一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法
- 国知局
- 2024-07-31 23:45:05
本发明涉及轨道交通,特别涉及一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法。
背景技术:
1、随着重载列车运行速度的提高、运输效率的增加以及群组列车运行控制技术的发展,轮轨黏着控制成为列车牵引制动与安全运行的关键因素。近年来,重载铁路在加长列车编组、提升轴重、列车智能运行控制等方面不断发展,由于轮轨黏着状态极易被恶劣的轨道状况和天气情况所影响,列车在牵引过程中容易发生车轮空转,在制动过程中会引起车轮打滑。为实现重载机车防滑防空转控制,保持黏着稳定性,目前主要有两个方法,一是优化轨面黏着条件,二是采用安全可靠的黏着控制策略。国内外针对重载机车黏着控制策略的研究主要有再黏着控制和优化黏着控制两个方向。再黏着控制是指轮对发生空转或滑行时,通过黏着控制系统控制牵引电机转矩调节牵引力,使得轮轨恢复到黏着工作状态,优化黏着控制是指列车始终运行在黏着特性曲线的稳定区,并且尽可能保持在最优黏着点附近。
2、在动力学与轮轨黏着控制的影响研究中,驱动系统影响着轮轨系统的振动特性,同时驱动系统带来的响应延迟和响应误差也会影响黏着控制效果,因此驱动系统准确建模是轮轨黏着控制的关键因素。
3、目前,尚无存在考虑驱动系统的重载列车动力学与轮轨防滑防空转黏着控制的联合仿真方案。
技术实现思路
1、本发明的目的在于提供一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法,能够准确考虑驱动系统对轮轨黏着控制的影响,并通过动力学与黏着控制实时联合仿真来完成黏着控制过程。
2、本发明解决其技术问题,采用的技术方案是:
3、一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法,包括如下步骤:
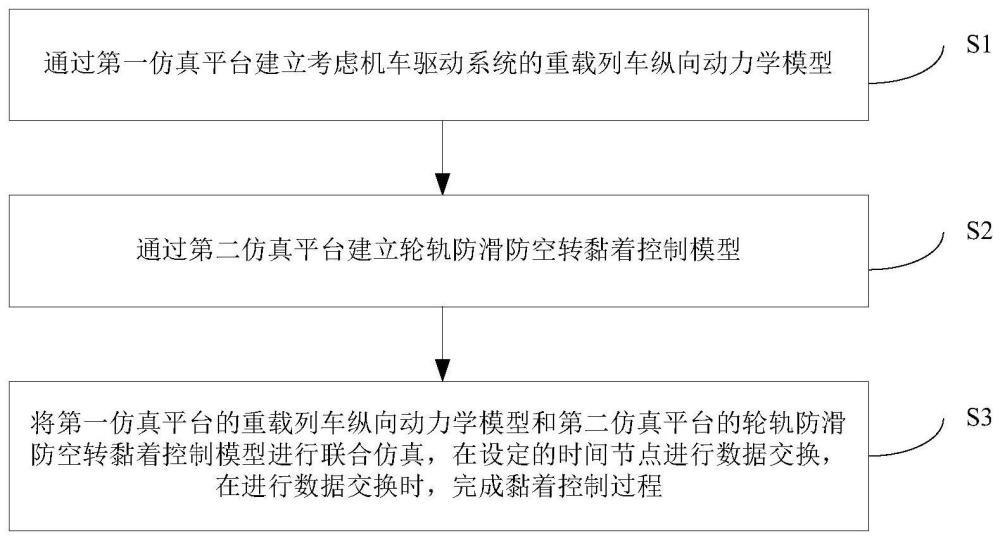
4、通过第一仿真平台建立考虑机车驱动系统的重载列车纵向动力学模型;
5、通过第二仿真平台建立轮轨防滑防空转黏着控制模型;
6、将第一仿真平台的重载列车纵向动力学模型和第二仿真平台的轮轨防滑防空转黏着控制模型进行联合仿真,在设定的时间节点进行数据交换,在进行数据交换时,完成黏着控制过程。
7、作为进一步优化,所述第一仿真平台为simpack仿真平台,所述第二仿真平台为matlab或simulink仿真平台;
8、通过仿真接口模块simat将第一仿真平台的重载列车纵向动力学模型和第二仿真平台的轮轨防滑防空转黏着控制模型进行联合仿真。
9、作为进一步优化,所述第一仿真平台中能够设定重载列车运行条件,当在第一仿真平台中设定好重载列车运行条件后,计算出重载列车纵向动力学参数,并通过仿真接口模块simat传输至第二仿真平台,所述计算出的重载列车纵向动力学参数,至少包括速度信号、轮对角加速度信号和时间信号。
10、作为进一步优化,当所述轮轨防滑防空转黏着控制模型建立完毕后,将轮对纵向蠕滑率和轮对角加速度作为判据,并分别设定轮对蠕滑率的第一阈值和第二阈值,以及轮对角加速度的第一阈值和第二阈值。
11、作为进一步优化,当第二仿真平台接收到重载列车纵向动力学参数后,计算出轮对纵向蠕滑率信号,并根据设定好的判据阈值判断重载列车的轮对在轨面的运行情况,当轮对在轨面发生空转或滑行情况时,对重载列车的电机转矩进行实时调整,并将调整后的电机转矩传输至第一仿真平台的重载列车纵向动力学模型中。
12、作为进一步优化,所述当轮对在轨面发生空转或滑行情况时,对重载列车的电机转矩进行实时调整,包括如下步骤:
13、司控手柄给定一个初始转矩,首先对轮对角加速度及蠕滑率同时进行判断,如果轮对角加速度和蠕滑率均小于给定第一阈值时,则判定为正常运行,重载列车以初始转矩运行;
14、当轮对加速度或蠕滑率超过给定第一阈值,则判定为空转或打滑失控状态,并进入降转矩阶段,此时,先将初始转矩在1.0s内以2.0*初始转矩的斜率下降,且保证电机转矩≥0.36*初始转矩,转矩在下降的过程中,实时多次进行轮对角加速度或蠕滑率判据的判定,直至轮对角加速度和蠕滑率同时小于给定第一阈值;
