一种汽车风洞试验过程中异物异动监测方法与流程
- 国知局
- 2024-07-31 22:53:35
本发明属于风洞试验异物异动监测,尤其涉及一种汽车风洞试验过程中异物异动监测方法。
背景技术:
1、风洞试验是用于测试和优化汽车、无人机及其他运输工具的空气动力学性能,在风洞试验中,异物入侵会导致试验结果失真,影响试验结果,并有可能损害昂贵的设备和模型,因此,针对风洞试验中异物入侵需要有良好的解决方式。
2、现有的风洞试验常采用手动监控和基础传感器检测的方式,这种监控方式存在不足以实时、准确的检测异物,因此,对风洞中的异物异动实施有效的监测非常重要。
技术实现思路
1、本发明所解决的技术问题在于提供一种汽车风洞试验过程中异物异动监测方法,以解决现有技术在风洞试验过程中无法有效监测异物异动的问题。
2、本发明提供的基础方案:一种汽车风洞试验过程中异物异动监测方法,包括:
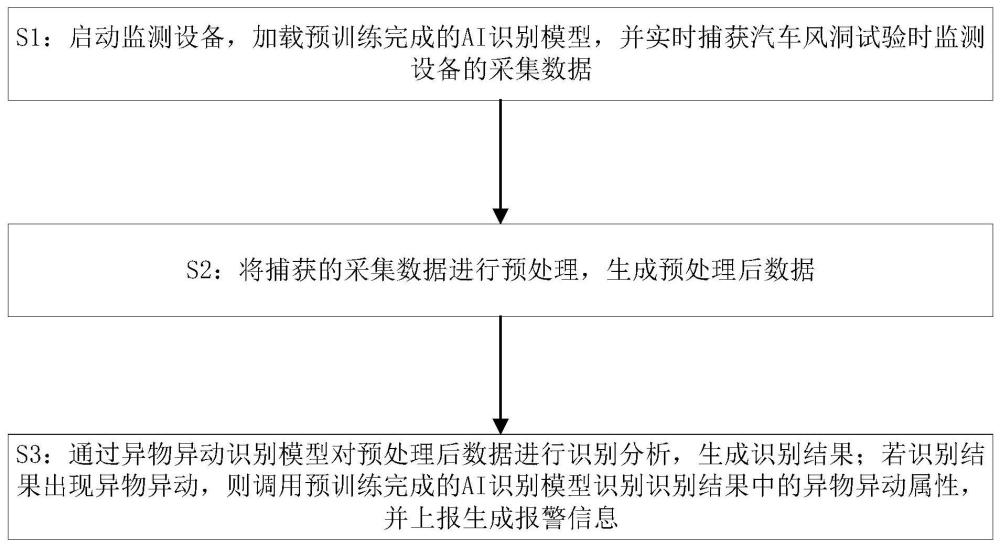
3、s1:启动监测设备,加载预训练完成的ai识别模型,并实时捕获汽车风洞试验时监测设备的采集数据;
4、s2:将捕获的采集数据进行预处理,生成预处理后数据;
5、s3:通过异物异动识别模型对预处理后数据进行识别分析,生成识别结果;若识别结果出现异物异动,则调用预训练完成的ai识别模型识别识别结果中的异物异动属性,并上报生成报警信息。
6、进一步,所述监测设备包括视频图像监测模块和传感器监测模块,所述s1包括:
7、s1-1:将视频图像监测模块和传感器监测模块初始化后,布设在风洞的关键位置,并通过图像稳定算法对视频图像监测模块进行优化,以捕获风洞试验过程中的精确视频图像数据及环境变化数据;
8、s1-2:基于深度神经网络yolo构建ai识别模型,并调取风洞试验的历史数据中的异物异动特征数据集对ai识别模型进行训练。
9、进一步,所述s1-1包括:
10、s1-1-1:使用harris角点检查视频图像监测模块监测的图像的特征点,并进行特征点匹配和跟踪目标运动,分析图像相邻帧之间的运动,并进行运动匹配;
11、s1-1-2:使用平滑后的运动参数对图像每一帧进行几何变换,使其与前一帧对齐。
12、进一步,所述s1-1-1具体为:
13、harris角点计算步骤:在视频图像监测模块的监测窗口同时向水平和垂直方向异动时,计算窗口内部的像素变化量,计算公式为:
14、
15、其中,e(x,y)表示像素变化量,w(u,v)表示监测窗口中每个格中的数值,u表示横坐标,v表示纵坐标,监测窗口共有u*v个格子;i(u,v)表示其中某个点的灰度值,当其移动一个(x,y)的距离后,灰度值的变化为:i(u+x,v+y)-i(u,v);
16、对于每个窗口,都计算其对应的一个角点相应函数r:
17、r=λ1λ2-k(λ1+λ2)2
18、其中λ1,λ2是图像角化处理后的变化分量,k表示harris系数,一般取值0.04~0.06;
19、若r>0,则表示该窗口对应一个角点特征,若r<0,则表示图像的边界,若r=0,则表示平坦区域;
20、遍历所有图像角点的特征点,完成图像的特征点匹配;
21、执行运动匹配,计算公式为:
22、
23、其中,d(i,j)表示第j个detection和第i条轨迹之间的运动匹配度,dj表示第j个检测的状态,yi表示轨迹在当前时刻的预测值,t表示目标跟踪集合,表示轨迹,它是由kalman滤波器预测得到的一个常量。
24、进一步,所述s1-2包括:
25、将待识别的异物异动特征数据集划分为训练集和测试集;
26、基于yolo模型构建ai识别模型,并在ai识别模型中加入残差网络和wca模块;所述wca模块通过对输入的异物异动特征数据集进行全局平均池化操作;再进行卷积核大小为k的一维卷积操作,并经过激活函数得到各个通道的权重;
27、引入eouc损失函数替换ai识别模型原有的损失函数,并通过训练集对加入残差网络和wca模块的ai识别模型进行训练;
