一种同步顶升系统及其控制方法与流程
- 国知局
- 2024-07-31 23:47:55
本发明涉及顶升系统控制,尤其涉及一种同步顶升系统及其控制方法。
背景技术:
1、当前市场上关于造楼机、建筑物无损顶升或搬迁等作业几乎均采用了系统集成手段实现的,其技术含量低,关联设备间工作协调性差、监控及其反馈判断不全面导致的作业险情大。基于上述缺陷,本发明提出一种同步顶升系统及其控制方法,采用本发明实现最高为64个同步顶升节点、以严格执行约束协调功能的后端约束协调子系统为桥梁,构建系统间的互连控制,实现智能造楼机(或其它大型重载物体)的全程闭环自动控制。
技术实现思路
1、为解决背景技术中存在的技术问题,本发明提出一种同步顶升系统及其控制方法。
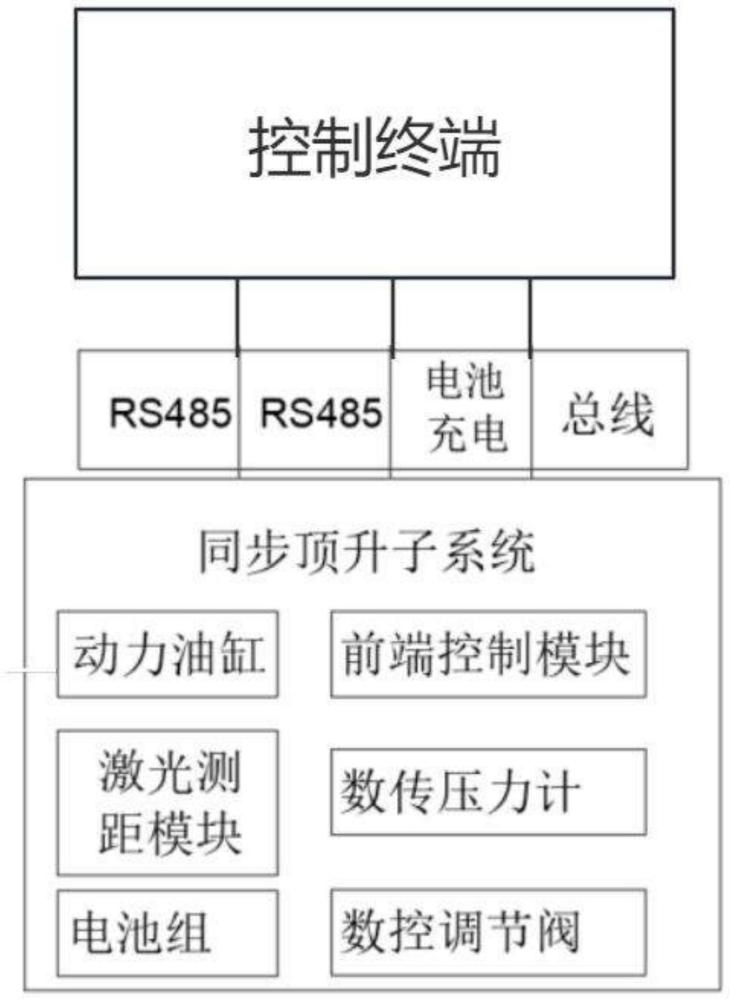
2、本发明提出的一种同步顶升系统,系统包括多个节点,各节点包括前端控制模块、安装在千斤顶的输入管路和输出管路上的多个数控调节阀、数传压力计、电池组、激光测距模块、包括液压油输入管路、液压油输出管路以及用于步进顶升输出的千斤顶的千斤顶和包括一支6芯电缆的总线;
3、所述前端控制模块用于控制某顶升节点的预顶升、顶升、回落等作业操作、采集与处理顶升过程中的运行信息并通过总线向控制终端发送顶升操作中的各种信息,这些信息包括激光测距模块测量的千斤顶活塞伸缩的位移信息、电池组的电气信息、数传压力计检测千斤顶油压的压力、以及数控调节阀的开闭状态信息;
4、所述数控调节阀用于控制千斤顶输入油压及泄压;
5、所述电池组用于提供电源;
6、所述激光测距模块用于采集并发送千斤顶活塞的位移信息;
7、所述总线用于系统间的通信;所述总线的6芯电缆分配为:4线分配给2组rs485,2线分配给48伏直流稳压电源;其中:一组rs485芯线用以点名模式数据交互,另一组rs485芯线用以广播模式信息交互,用于同步启动系统各节点的顶升、同步回落操作。
8、本发明提出的一种同步顶升系统的控制方法,如下步骤:
9、s1:控制终端以广播模式唤醒处于常闭状态的各节点;
10、s2:各节点进行初始化和自检并发送初始化及自检信息至控制终端,经控制终端判断各顶升节点降低自检及初始化均正常后,以广播模式向各节点发出预顶升指令,
11、s3:各节点同时执行预顶升操作直至达到预设条件;
12、s4:经控制终端判断各顶升节点执行预顶升操作反馈的信息均处于正常范围后,控制终端以点名模式采样和检测各节点预顶升操作信息;
13、s5:控制终端以广播模式向各节点发出第一个位移步长的顶升操作控制指令;
14、s6:各节点执行第一个位移步长的顶升操作,并将与自身相关的的物理量变化参数通过点名通信模式与控制终端交互,控制终端判断各顶升节点执行第一个步长顶升均处于正常范围后,发出下一个位移步长的顶升操作控制指令;
15、s7:重复s6-s7直至完成设定的顶升位移量,各节点执行同步回落操作。
