一种基于深度学习的卫星故障模式识别及寿命预测方法与流程
- 国知局
- 2024-07-31 23:15:36
本发明属于设备故障预测与健康管理,涉及一种基于深度学习的卫星故障模式识别及寿命预测方法。
背景技术:
1、卫星在轨运行健康状态通常由不同的性能参数反映,随着卫星设计、试验不断完善和测控手段日趋改进,目前,卫星在轨运管部门和设计部门积累了大量的在轨运行数据、试验数据和故障问题记录,但目前卫星的故障判别仅限于常数阈值判定,多源数据并未得到充分的挖掘和利用,多用于故障发生后的排查。同时,卫星寿命预测并未实现动态化,通常根据一段时间内的性能参数波动范围是否超限来对当前健康状态进行定性判断,难以预估未来在轨寿命。在多源数据背景下,如何利用卫星多阶段、多类型性能数据,构建科学合理的特征参数,实现对卫星在轨状态的定量判读和寿命预测,辅助识别卫星在轨运行的薄弱环节,为卫星在轨运行维护提供决策支持,成为当前卫星研制和运管部门亟待解决的问题。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出一种基于深度学习的卫星故障模式识别及寿命预测方法,实现卫星多源数据融合,并基于此开展在轨剩余寿命预测,解决在轨卫星性能状态定量准确评估和寿命估计的问题。
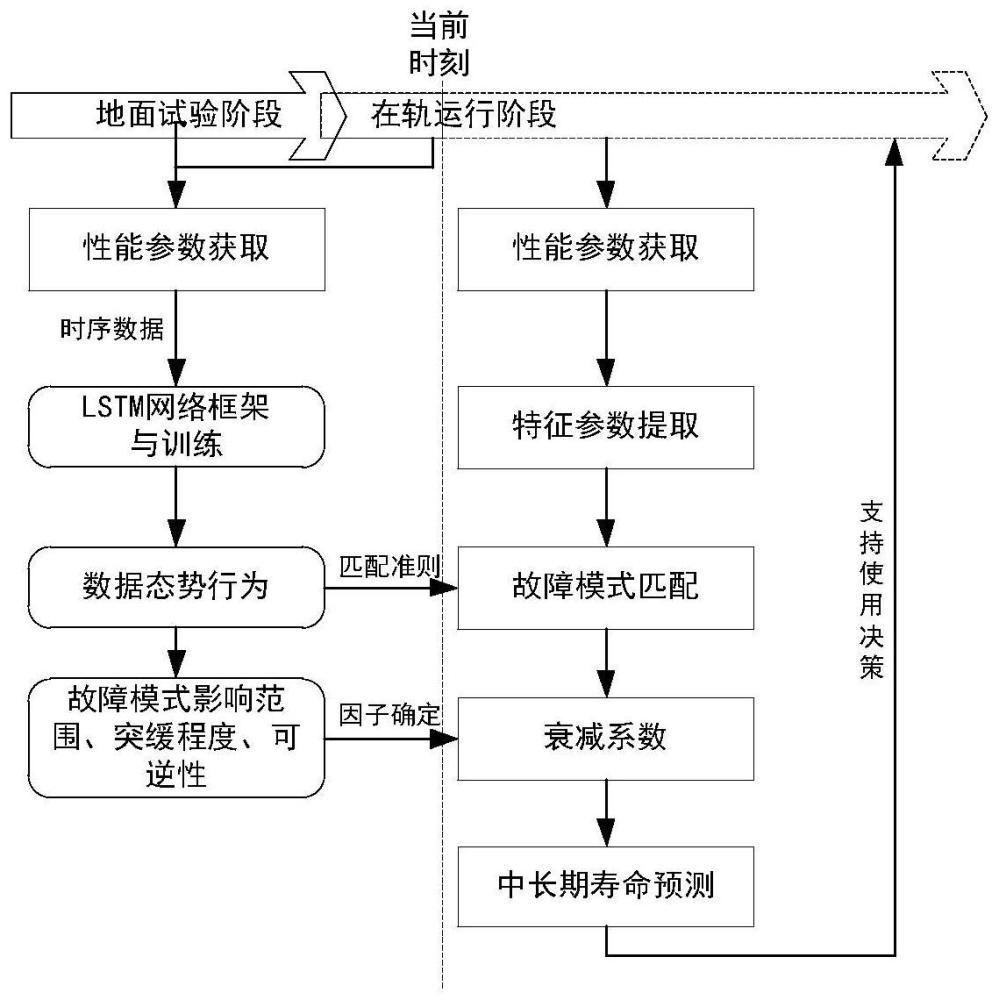
2、一种基于深度学习的卫星故障模式识别及寿命预测方法,包括在轨运行阶段的步骤:
3、s1、确定关键单机具有衰退特征的n种性能参数;
4、s2、在当前时刻t下,获取t时刻以及t时刻之前的n种性能参数,得到n个性能参数列向量,以n个性能参数列向量为输入,利用基于长短期记忆神经网络的特征参数提取模型,输出m个特征参数到设定的分类器中,其中,每个特征参数是故障模式i关联的mi种性能参数的耦合结果,i=1,2,…,m,m为故障模式数量,mi<n;
5、s3、t加1,重复步骤s2,得到下一时刻的m个特征参数并输入到分类器中,直到t到达预设迭代次数td;
6、s4、分类器收集得到包含td个时刻的m组特征参数序列并分别进行拟合,根据特征参数在时序上体现的递增、递减以及跳变趋势匹配最符合的故障模式;
7、s5、针对匹配的故障模式,获取对应故障模式下的影响范围因子、突变缓变程度因子、可逆性因子,确定衰减系数l;
8、s6、结合衰减系数l采用最小二乘法分别对匹配故障模式下关联的所有性能参数变化趋势进行曲线拟合,并与对应的性能参数阈值比对,确定出关联的各种性能参数对应的失效时间,取其中最小的失效时间作为此关键单机的寿命。
9、进一步的,所述基于长短期记忆神经网络的特征参数提取模型在卫星地面试验阶段构建,构建过程如下:
