一种基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法与流程
- 国知局
- 2024-07-31 23:32:15
本发明涉及,特别涉及一种基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法。
背景技术:
1、对于前列腺癌的诊断,前列腺活检机器人将大大提升了前列腺癌手术的质量和效率。但是前列腺活检机器人在实际的工作环境中,其控制精度往往会受到各种不确定因素的影响。比如机器人关节零件的磨损,润滑环境的变化,动力学建模的误差以及活检过程中病人的活动。这些不确定因素一部分来自机器人系统内部的扰动,一部分来自外界环境变化带来的外部扰动。这些扰动将极大影响前列腺活检机器人的控制性能,进而影响手术的顺利进行。
2、前列腺活检机器人是一种典型的非线性时变系统,对于前列腺活检机器人的控制,已有例如pid控制技术、滑模控制技术等多种控制技术。pid控制由于对动态模型的依赖程度低而得到了广泛的应用,但在非线性摩擦和外界干扰的情况下,pid控制效果并不理想。滑模控制容易产生抖振,影响控制精度。
技术实现思路
1、本发明公开了一种基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法,具体方法如下:
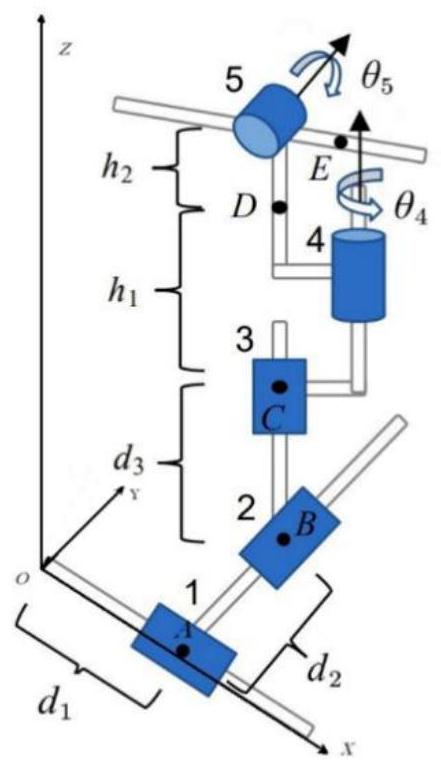
2、简化活检机器人,建立活检机器人动力学模型;
3、分解动力学模型,获取标称控制项、扰动控制项和外部穿刺扰动项;
4、根据标称控制项和扰动控制控,构建活检机器人第一鲁棒控制器;
5、以第一鲁棒控制器控制活检机器人进行试验穿刺,获取穿刺时的控制误差样本数据;
6、以误差样本数据训练径向基神经网络模型,以训练完成的径向基神经网络模型预测穿刺误差;
7、结合第一鲁棒控制器和穿刺误差,构建第二鲁棒控制器;
8、设计干扰观测器,修正第二鲁棒控制器,得到第三鲁棒控制器用于活检机器人的控制。
9、进一步地,所述活检机器人简化为五个依次连接的活动关节,构建活检机器人动力模型如下:
10、
11、其中,t∈r是时间,q∈rn是位置向量,是速度向量,是加速度向量,表示不确定参数,集合∑表示未知σ的可能界,τ(t)∈rn是控制输入向量;此外m(q,σ,t)表示惯性矩阵,表示科里奥利/离心项矩阵,g(q,σ,t)表示重力,表示关节间的摩擦力,函数m(·)、v(·)、g(·)、f(·)是连续的。
12、进一步地,分解动力学模型,获取标称控制项和扰动控制项,具体如下:
13、
14、
15、
16、
17、
18、其中为标称部分,δm、δv、δg、δf为扰动项,τd穿刺外部扰动。
19、进一步地,构建活检机器人第一鲁棒控制器,具体如下:
20、
21、
22、
23、p=diag[kpi]5×5
24、d=diag[kvi]5×5
25、其中τ1为输出控制转矩,kpi、kvi为基于传统pid控制器的比例系数与微分系数,γ为一个大于0的恒定常数,∈>0为一个任意的设计参数。
26、进一步地,所述训练径向基神经网络模型,具体如下:
27、以试验穿刺时,活检机器人针尖传感器采集到的位置、速度和力反馈信息,输入输入层;
28、隐藏层通过高斯函数作为激活函数,对输入层的输出进一步处理;
29、输出层线性输出隐藏层神经元的输出,并输出结果。
30、进一步地,构建第二鲁棒控制器,具体如下:
31、
32、
33、进一步地,将穿刺误差ε视为混合扰动的一部分,设计穿刺误差的干扰观测器,具体如下:
34、
35、其中,z∈r2,是对误差ε的估计,非线性函数为增益矩阵。
36、进一步地,构建第三鲁棒控制器,具体如下:
37、
38、
39、由于采用了以上方案,本发明具有以下有益效果:
40、1、本发明采用新型鲁棒控制器控制,能有效避免由外界干扰、制造误差、建模误差、工作环境等原因带来的不确定性影响。
41、2、在本发明控制器的作用下,可使系统轨迹跟踪误差e(t)一致有界且最终一致有界,通过选取合适的∈,可使最终有界球的大小变得任意小。
42、3、本发明通过径向基神经网络逼近估计混合扰动边界,通过非线性扰动观测器观测并补偿神经网络误差,进一步提高了控制精度。
43、4、外部穿刺控制项会因穿刺物及被穿刺物的变化而变化,导致变量过多,采用径向基神经网络模型来预测可显著提高穿刺时的控制精准度。
技术特征:1.一种基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法,其特征在于,具体方法如下:
2.如权利要求1所述的基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法,其特征在于,所述活检机器人简化为五个依次连接的活动关节,构建活检机器人动力模型如下:
3.如权利要求2所述的基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法,其特征在于,分解动力学模型,获取标称控制项和扰动控制项,具体如下:
4.如权利要求3所述的基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法,其特征在于,构建活检机器人第一鲁棒控制器,具体如下:
5.如权利要求3所述的基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法,其特征在于,所述训练径向基神经网络模型,具体如下:
6.如权利要求3所述的基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法,其特征在于,构建第二鲁棒控制器,具体如下:
7.如权利要求3所述的基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法,其特征在于,将穿刺误差ε视为混合扰动的一部分,设计穿刺误差的干扰观测器,具体如下:
8.如权利要求3所述的基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法,其特征在于,构建第三鲁棒控制器,具体如下:
技术总结本发明涉及,特别涉及一种基于神经网络与非线性观测器的前列腺活检机器人鲁棒控制方法。将控制模型划分为标称控制项、扰动控制项、外部穿刺控制项,根据误差产生原因将控制误差划分为多个控制器,分别进行误差消除。其中外部穿刺控制项会因穿刺物及被穿刺物的变化而变化,导致变量过多,采用径向基神经网络模型来预测可显著提高穿刺时的控制精准度。本发明采用新型鲁棒控制器控制,能有效避免由外界干扰、制造误差、建模误差、工作环境等原因带来的不确定性影响。技术研发人员:张余龙,胡中华,王冬冬,管中良,陈现敏,沈培友受保护的技术使用者:合肥中科深谷科技发展有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/197880.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表