防静电腕带、防静电腕带的控制方法及存储介质与流程
- 国知局
- 2024-07-31 23:40:52
本技术涉及防静电,特别涉及一种防静电腕带、防静电腕带的控制方法及存储介质。
背景技术:
1、在厂区的电子车间中,静电不仅可能对设备造成损害,还可能对工作人员的健康产生影响,因此,智能防静电脚腕带现已大规模应用于各大电子产品制造厂。
2、然而,传统的防静电脚腕带通常是采用松紧带式设计,需要选择不同的尺寸进行固定,不够灵活。相关人员在进行佩戴时,脚腕带的紧固程度难以把控,在工作前需要进行多次调节。相关人员在工作时,由于工作时间过久,站立时间过长,且工作过程中通常会进行走动,因此脚腕带也会随着惯性而出现滑动,从而让使用者感到不适,且对防静电功能产生一定负面影响。
技术实现思路
1、本技术提供了一种防静电腕带、防静电腕带的控制方法及存储介质,能够解决防静电腕带容易松动、稳定性较差的问题。该技术方案如下:
2、本公开实施例的第一方面,提供了一种防静电腕带,所述防静电腕带内设置有气压传感器、微控制器、气囊和气泵;
3、所述气泵用于在开启状态下向所述气囊内部充气;
4、所述气压传感器用于监测所述气囊内的实时气压值,并向所述微控制器传输所述实时气压值;
5、所述微控制器用于基于所述实时气压值以及第一气压值控制所述气泵的开闭以及在开启状态下的充气速度,所述第一气压值是使所述防静电腕带与腕部贴合的气压值。
6、可选的,所述微控制器用于在所述实时气压值小于所述第一气压值的情况下控制所述气泵以第一充气速度充气,在所述实时气压值等于所述第一气压值的情况下控制所述气泵以第二充气速度充气,在所述实时气压值大于所述第一气压值的情况下控制所述气泵关闭并控制放气阀门开启;
7、其中,所述第一充气速度大于所述第二充气速度,在所述气泵开启阶段所述放气阀门处于关闭状态。
8、可选的,所述防静电腕带中还设置有加速度传感器;
9、所述加速度传感器用于监测腕部的加速度值,并向所述微控制器传输所述加速度值;
10、所述微控制器用于在所述加速度值未超过加速度阈值的情况下,基于所述实时气压值以及所述第一气压值控制所述气泵的开闭以及在开启状态下的充气速度;
11、所述微控制器还用于在所述加速度值超过所述加速度阈值的情况下,基于所述实时气压值以及第二气压值控制所述气泵的开闭以及在开启状态下的充气速度;
12、其中,所述第二气压值大于所述第一气压值。
13、可选的,所述微控制器用于在所述加速度值超过所述加速度阈值且所述实时气压值小于所述第二气压值的情况下,控制所述气泵以第三充气速度充气;
14、所述微控制器还用于在所述加速度值超过所述加速度阈值且所述实时气压值等于所述第二气压值的情况下,控制所述气泵以第四充气速度充气;
15、所述微控制器还用于在所述加速度值超过所述加速度阈值且所述实时气压值大于所述第二气压值的情况下,控制所述气泵关闭并控制所述放气阀门开启;
16、其中,所述第三充气速度大于所述第四充气速度。
17、可选的,所述防静电腕带中还设置有驱动器;
18、所述微控制器用于向所述驱动器发送气泵控制信号,所述气泵控制信号用于指示所述气泵的充气速度;
19、所述驱动器用于基于所述气泵控制信号驱动所述气泵充气。
20、本公开实施例的第二方面,提供了一种防静电腕带的控制方法,包括:
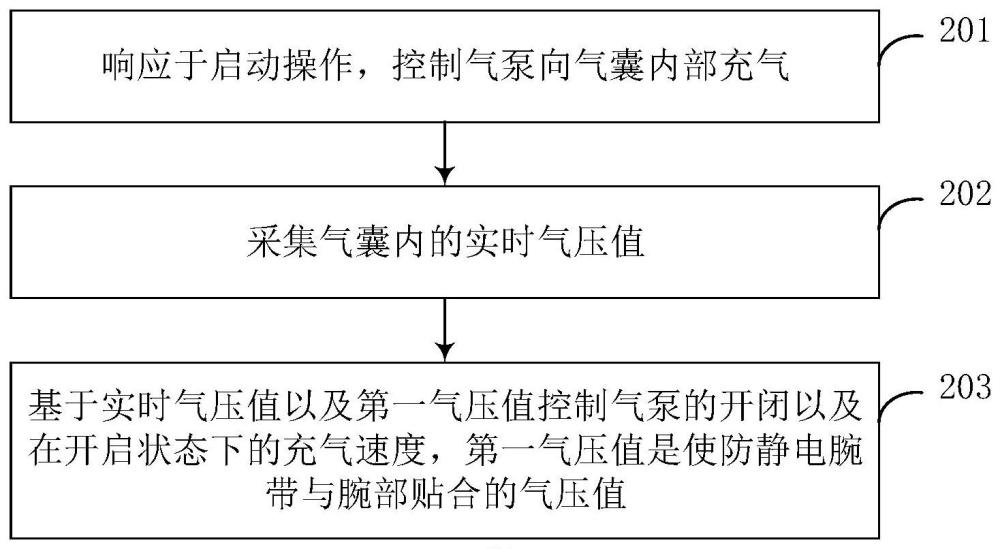
21、响应于启动操作,控制气泵向气囊内部充气;
22、采集所述气囊内的实时气压值;