10、获取关键单机在卫星地面试验阶段具有衰退特征的不同时刻下的n种性能参数,确定n种性能参数的长度系数τk,k=1,2,…,n,其中,所述长度系数τk:若某一性能参数的变化趋势为按年衰减,τk取0~12,若某一性能参数的变化趋势为按月衰减,τk取15~30;
11、收集时刻t、时刻t-1、…、时刻t-τ1对应的第一种性能参数x1(t),x1(t-1),…,x1(t-τ1),得到列向量x1;收集时刻t、时刻t-1、…、时刻t-τ2对应的第二种性能参数x2(t),x2(t-1),…,x2(t-τ2),得到列向量x2,以此类推,得到列向量xn;列向量x1、x2、xn共同构成输入集xt;
12、根据当前时刻模型的输入集xt与上一时刻短期记忆ht-1计算记忆力度rt、更新力度it、新增记忆nct,根据记忆力度rt、更新力度it、新增记忆nct以及上一时刻长期记忆ct-1计算当前时刻的长期记忆ct:
13、ct=rt·ct-1+it·nct
14、计算输出力度ot:
15、ot=f(wo·xt+uo·ht-1+bo)
16、上式中,wo是当前输入集xt计算输出力度ot的权重矩阵、uo是上一时刻短期记忆ht-1计算输出力度ot的权重矩阵,bo为输出力度模型偏置项;
17、计算当前时刻的短期记忆ht,作为特征提取模型输出的特征参数:
18、ht=ot·tanhct。
19、进一步的,在卫星地面试验阶段训练特征参数提取模型,训练过程如下:
20、第一步、在地面极限拉偏试验和加速寿命试验中监测n种性能参数的状态,识别各种故障模式发生的时刻,获取标签数据;
21、第二步、在特征提取模型输入端,输入n个性能参数列向量:
22、[x1(t) ...... x1(t-τ1)]t
23、…
24、[xn(t) ...... xn(t-τn)]t
25、第三步、从标签数据中提取所需时刻的m种故障模式发生状态,在特征提取模型输出端,输入m个故障模式发生状态列向量:
26、[p1(t)=1 …… p1(t-τmax)=1]t
27、…
28、[pm(t)=0 …… pm(t-τmax)=1]t
29、其中,p1表示第一种故障模式,pm表示第m种故障模式,τmax为τ1~τn的最大值,1表示故障发生,0表示故障不发生;
30、第四步、以第二步、第三步的输入数据作为训练集对模型进行训练,获得反映n个性能参数信息的m个特征参数,以及特征参数与故障模式之间的对应关系。
31、进一步的,所述分类器具体为:
32、根据发生故障模式i时对应的特征参数在时序上的递增、递减或跳变规律,建立故障模式i与对应的特征参数时序数列之间的匹配准则,i=1,2,…,m;
