一种基于FPGA的手术导航靶标特征点提取方法及设备与流程
- 国知局
- 2024-07-31 22:53:27
本发明涉及医疗光学定位系统领域,具体为一种基于fpga的手术导航靶标特征点提取方法及设备。
背景技术:
1、随着高清医学影像技术的成熟以及医疗领域对手术精细化和微创化的注重,使用手术导航定位系统辅助医生手术已成为医疗领域发展的必然趋势。手术导航定位系统最核心的部分是光学定位跟踪技术,其可在手术中监测的靶标的位置信息,实现对病变位置的定位处理,从而保障医疗手术的安全性和可靠性。
2、目前,光学定位设备通常采用特征提取、双目匹配和三维重建等核心算法来实现手术靶标的实时定位跟踪,具体的,通过核心算法对图像采集的像素点集合处理、再对像素点集进行特征点聚类等,因此,硬件处理器运算核心算法的耗时较长,这就会造成定位追踪信息稍有延时,即手术导航定位系统的实时性较差。
技术实现思路
1、本发明的目的在于提供一种基于fpga的手术导航靶标特征点提取方法及设备,旨在改善现有手术导航定位系统在对像素点进行处理时耗时较长,导致定位的实时性较差的问题。
2、本发明是这样实现的:一种基于fpga的手术导航靶标特征点提取方法,包括
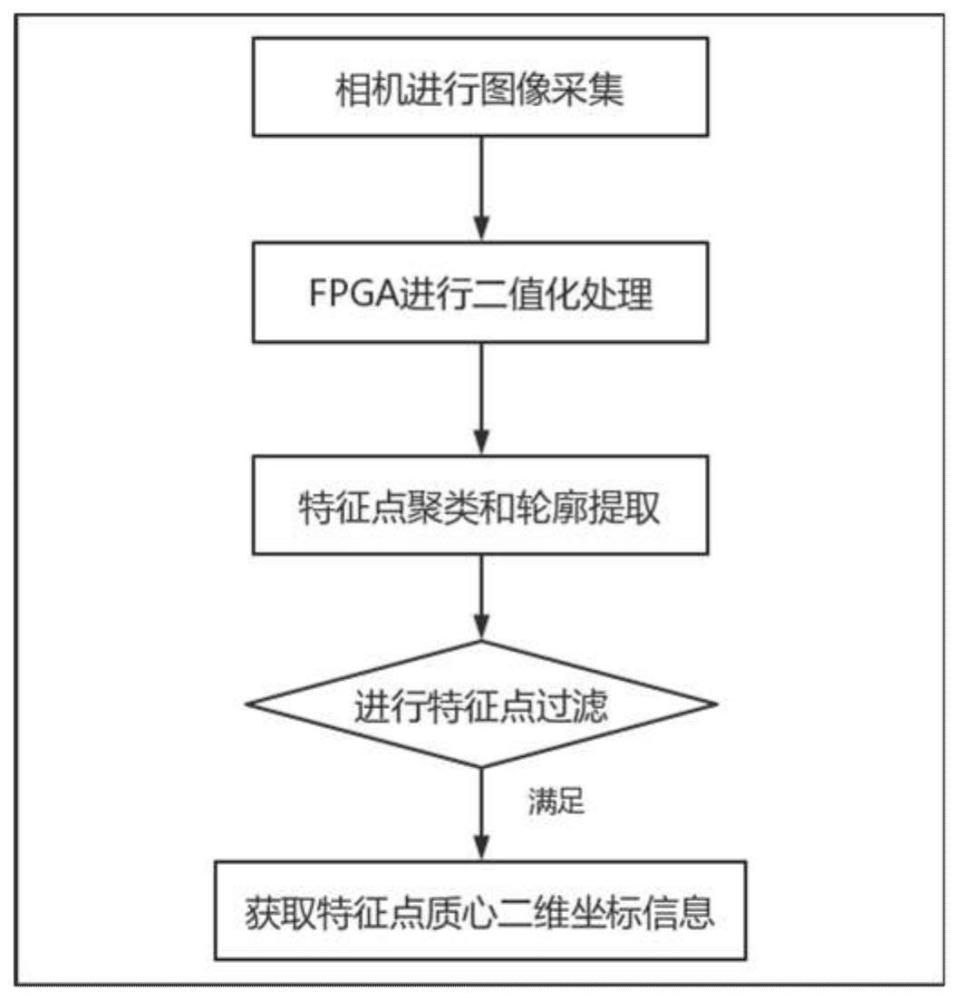
3、步骤一:利用相机和红外led补光灯对手术导航靶标进行实时的2d图像采集,并将采集的信息传输至硬件fpga;
4、步骤二:硬件fpga对图像数据进行二值化处理,并保存符合二值化阈值要求的像素点信息;将这些像素点构成像素点集合;
5、步骤三:对像素点集合中的像素点进行逐个判断,判断当前像素点是否与上一像素点构成行连通区域或块连通区域;
6、步骤四:若步骤三中未构成行连通区域或块连通区域,则将当前像素点添加至新建特征点像素点集合中;
7、步骤五:遍历每个特征点集合中的每一行像素点,判断当前行与上下行的边界,并提取符合条件的像素点形成特征点外轮廓;
8、步骤六:约束特征点几何信息,过滤噪点信息,最后对符合要求的特征点进行质心位置求解。
9、优选的,在对图像数据二值化处理前,确定灰度阈值,提取灰度值大于阈值的像素点。
10、优选的,将灰度值大于阈值的像素点的信息保存为<x,y,gray>,且得到满足灰度阈值约束的所有像素点集合。
11、优选的,依据每个像素点存储的<x,y>信息,判断当前像素点是否与上一个像素点构成行连通区域,如果可以构成行连通区域则将该像素点添加到对应特征点像素点集合中。
12、优选的,若无法构成行连通区域,则依据每个像素点存储的<x,y>信息,判断当前像素点是否与某个行连通区域构成块连通区域,如果可以构成块连通区域则将当前像素点添加到其对应的特征点像素点集合中。
13、优选的,若无法构成块连通区域,则依据每个像素点存储的<x,y>信息,将当前像素添加到一个新建特征点像素点集合中。
14、优选的,通过判断是否形成行连通区域、块连通区域或新建特征点像素点集合,最终聚类划分出所有特征点对应像素点集区域。
15、优选的,依次遍历特征点的每一行像素点,判断当前行与上一行或者下一行的左右边界<x,y>情况,将满足外轮廓提取条件的像素点<x,y>信息按照特征点外轮廓顺时针的方式保存。
16、优选的,依次判断每个特征点的面积、圆度、惯性率和凸度等信息,当特征点对应的几何信息不符合提取阈值要求时就会被过滤掉,最后对满足要求的特征点依据下列公司进行质心位置求解
17、求矩公式:mij=∑x∑yxiyjf(x,y)
18、质心求解:{x,y}={m10/m00,m01/m00}。
19、优选的,包括led补光灯、相机和电路板,电路板设置在壳体中,且在电路板上设置有fpga电路,相机设置有两台,且两台相机分别设置在led补光灯的两侧,相机和led补光灯正对壳体的透视窗口设置,且与电路板电性相连。