16、优选的,s2中所述自检内容包括节点供电电气状态、现场环境温度、数控调节阀及数传压力计状态、激光测距信息。
17、优选的,s3中所述的预顶升操作中,当检测到顶升千斤顶活塞与被顶升构件接触,构件上设置的应变传感器发生跳变时,或是检测到前后两次的激光测距位移发生变化时,锁定千斤顶并立即停止操作。
18、优选的,s4中所述控制终端检测在步长顶升操作时,若其执行结果不符合设定的参数范围,则控制终端判断发生故障,不再发出下个步长的顶升操作指令,并发出故障信息,并锁定当前各顶升节点的状态(控制电控调节阀保持当前油压):
19、向计算机终端发送相关信息,向动力柜控制系统发出保持油压信息,封锁动力柜回油接口处的开闭式数控调节阀,锁定顶升系统油路的油压。
20、优选的,所述故障信息包括不符合设定参数运行的系统编号、出错类型。
21、优选的,s6中所述与自身相关的的物理量变化参数包括开销时间、顶升距离、现场环境温度、油压、数控阀状态。
22、优选的,所述各节点根据预顶升操作后的数控调节阀输出的电流环状态和激光测距信息进行顶升操作或回落操作的闭环反馈控制:
23、假定每次实际顶升为24厘米,越界8厘米,最高顶升32厘米。将最高顶升32厘米分成32个小步长单位,每个顶升步长位移为1厘米;假定32个顶升步长设定总开销时间为320秒(略去顶升节点于终端控制器间信息交互开销的时间),设定回落挂揳总耗时80秒;因此,每个顶升步长运行位移为1厘米,设定运行时间为10秒,即:各顶升节点在10秒内完成10毫米的顶升位移,因此单位时间位移速率c=1(毫米/秒)。
24、假定某顶升节点数控调节阀完成预顶升操作后其阀芯开闭角度值为d0,对应输入的电流环信号为i,相邻二次的激光测距位移变化值为δl0,相邻二次激光测距时间间隔为在δt秒时间内,该顶升节点的实际位移的速率v0为:
25、
26、比较v0和c
27、λ=v0/c
28、若λ大于1,则在下个顶升步长操作时递减数控调节阀的输入控制电流i以降低位移顶升速率,若c1小于1则递增数控调节阀的输入控制电流i以提升位移顶升速率,由此实行自适应同步顶升控制。
29、所述顶升操作具体如下:
30、s6.1:读取当前激光测距模块测量值,对应的数传压力计的压力值;
31、s6.2:启动控制数控调节阀;
32、s6.3:启动激光测距模块,根据上述闭环反馈控制进行数控调节阀的控制;
33、本发明所提出的一种同步顶升系统及方法,具有以下有益效果:
34、本发明:
35、1.能够提供系统所需的各种供电需要;
36、2.能够为各节点配置的电池组实现点名式充电补充;
37、3.能够基于采集的信息进行预顶升、顶升、回落挂揳的闭环反馈控制,根据操作实际情况进行自适应调节;
38、4.还能够实现双路rs485长距离数据传输。