33、接收并按时序积累不同时刻t下特征参数提取模型输出的特征参数,得到m个特征参数时序数列,分别拟合每个特征参数时序数列,将拟合结果与对应的匹配准则作对比,得到每个特征参数时序数列与对应故障模式之间的匹配概率,以匹配概率最高的故障模式作为识别结果输出。
34、进一步的,所述衰减系数l的计算方式为:
35、l(t)=1±1/(w1·q1+w2·q2+w3·q3)1+t
36、上式中,q1为影响范围因子,表示该故障模式发生时对上级系统的影响程度;q2为突变缓变程度因子,表示该故障模式发生时导致单机丧失功能的快慢;q3为可逆性因子,表示该故障模式发生时能通过重启恢复正常状态的程度;w1为影响范围因子的权重值,w2为突变缓变程度因子的权重值,w3为可逆性因子的权重值,t为时间。
37、进一步的,权重值w1、w2、w3按照以下原则进行设置:
38、判断关键单机是否配备冗余,若冗余手段已丧失,加大影响范围因子的权重w1;
39、判断是否为快速耗损类故障,若已开始发生快速耗损,加大突变缓变程度因子权重w2;
40、判断故障是否可逆,若为不可逆硬故障,加大可逆性因子权重w3。
41、进一步的,所述对匹配故障模式下关联的所有性能参数变化趋势进行曲线拟合,具体如下:
42、y=l(t)(a·x2+b·x)+c
43、上式中,x为当前进行拟合的性能参数;a、b、c分别为该性能参数的二、项系数、一次项系数、常数项,由最小二乘拟合算法计算得出;y为拟合得到的性能参数变化趋势曲线。
44、进一步的,卫星地面试验阶段、在轨运行阶段获取的性能参数均包括临界状态条件下记录的性能参数值和正常运行过程中记录的性能参数值。
45、进一步的,在轨运行阶段中,当特征参数的时序变化态势与m种故障模式均不匹配时,执行以下操作:
46、在分类器中追加新发生的故障模式,故障模式种类变成m+1种;
47、分析性能参数在发生新的故障模式前的变化态势,并引入特征提取模型中进行训练;
48、在分类器中制定特征参数与新的故障模式之间的分类匹配准则。
49、本发明与现有技术相比的有益效果是:
50、(1)本发明创新提出了通过卫星关键单机融合地面试验数据、在轨数据性能参数数据,采用长短时记忆网络刻画时序变化的数据特征,提取形成特征参数,并刻画不同故障模式下特征参数的数据动态行为,形成故障模式与特征参数动态行为的关联映射。
51、(2)本发明创新提出了基于衰减系数的中长期寿命预测方法,衰减系数与故障模式的影响范围、突变缓变程度、可逆性等因素相关联,实现了面向不同故障模式的差异化、精细化寿命预测,且随时间动态时变,有效提升了寿命预测的精准性和动态性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/196668.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。