20、与现有技术相比,本发明的有益效果是:采用基于fpga的手术导航靶标特征点提取方法以及把轮廓提取和过滤,可以有效降低处理器特征提取算法的计算时间,显著提高光学定位设备的实时追踪性和医疗手术的安全性,节省处理器的资源配置。
技术特征:1.一种基于fpga的手术导航靶标特征点提取方法,其特征在于,包括
2.根据权利要求1所述的一种基于fpga的手术导航靶标特征点提取方法,其特征在于,在对图像数据二值化处理前,确定灰度阈值,提取灰度值大于阈值的像素点。
3.根据权利要求2所述的一种基于fpga的手术导航靶标特征点提取方法,其特征在于,将灰度值大于阈值的像素点的信息保存为<x,y,gray>,且得到满足灰度阈值约束的所有像素点集合。
4.根据权利要求3所述的一种基于fpga的手术导航靶标特征点提取方法,其特征在于,依据每个像素点存储的<x,y>信息,判断当前像素点是否与上一个像素点构成行连通区域,如果可以构成行连通区域则将该像素点添加到对应特征点像素点集合中。
5.根据权利要求4所述的一种基于fpga的手术导航靶标特征点提取方法,其特征在于,若无法构成行连通区域,则依据每个像素点存储的<x,y>信息,判断当前像素点是否与某个行连通区域构成块连通区域,如果可以构成块连通区域则将当前像素点添加到其对应的特征点像素点集合中。
6.根据权利要求5所述的一种基于fpga的手术导航靶标特征点提取方法,其特征在于,若无法构成块连通区域,则依据每个像素点存储的<x,y>信息,将当前像素添加到一个新建特征点像素点集合中。
7.根据权利要求6所述的一种基于fpga的手术导航靶标特征点提取方法,其特征在于,通过判断是否形成行连通区域、块连通区域或新建特征点像素点集合,最终聚类划分出所有特征点对应像素点集区域。
8.根据权利要求7所述的一种基于fpga的手术导航靶标特征点提取方法,其特征在于,依次遍历特征点的每一行像素点,判断当前行与上一行或者下一行的左右边界<x,y>情况,将满足外轮廓提取条件的像素点<x,y>信息按照特征点外轮廓顺时针的方式保存。
9.根据权利要求8所述的一种基于fpga的手术导航靶标特征点提取方法,其特征在于,依次判断每个特征点的面积、圆度、惯性率和凸度等信息,当特征点对应的几何信息不符合提取阈值要求时就会被过滤掉,最后对满足要求的特征点依据下列公司进行质心位置求解
10.一种光学定位追踪装置,使用于如权利要求1所述的方法,其特征在于,包括led补光灯、相机和电路板,电路板设置在壳体中,且在电路板上设置有fpga电路,相机设置有两台,且两台相机分别设置在led补光灯的两侧,相机和led补光灯正对壳体的透视窗口设置,且与电路板电性相连。
技术总结本发明公开了一种基于FPGA的手术导航靶标特征点提取方法及设备,步骤一:利用相机和红外LED补光灯对手术导航靶标进行实时的2D图像采集,并将采集的信息传输至硬件FPGA;步骤二:硬件FPGA对图像数据进行二值化处理,并保存符合二值化阈值要求的像素点信息;将这些像素点构成像素点集合;步骤三:对像素点集合中的像素点进行逐个判断,判断当前像素点是否与上一像素点构成行连通区域或块连通区域;步骤四:若步骤三中未构成行连通区域或块连通区域,则将当前像素点添加至新建特征点像素点集合中;本发明采用基于FPGA的手术导航靶标特征点提取方法以及把轮廓提取和过滤,可以有效降低处理器特征提取算法的计算时间,显著提高光学定位设备的实时追踪性和医疗手术的安全性,节省处理器的资源配置。技术研发人员:苗庆伟,卢泮苹,贺文强,李杰受保护的技术使用者:河南埃尔森智能科技有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/195201.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。