技术特征:1.一种自适应同步顶升控制系统,其特征在于在多节点同步顶升作业中将一次需要顶升的位移量细分为n个步长顶升操作,降低因个别顶升节点发生故障时各顶升节点间产生的顶升位移差,从而大大降低了作业风险。
2.一种自适应同步顶升控制系统,其特征在于,系统包括多个顶升节点,各顶升节点包括前端控制模块、安装在千斤顶的油压输入管路上的数控调节阀、数传压力计、电池组、激光测距模块、包括液压油输入管路、以及用于步进顶升动力输出的千斤顶和包括一支6芯电缆的总线;
3.一种如权利要求1所述的自适应同步顶升控制系统的控制方法,其特征在于,包括如下步骤:
4.根据权利要求2所述的自适应同步顶升控制系统的控制方法,其特征在于,s2中所述自检内容包括节点供电电气状态、现场环境温度、数控调节阀及数传压力计状态、激光测距信息。
5.根据权利要求3所述的自适应同步顶升控制系统的控制方法,其特征在于,s3中所述预顶升操作中,当检测到顶升千斤顶活塞与被顶升构件接触,构件上设置的应变传感器发生跳变时,或是检测到前后两次的激光测距位移发生变化时,锁定千斤顶并立即停止操作。
6.根据权利要求2所述的自适应同步顶升控制系统的控制方法,其特征在于,s4中所述控制终端在检测步长顶升操作时,若其执行结果不符合设定的参数范围,则控制终端判断发生故障,不再发出下个步长的顶升操作指令,发出故障信息,并执行相应的回落操作:
7.根据权利要求5所述的自适应同步顶升控制系统的控制方法,其特征在于,所述故障信息包括不符合设定参数运行的系统编号、出错类型。
8.根据权利要求2所述的自适应同步顶升控制系统的控制方法,其特征在于,s6中所述与自身相关的的物理量变化参数包括开销时间、顶升距离、现场环境温度、油压、数控阀状态。
9.根据权利要求7所述的自适应同步顶升控制系统的控制方法,其特征在于,所述各节点根据预顶升操作后的数控调节阀输出的电流环状态和激光测距信息进行顶升操作或回落操作的闭环反馈控制:
技术总结本发明公开了一种自适应同步顶升控制系统及其控制方法,包括:本发明系统包括多个节点,各节点包括前端控制模块、安装在千斤顶的输入管路和输出管路上的多个数控调节阀、数传压力计、电池组、激光测距模块、包括液压油输入管路、液压油输出管路以及用于步进顶升输出的千斤顶的千斤顶和包括一支6芯电缆的总线。本发明通过提供6芯电缆线满足各种供电需求,还通过RS485通信链路实现系统间的通信,通过闭环反馈控制实现系统内位移步长变速率的自适应调节,能够实现系统间的开放式信息交互及管理、且其安全性较高,使用寿命较长,能够大幅减少施工过程中人工干预。技术研发人员:李建国,陈前广,曾柳煊受保护的技术使用者:上海巢势建筑科技有限公司技术研发日:技术公布日:2024/6/20本文地址:https://www.jishuxx.com/zhuanli/20240730/198565.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表