶的靠泊位置和分配岸桥资源,以达到最小化作业成本和提高港口吞吐量的目的。由于bacap的高复杂性和动态变化特性,这一问题被证明是一个hard-np问题,对算法的设计和选择提出了较高的要求。
2、在处理bacap问题的过程中,传统的数值优化方法如枚举法和梯度下降法往往因其时间复杂度高而不适用于实际应用,尤其是在需要快速响应的港口操作环境中。为了提高求解效率和优化质量,研究者们已经开发了多种智能优化算法。例如,有些发明提出了一种改进的遗传算法,通过双种群共同进化策略和种群间的信息交流,有效帮助陷入局部最优的种群跳出困境,并通过实验验证了算法的有效性。有些发明则提出了一种基于非支配排序遗传算法的方法,建立了一个旨在同时最小化码头操作成本和碳排放成本的双目标优化模型。此外,有些发明采用了改进的遗传算法并结合贪婪插入算法来考虑缓冲区容量有限的问题,对缓冲区机械进行了优化分配。有些发明则设计了改进的灰狼优化算法,提高了泊位和岸桥调度的效率和精度。
3、尽管这些方法各有其优点,但它们在处理大规模组合优化问题时仍面临一些挑战。首先,这些算法容易陷入局部最优解,尤其是在参数选择和初值设定不理想的情况下。其次,现有的智能算法在计算效率和成本方面仍有限制,尤其是在复杂的实际应用场景中。此外,现有方法在动态适应性方面表现不足,难以应对港口环境中的频繁变化和突发事件。最后,虽然一些算法尝试进行了目标优化,但在综合考虑成本、时间、环境影响等方面的优化能力仍有待提升。
技术实现思路
1、本发明的目的是针对现有技术的缺陷,提供基于改进蜣螂优化算法的泊位岸桥调度方法,用于解决现有泊位岸桥调度方法中存在的缺陷,特别是提高解决方案的全局搜索能力和计算效率,同时增加算法的动态适应性。通过引入混合策略改进的蜣螂优化算法(idbo);
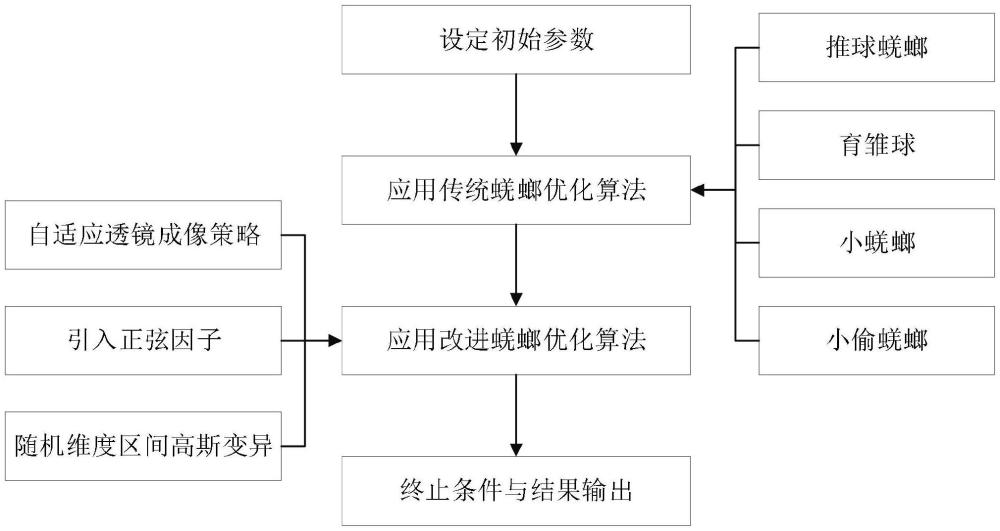
2、为实现上述目的,本发明提供了基于改进蜣螂优化算法的泊位岸桥调度方法,具体步骤如下:
3、s1:设定初始参数,包括泊位数量、岸桥资源、船舶到达时间及需求,并初始化每艘船的状态及其需求的岸桥资源;
4、s2:应用传统蜣螂优化算法:包括推球蜣螂、育雏球、小蜣螂、小偷蜣螂;
5、s3:应用改进蜣螂优化算法:包括自适应透镜成像策略、引入正弦因子、随机维度区间高斯变异;
6、s4:终止条件与结果输出:达到预设的迭代次数时,输出包括每艘船的最终泊位和岸桥分配详情。
7、作为本发明的一种优选技术方案,步骤s2中所述推球蜣螂步骤具体为:蜣螂会将找到的粪便堆成球,并将粪球推到目标位置,在推球时蜣螂的位置更新公式如下:
8、xi(t+1)=xi(t)+α×k×xi(t-1)+b×δx (1)
9、δx=|xi(t)-xw| (2)
10、其中,t表示当前迭代次数;xi(t)表示第i只蜣螂在第t次迭代时的位置;α是一个自然系数,表示对推球方向的影响,随机选取1或-1;k∈[0,1]表示位置偏转系数;b∈[0,1]表示随机常量;δx用于模拟光强变化,δx数值越高表示光强越弱;xw表示全局最差位置;
11、蜣螂在推球过程中,若遇到障碍物,则通过正切函数生成的偏转角以获得新的推球路线,蜣螂跳舞时的位置更新公式如下:
12、xi(t+1)=xi(t)+tanθ×|xi(t)-xi(t-1)| (3)
13、其中,θ∈[0,π],θ表示蜣螂偏转角度的随机数,当θ分别为0,π/2或π时,蜣螂不更新位置。
14、作为本发明的一种优选技术方案,步骤s2中所述育雏球的步骤具体为:
15、在粪球被推到目标位置后,引入动态边界策略模拟产卵区域:
16、lb*=max(x*×(1-r),lb) (4)
17、ub*=min(x*×(1-r),ub) (5)
18、其中,ub*和lb*表示产卵区域的上下界,x*表示当前局部最优位置,r=1-t/tmax且t表示当前迭代次数,tmax表示最大迭代次数,ub和lb表示优化问题的上下界;
19、将产卵区域确定后,雌性蜣螂将会根据定义的产卵区域进行产卵,且每只雌性蜣螂在每次迭代时只产一颗卵,同时育雏球的位置将会更新,育雏球位置更新公式如下:
20、bi(t+1)=x*+b1×(bi(t)-lb*)+b2×(bi(t)-ub*) (6)
21、其中,bi(t)表示第i只育雏球在第t次迭代时的位置,b1和b2为1×d的随机向量,d为优化问题的维度。
