一种基于1DCNN和Transformer的多传感器智能行为识别算法的制作方法
- 国知局
- 2024-07-31 22:53:21
本发明涉及人员行为识别,具体是一种基于1dcnn和transformer的多传感器智能行为识别算法。
背景技术:
1、在高压电线作业以及高空建筑施工时,工人需要佩戴安全帽、安全绳等防护措施才能开展高空作业。但是由于自身原因,如安全意识薄弱,身体健康状态不佳,马虎大意等,以及高空作业复杂的施工环境,如大风大雨、温差大等外部因素,使得作业人员在施工过程中,仍存在忘记佩戴、佩戴不规范、无法佩戴安全措施的情况,导致高空作业安全事故时有发生。随着无线传感器技术、多数据融合以及人工智能技术的发展,针对高空作业人员行为监测与安全防护的技术在过去的几年中取得了很大的发展。但是,传统的行为识别方法依赖于摄像头进行数据采集,需要极大的数据传输与处理资源,极大地限制了其在户外高空作业场景中的应用。针对当前行为识别方法存在的不足,有必要提出一种精确度高、部署简易、成本低的智能行为识别方法,从而有效保护作业工人的生命财产安全。
技术实现思路
1、针对现有行为识别技术的不足,本发明提供了一种基于1dcnn和transformer的多传感器智能行为识别算法。
2、为实现上述目的,本发明提供了如下技术方案:
3、本发明提供了一种基于1dcnn和transformer的多传感器智能行为识别算法,包括如下步骤:无线传感器网络采集监测对象的速度、加速度、旋转角度、角速度、振动等行为动作数据;将采集的行为动作数据进行预处理,包括滤波、数据分帧、去时延;将预处理后的数据作为一维卷积层的输入,提取初级特征;然后使用transformer编码器层进行数据融合与高级特征提取;最后将得到的高级特征经过一层全连接层输出最终的行为识别结果。
4、本发明具体步骤如下:
5、步骤1:通过无线传感器网络中配备的加速度计、陀螺仪、振动传感器,采集目标监测对象的速度、加速度、角速度、振动等行为动作数据。涉及到的行为动作有正常的行走、下蹲、起立、转身等,还包括异常的跌倒、坠落等危险行为。
6、步骤2:对步骤1采集到的行为动作数据进行预处理,包括滤波、数据分帧以及去时延处理;
7、步骤3:将预处理后的行为动作数据,按照比例划分为训练集、测试集和验证集;
8、步骤4:构建面向多传感器数据融合智能行为识别的1dcnn-transformer神经网络模型,将预处理后的行为动作数据作为输入,将对应的行为动作作为标签。
9、步骤5:用步骤3所得的训练集训练步骤4的多传感器数据融合智能识别神经网络模型;
10、步骤6:用步骤3所得的测试集输入到步骤5所得的智能识别神经网络模型中,将其输出结果与测试集中对应的行为动作标签进行对比,得到模型的对比结果;
11、步骤7:根据步骤6所得的测试集的对比结果,对步骤5所得智能识别模型进行修正,包括每层神经元个数、权重等,得到最终的智能识别模型;
12、步骤8:用步骤3所得的验证集来验证步骤7所得模型的性能优劣,选取交叉熵最小的模型作为最终的智能行为识别模型;
13、步骤9:使用步骤8所得的最优模型预测出新的行为动作数据对应的行为,完成行为识别。
14、进一步地,步骤1所述的加速度计、陀螺仪、振动传感器可嵌入到安全帽、安全服、安全带等防护设施中,不增加作业人员的佩戴负担。
15、进一步地,步骤2所述的滤波方法采用小于50hz低通滤波器,所述的数据分帧是按照每一秒钟进行数据长度切割的方式,所述的去时延是通过傅里叶变换方法进展,以保证各传感器数据时间同步。
16、进一步地,步骤3按照70:15:15比例划分成训练集、测试集和验证集。
17、进一步地,步骤4所述的多传感器智能识别算法卷积神经网络模型包含一个初级特征提取层、数据融合与高级特征提取模块,和一个全连接分类器。
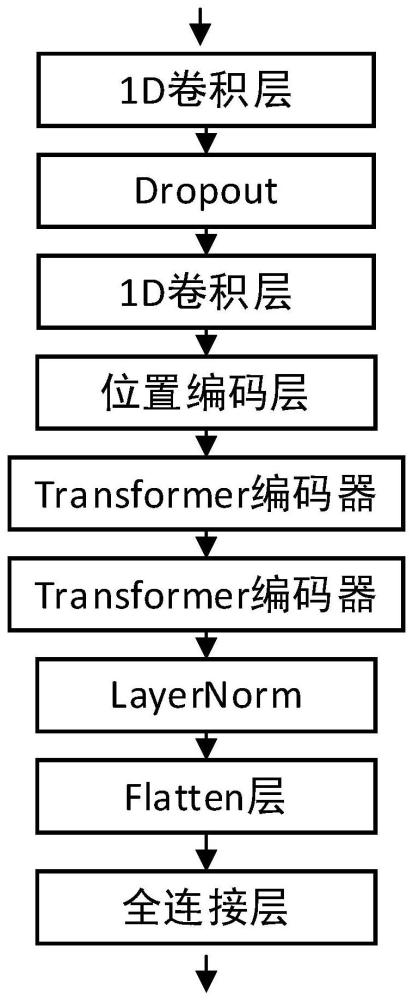