28、训练完成后将测试集输入ai识别模型中,输出结果,得到训练完成的针对风洞试验过程中异物异动识别的ai识别模型。
29、进一步,所述经过激活函数得到各个通道的权重具体为:
30、ω=σ(c1dk(y))
31、其中,c1dk为快速一维1d卷积,y表示通道,σ表示激活函数;
32、所述eouc损失函数表达公式为:
33、
34、其中,ldis为预测框和真实框的中心距离损失,liou为预测框和真实框的重叠损失,lasp为预测框和真实框的宽高损失,iou是在特定数据集中检测相应物体准确度标准,w、h、d是权重,p是激活函数,和分别为真实框与预测框的最小外接矩形高度与宽度,c2为和的平方和,dgt表示目标框中心点坐标,wgt表示目标框宽度信息,hgt表示目标框高度信息。
35、进一步,所述s2中预处理包括图像预处理和传感器数据标准化处理。
36、进一步,所述s3包括:
37、s3-1:读取优化后的精确视频图像数据及环境变化数据,根据汽车风洞流道区域内的视频图像数据在降雨试验前画面的稳定特性,设定帧数阈值,建立试验背景画面;
38、s3-2:获取视频图像数据当前帧与背景相减后的差值图像,进行形态学操作后生成多个连通区域,并根据连通区域的面积排除汽车风洞内的固定设施,生成区域的二值图像;
39、s3-3:将剩余的区域存入异物队列中,并在后续帧中对异物队列中的异物进行持续跟踪;
40、s3-4:通过计算不同物体坐标件的距离、灰度图间的匹配度和rain矩间的匹配度,统计异物队列中每个异物存在的帧数、消失的帧数;
41、s3-5:若在空白区域检测到新的物体,则将其加入到异物队列中,并对其进行持续追踪,若该物体持续存在且坐标变化,将其判断为区域入侵,并根据ai识别模型判断入侵物的类别;
42、s3-6:若异物连续消失帧数超过预设的帧数阈值后,将其从异物队列中剔除;
43、s3-7:若异物存在帧数超过预设的帧数阈值后,判断该异物为遗留物,调用ai识别模型对遗留物进行识别。
44、进一步,所述不同物体坐标件的距离计算公式为:
45、
46、所述灰度图间的匹配度计算公式为:
47、
48、所述rain矩间匹配度计算公式为:
49、
50、其中,n是物体的数量,cj为第j个物体的横坐标或纵坐标,ci是第j个物体的第i个像素的横坐标或纵坐标,n是第j个物体的像素个数,p和q是被比较的两个物体;k表示rain矩分量个数,表示p物体rain矩的第k个分量,表示q物体rain矩的第k个分量,m表示灰度直方图的范围,s表示灰度直方图的像素个数,表示p物体的灰度直方图中s灰度的像素个数,表示q物体的灰度直方图中s灰度的像素个数。
51、本发明的原理及优点在于:本发明中,首先对监测设备进行初始化后安置在风洞的关键位置,以确保能够获取到风洞试验过程中的完整视频图像数据和环境变化数据,同时,对于监测设备中的视频图像监测模块,采用图像稳定算法进行监测过程的优化,以降低视频图像监测模块在监测过程中由于运动引起的不必要的抖动和失真,从而使得能够得到图像视频稳定流畅的数据,提高风洞试验中异物异动监测的准确性;
52、而在针对获取的视频图像数据的异物异动监测过程中,通过异物异动识别算法对异物进行检测,并调用训练完成ai识别模型进行异物属性的识别,使得监测过程智能,效率高,监测结果准确。
53、因此,本发明的优势在于:
54、1、减少了风洞试验对人工干预的依赖,大大提高了异物异动检测的速度和准确性,节省了时间和资源;
55、2、通过异物异动识别算法和ai识别模型,能够实时检测异物,并迅速做出反应,确保风洞试验的准确性和安全性;
56、3、本技术在使用过程中,会积累大量数据,这些数据能够进一步优化算法和提高检测准确性;
57、4、解决了现有技术在风洞试验过程中无法有效监测异物异动的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240730/195209.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。