15、当轮对角加速度和蠕滑率均小于给定第一阈值时,则进入转矩保持阶段,在1.0s以上时刻减小后的电机转矩保持牵引运行,转矩在下降的过程中,实时多次进行轮对角加速度或蠕滑率判据的判定,如果轮对角加速度或蠕滑率超过给定第一阈值,则返回至降转矩阶段;
16、如果轮对角加速度和蠕滑率均小于给定第一阈值时,则进入转矩恢复阶段,此时,采用第二阈值判定,如果轮对角加速度和蠕滑率均小于给定第二阈值时,初始转矩在1.0s内以1.0*初始转矩的斜率上升,且保证电机转矩≤初始转矩,转矩在恢复过程中,实时多次进行轮对角加速度或蠕滑率判据的判定,如果轮对角加速度或蠕滑率超过给定第二阈值,则返回至降转矩阶段;
17、当采用第二阈值判定时的轮对角加速度和蠕滑率均小于第二阈值时,电机转矩已恢复到初始转矩,至此,完成黏着控制过程。
18、本发明的有益效果是:通过上述一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法,首先,通过第一仿真平台建立考虑机车驱动系统的重载列车纵向动力学模型,其次,通过第二仿真平台建立轮轨防滑防空转黏着控制模型,然后,将第一仿真平台的重载列车纵向动力学模型和第二仿真平台的轮轨防滑防空转黏着控制模型进行联合仿真,在设定的时间节点进行数据交换,在进行数据交换时,完成黏着控制过程。
19、因此,本发明能够对轮轨空转打滑现象进行有效控制,并且,由于考虑了驱动系统对轮轨防滑防空转黏着控制的影响,因此,黏着控制效果更加显著,同时可以适应不同的轨面状态及不同等级的列车运行速度工况。
技术特征:1.一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法,其特征在于,所述第一仿真平台为simpack仿真平台,所述第二仿真平台为matlab或simulink仿真平台;
3.根据权利要求1所述的一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法,其特征在于,所述第一仿真平台中能够设定重载列车运行条件,当在第一仿真平台中设定好重载列车运行条件后,计算出重载列车纵向动力学参数,并通过仿真接口模块simat传输至第二仿真平台,所述计算出的重载列车纵向动力学参数,至少包括速度信号、轮对角加速度信号和时间信号。
4.根据权利要求3所述的一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法,其特征在于,当所述轮轨防滑防空转黏着控制模型建立完毕后,将轮对纵向蠕滑率和轮对角加速度作为判据,并分别设定轮对蠕滑率的第一阈值和第二阈值,以及轮对角加速度的第一阈值和第二阈值。
5.根据权利要求4所述的一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法,其特征在于,当第二仿真平台接收到重载列车纵向动力学参数后,计算出轮对纵向蠕滑率信号,并根据设定好的判据阈值判断重载列车的轮对在轨面的运行情况,当轮对在轨面发生空转或滑行情况时,对重载列车的电机转矩进行实时调整,并将调整后的电机转矩传输至第一仿真平台的重载列车纵向动力学模型中。
6.根据权利要求5所述的一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法,其特征在于,所述当轮对在轨面发生空转或滑行情况时,对重载列车的电机转矩进行实时调整,包括如下步骤:
技术总结本发明属于轨道交通技术领域,提出了一种考虑驱动系统的轮轨防滑防空转黏着控制仿真方法,包括如下步骤:首先,通过第一仿真平台建立考虑机车驱动系统的重载列车纵向动力学模型;其次,通过第二仿真平台建立轮轨防滑防空转黏着控制模型;然后,将第一仿真平台的重载列车纵向动力学模型和第二仿真平台的轮轨防滑防空转黏着控制模型进行联合仿真,在设定的时间节点进行数据交换,在进行数据交换时,完成黏着控制过程。本发明能够准确考虑驱动系统对轮轨黏着控制的影响,并通过动力学与黏着控制实时联合仿真来完成黏着控制过程。技术研发人员:陈再刚,单俊强,刘可新,宋宗莹,周子伟,王文斌,朱胜阳,王兴中受保护的技术使用者:西南交通大学技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198420.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表