18、进一步地,所述的初级特征提取层包含了两个32xn的一维卷积层(n为输入的传感器种类数),采用relu激活函数,得到初级动作特征。
19、进一步地,所述的数据融合与高级特征提取模块,包括一个位置编码层、两个transformer编码器层,一个layer归一化层以及一个flatten层,得到高级动作特征。
20、进一步地,所述的高级动作特征输入到全连接层进行最终的行为动作。
21、进一步地,所述的多传感器信息融合智能识别算法神经网络模型使用的目标损失函数为交叉熵损失函数。
22、本发明的有益效果:
23、本发明提供了一种基于卷积神经网络的多传感器智能行为识别算法,有效解决传统的基于视频识别的技术部署不便、成本高等不足。通过将采集的设备嵌入到安全帽、安全服以及安全绳中,无须佩戴额外的终端设备,不增加监测对象的佩戴负担,且不影响施工人员的正常作业。
24、特别指出的是,本发明所提供的一种基于1dcnn和transformer的多传感器智能行为识别算法,不仅可用于高空作业场景,凡涉及多传感器行为识别领域都应受到保护。
技术特征:1.一种基于1dcnn和transformer的多传感器智能行为识别算法,其特征在于,所述智能行为识别算法通过无线传感器网络采集目标监测对象的速度、加速度、旋转角度、角速度、振动等行为动作数据;将采集的行为动作数据进行预处理,包括滤波、数据分帧、去时延;将预处理后的数据作为一维卷积层的输入,提取初级特征;然后使用transformer编码器层进行数据融合与高级特征提取;最后将得到的特征经过一层全连接层输出最终的行为识别结果。
2.根据权利要求1所述一种基于1dcnn和transformer的多传感器智能行为识别算法,其特征在于,具体步骤如下:
3.根据权利要求2所述一种基于1dcnn和transformer的多传感器智能行为识别算法,其特征在于,步骤1所述的加速度计、陀螺仪、振动传感器可嵌入到安全帽、安全服、安全带等防护设施中,不增加作业人员的佩戴负担,不影响到作业人员的正常操作。
4.根据权利要求2所述一种基于1dcnn和transformer的多传感器智能行为识别算法,其特征在于,步骤2所述的滤波方法采用小于50hz低通滤波器,所述的数据分帧是按照每一秒钟进行数据长度切割的方式,所述的去时延是通过傅里叶变换方法进展,以保证各传感器数据时间同步。
5.根据权利要求2步骤4所述的多传感器智能识别算法卷积神经网络模型包含一个初级特征提取层、数据融合与高级特征提取模块,和一个全连接分类器。
6.根据权利要求5所述的初级特征提取层包含了两个32xn的一维卷积层(n为输入的传感器种类数),采用relu激活函数,得到初级动作特征。
7.根据权利要求5所述的数据融合与高级特征提取模块,包括一个位置编码层、两个transformer编码器层,一个layer归一化层以及一个flatten层,得到高级动作特征。
8.根据权利要求1所述的高级动作特征输入到全连接层进行最终的行为动作。
技术总结本发明公开了一种基于1DCNN和Transformer的多传感器智能行为识别算法,包括如下步骤:无线传感器网络采集监测对象的速度、加速度、旋转角度、角速度、振动等行为动作数据;将采集的行为动作数据进行预处理,包括滤波、数据分帧、去时延;将预处理后的数据作为一维卷积层的输入,提取初级特征;然后使用Transformer编码器层进行数据融合与高级特征提取;最后将得到的高级特征经过一层全连接层输出最终的行为识别结果。本发明可用于高空作业人员的行为动作进行识别,及时发现不规范操作,避免危险事故发生,具有高准确性、适用范围广等优点。技术研发人员:陈杰,曹雷,徐鹏,田纯青,吴平利,王领良受保护的技术使用者:广州南方电力集团科技发展有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/195193.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表