考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法
- 国知局
- 2024-07-31 23:52:37
本发明涉及一种考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,属于飞行器控制。
背景技术:
1、在大跨域、大攻角、高机动的飞行环境下,飞行器受到非线性气动力、惯性力和舵面效应等多种因素的影响,导致滚转通道的稳定性受到严重影响。
2、传统的旋转飞行器横滚转控制方法中,设置滚转通道模型时往往忽略了执行机构动力学的影响,而将其简化为线性模型或不考虑其动态特性。这种简化会导致控制系统设计与实际执行机构的行为存在差异,从而影响了控制系统的性能和稳定性,具体地:
3、首先,执行机构的响应速度和惯性特性对滚转通道的动态响应和稳定性有着重要影响,忽略这些影响可能导致控制系统响应滞后、稳定性下降以及控制精度降低。
4、其次,在大攻角非线性飞行环境下,飞行器的姿态动力学具有复杂的非线性特性,传统的线性控制方法往往无法满足控制要求。
5、因此,有必要对现有的旋转飞行器横滚转控制方法进行深入研究,以解决上述问题。
技术实现思路
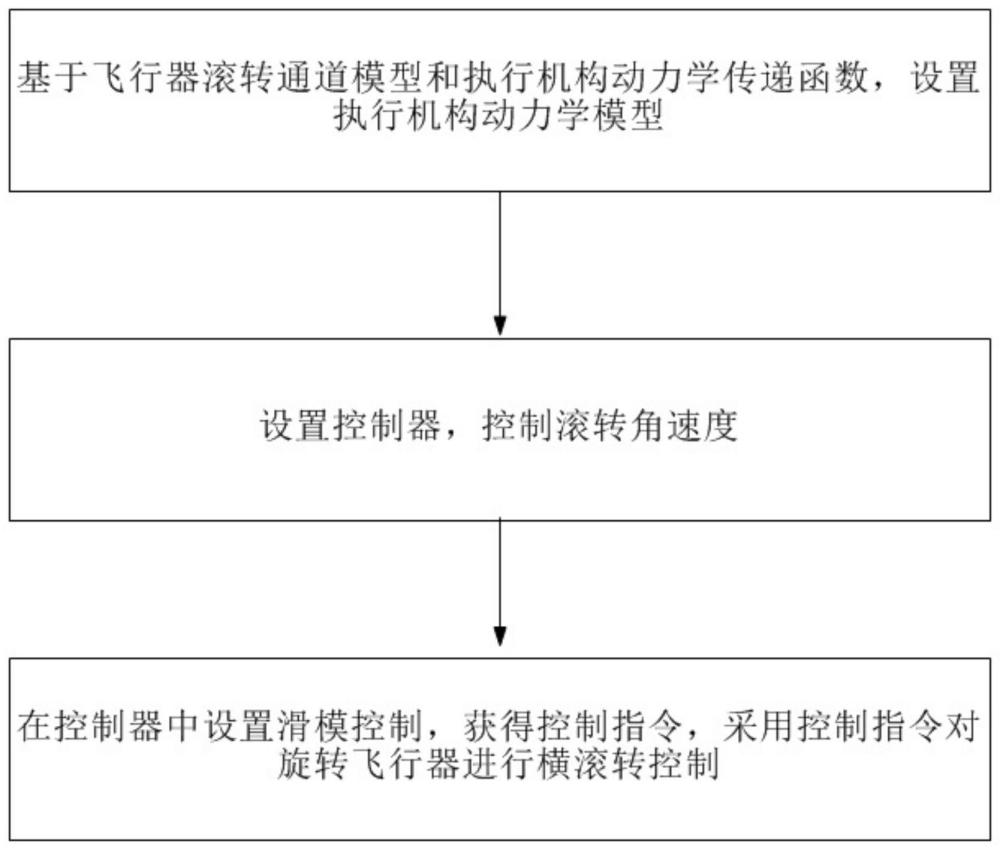
1、为了克服上述问题,本发明人进行了深入研究,提出了一种考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,包括以下步骤:
2、基于飞行器滚转通道模型和执行机构动力学传递函数,设置执行机构动力学模型;
3、设置控制器,控制滚转角速度;
4、在控制器中设置滑模控制,获得偏转控制指令,采用偏转控制指令对旋转飞行器进行横滚转控制。
5、在一个优选的实施方式中,所述滚转通道模型设置为:
6、
7、
8、其中,x1=φ表示飞行器的滚转角,表示飞行器的滚转角速度,x1、x2为模型的系统变量,为x1的导数,为x2的导数,clα表示扰动系数,kd表示舵偏角系数,ωrr表示滚转角速度带宽,u表示执行机构的偏转控制指令。
9、在一个优选的实施方式中,所述执行机构动力学传递函数表示为:
10、
11、其中,s表示传递参数,δa表示实际舵面偏转,δc表示执行机构的偏转指令,ζa表示执行机构的阻尼比,ωa表示振荡频率在一个优选的实施方式中,所述执行机构动力学模型表示为:
12、
13、
14、
15、
16、其中,x1=φ表示飞行器的滚转角,表示飞行器的滚转角速度,x3=δa表示飞行器的实际舵面偏转,表示飞行器的舵面偏转速率,x1、x2、x3、x4为模型的系统变量,δc=u表示执行机构的偏转控制指令。
17、在一个优选的实施方式中,所述控制器设置为:
18、ψ(x)=fx-ρ(x1)btpx
19、其中,x表示控制器的状态变量,x=[x1,x2],ψ(x)表示舵面偏转的期望值,ψ(x)=u,f为增益矩阵,ρ(x1)为x1的非线性函数,b、p为参数矩阵。
20、在一个优选的实施方式中,设置滑模控制的误差函数为实际舵面偏转与期望舵面偏转之间的误差。
21、在一个优选的实施方式中,滑模控制的滑模面s设置为:
22、s滑=ce1+e2
23、
24、其中,c为可设定参数,e1为误差函数。
25、在一个优选的实施方式中,设置滑模趋近律为:
26、
27、其中,α1、α2、k、p、q为可设定参数。
28、在一个优选的实施方式中,获得的偏转控制指令表示为:
29、
30、本发明所具有的有益效果包括:
31、(1)提高飞行器在大攻角非线性飞行环境下的横滚稳定性、控制精度和动态响应能力,从而确保飞行器的安全性、稳定性和性能;
32、(2)具有高全局鲁棒指数稳定性。
技术特征:1.一种考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,其特征在于,
3.根据权利要求2所述的考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,其特征在于,
4.根据权利要求3所述的考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,其特征在于,
5.根据权利要求1所述的考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,其特征在于,
6.根据权利要求1所述的考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,其特征在于,
7.根据权利要求1所述的考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,其特征在于,
8.根据权利要求7所述的考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,其特征在于,
9.根据权利要求1所述的考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,其特征在于,
技术总结本发明公开了一种考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,包括以下步骤:基于飞行器滚转通道模型和执行机构动力学传递函数,设置执行机构动力学模型;设置控制器,控制滚转角速度;在控制器中设置滑模控制,获得控制指令,采用控制指令对旋转飞行器进行横滚转控制。本发明公开的考虑执行机构动力学的旋转飞行器的横滚转稳定控制方法,提高飞行器在大攻角非线性飞行环境下的横滚稳定性、控制精度和动态响应能力,从而确保飞行器的安全性、稳定性和性能。技术研发人员:王伟,杨婧,林时尧,王少龙,王宏,朱泽军,张宏岩,李俊辉,于之晨,李成洋受保护的技术使用者:北京理工大学技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240730/198938.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。