22、作为本发明的一种优选技术方案,步骤s2中所述小蜣螂的步骤具体为:
23、育雏球中的卵发育成小蜣螂后,将会爬出来寻找食物,同时通过动态边界策略对小蜣螂的最优觅食区域进行模拟,公式如下:
24、lbb=max(xb×(1-r),lb) (7)
25、ubb=min(xb×(1-r),ub) (8)
26、其中,ubb和lbb表示最优觅食区域的上下界,xb表示全局最优位置;
27、在定义最优觅食区域后,小蜣螂会根据定义的区域进行觅食,小蜣螂的位置更新公式如下:
28、xi(t+1)=xi(t)+c1×(xi(t)-lbb)+c2×(xi(t)-ubb) (9)
29、其中,xi(t)表示第i只小蜣螂在第t次迭代时的位置,c1∈(0,1)且为服从正态分布的随机数,c2∈(0,1)且为随机变量。
30、作为本发明的一种优选技术方案,步骤s2中所述小偷蜣螂的步骤具体为:蜣螂群体中的小偷蜣螂会从其他蜣螂那里偷取粪球,模拟小偷蜣螂的偷窃过程,进而满足dbo对最优位置附近区域的探索,其中,小偷蜣螂的位置更新公式如下:
31、xi(t+1)=xb+s×g×(|xi(t)-x*|+|xi(t)-xb|) (10)
32、其中,s表示常量,g表示服从正态分布的1×d随机向量。
33、作为本发明的一种优选技术方案,步骤s3中所述自适应透镜成像策略具体包含以下内容:
34、透镜成像的数学原理公式如下:
35、
36、其中,令h/h′=n,n为透镜成像的缩放因子,将n代入式(11)变化可得:
37、
38、将透镜成像的数学公式推广到dbo中,令dbo的上下界ub和lb代替参数a和b可得:
39、
40、缩放因子设置如下:
41、n=2×r (14)
42、其中r∈[0,1]且为随机变量,随机变量的引入增大了跳出局部最优的可能性,提高了算法的性能;
43、引入参数k和全局最优位置x*改进透镜成像,具体公式如下:
44、
45、f=2×r1×c (16)
46、
47、其中,r1∈[0,1]且为随机变量,t表示当前迭代次数,tmax表示最大迭代次数。
48、作为本发明的一种优选技术方案,步骤s3中所述引入正弦因子具体包含以下内容:
49、在步骤s2中所述的育雏球中引入正弦因子r2替换原有的参数r,公式如下:
50、
51、r1(t)=|-2×sinθ×c2| (19)
52、其中,r1(t)、r2(t)表示在第t次迭代时r1、r2的值,θ∈[0,2π]表示随机角度,将r2代入育雏球区域界定公式和小蜣螂区域界定公式,改进公式如下:
53、lb*=max(x*×(1-r2),lb) (20)
54、ub*=min(x*×(1-r),ub) (21)
55、lbb=max(xb×(1-r),lb) (22)
56、ubb=min(xb×(1-r),ub) (23)
57、其中,lbb和ubb为最优觅食区域的上下界。
58、作为本发明的一种优选技术方案,步骤s3中所述随机维度区间高斯变异具体包含以下内容:
59、随机维度高斯变异公式如下:
60、
61、其中,xbj(t)表示第t次迭代时全局最优位置的第j维度,j取值于一段连续的变异维度区间,区间随机生成,且区间长度小于等于优化问题的维度,xwj(t)表示第t次迭代时全局最差位置的第j维度,txbj(t)表示第t次迭代时全局最优位置第j维度变异后的位置,表示高斯变异算子,r2∈[0,1]且为随机变量;
62、为保证变异策略不会使全局最优位置变异为更差的位置,引入贪婪策略,对变异后的位置进行贪婪选择,只有当变异后的位置优于全局最优位置时才保留,贪婪选择公式如下所示,其中:
63、
64、其中,f(xb(t))表示全局最优位置在第t次迭代时的适应度值。
65、本发明与现有技术相比,具有如下有益效果:
66、提高全局搜索能力:利用自适应透镜成像策略和随机变量来扩大搜索范围,从而提高在非局部最优区域的搜索能力。
67、增强局部搜索效率:通过引入正弦因子和随机维度区间高斯变异来平衡探索与开发过程,增加算法的迭代周期内的随机性,从而提高算法的寻优精度和收敛速度。
本文地址:https://www.jishuxx.com/zhuanli/20240730/194339.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。