23、基于所述实时气压值以及第一气压值控制所述气泵的开闭以及在开启状态下的充气速度,所述第一气压值是使所述防静电腕带与腕部贴合的气压值。
24、可选的,所述基于所述实时气压值以及第一气压值控制所述气泵的开闭以及在开启状态下的充气速度,包括:
25、在所述实时气压值小于所述第一气压值的情况下,控制所述气泵以第一充气速度充气;
26、在所述实时气压值等于所述第一气压值的情况下,控制所述气泵以第二充气速度充气;
27、在所述实时气压值大于所述第一气压值的情况下,控制所述气泵关闭并控制放气阀门开启;
28、其中,所述第一充气速度大于所述第二充气速度,在所述气泵开启阶段所述放气阀门处于关闭状态。
29、所述方法还包括:
30、监测腕部的加速度值;
31、在所述加速度值超过所述加速度阈值的情况下,基于所述实时气压值以及第二气压值控制所述气泵的开闭以及在开启状态下的充气速度;
32、所述基于所述实时气压值以及第一气压值控制所述气泵的开闭以及在开启状态下的充气速度,包括:
33、在所述加速度值未超过加速度阈值的情况下,基于所述实时气压值以及所述第一气压值控制所述气泵的开闭以及在开启状态下的充气速度;
34、其中,所述第二气压值大于所述第一气压值。
35、可选的,所述在所述加速度值超过所述加速度阈值的情况下,基于所述实时气压值以及第二气压值控制所述气泵的开闭以及在开启状态下的充气速度,包括:
36、在所述加速度值超过所述加速度阈值且所述实时气压值小于所述第二气压值的情况下,控制所述气泵以第三充气速度充气;
37、在所述加速度值超过所述加速度阈值且所述实时气压值等于所述第二气压值的情况下,控制所述气泵以第四充气速度充气;
38、在所述加速度值超过所述加速度阈值且所述实时气压值大于所述第二气压值的情况下,控制所述气泵关闭并控制所述放气阀门开启;
39、其中,所述第三充气速度大于所述第四充气速度。
40、本公开实施例的第三方面,提供了一种防静电腕带的控制装置,包括:
41、控制模块,用于响应于启动操作,控制气泵向气囊内部充气;
42、采集模块,用于采集所述气囊内的实时气压值;
43、所述控制模块,还用于基于所述实时气压值以及第一气压值控制所述气泵的开闭以及在开启状态下的充气速度,所述第一气压值是使所述防静电腕带与腕部贴合的气压值。
44、本公开实施例的第四方面,提供了一种电子设备,包括存储器、处理器以及存储在存储器中并且可以在处理器上运行的计算机程序,该处理器执行计算机程序时实现上述方法的步骤。
45、本公开实施例的第五方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述方法的步骤。
46、本公开实施例的第五方面,提供了一种计算机程序产品,该计算机程序产品包括计算机程序或指令,该计算机程序或指令被处理器执行时实现上述方法的步骤。
47、本技术提供的技术方案至少包括以下有益效果:
48、本技术提供的防静电腕带、防静电腕带的控制方法及存储介质,通过在充气式的防静电腕带内部安装气压传感器、微控制器、气囊和气泵,利用气泵向气囊内充气使腕带贴合腕部,同时实时监测气囊内的气压值并基于预设气压值调整气泵的充气速度和开闭,使气囊内部气压稳定在预设气压值附近,自主监测与控制腕带内的气压值,精准控制充放气,解决了腕带容易松动、稳定性较差的问题,提高作业的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198055.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。