高速飞行器的强鲁棒智能复合姿态控制设计方法
- 国知局
- 2024-07-31 23:52:56
本发明属于航空航天,涉及一种飞行器控制方法,具体涉及一种高速飞行器的强鲁棒智能复合姿态控制设计方法。
背景技术:
1、高速飞行器是一个具有快时变、强耦合以及大不确定性的受控对象,这些特性使得高速飞行器的控制系统设计面临极大的挑战。滑模控制、反步控制、动态逆等经典的非线性控制方法常被用于飞行器的控制系统设计中,但这些方法对数学模型依赖程度较高,在数学模型精确程度较低的情况下,控制效果会大打折扣,控制系统的鲁棒性和稳定性难以得到保障。为提高模型精度,最小二乘法、滤波器重构以及卡尔曼滤波等一系列的在线参数辨识方法被广泛应用于非线性控制中,但这些算法难以快速有效地辨识高速飞行器的快时变参数,甚至有可能在激励不充分的情况下,由于辨识误差过大而导致无法为飞行器控制系统提供有效支撑。
技术实现思路
1、为了克服现有高速飞行器的经典非线性控制方法对飞行器数学模型依赖程度较高的缺点,提供一种能快速辨识时变气动参数的弱模型依赖强鲁棒智能复合姿态控制设计方法,使飞行器可以在大参数拉偏和大范围机动的情况下跟踪姿态指令信号,并保证系统具有良好的快速性和很高的稳态精度。
2、为了实现上述目的,本发明采取以下技术方案:
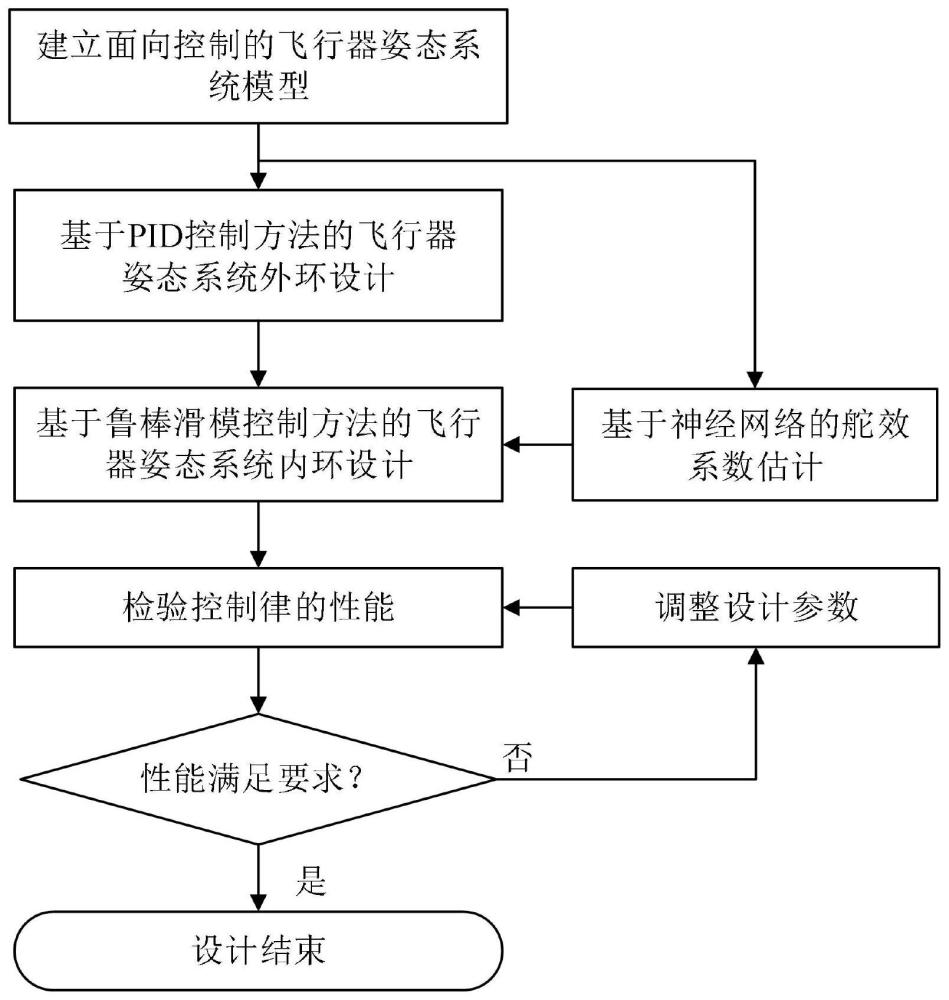
3、一种高速飞行器的强鲁棒智能复合姿态控制设计方法,包括以下步骤:
4、步骤一、建立高速飞行器面向控制的姿态系统模型;
5、步骤二、设计基于神经网络参数辨识的强鲁棒智能复合姿态控制算法;
6、步骤三、仿真检验高速飞行器的强鲁棒智能复合姿态控制算法的性能。
7、进一步的,步骤一中,飞行器姿态系统的非线性模型状态变量包括滚转角γ,攻角α,侧滑角β,滚转角速度ωx,偏航角速度ωy和俯仰角速度ωz,在建立模型时,视高速飞行器为理想刚体,且认为飞行器对体坐标系各轴的惯量积为零;
8、因为外环设计采用无需模型参数的pid控制方法,所以在建立飞行器动力学模型时仅需建立内环方程,在体坐标系下描述飞行器绕质心转动的动力学方程如下:
9、
10、式中,t表示时间;mx,my和mz分别为飞行器所受气动力矩在体坐标系各轴上的分量;jx,jy和jz分别为飞行器对于体坐标系各轴的转动惯量;
11、气动力矩在体坐标系各轴上的分量,即滚转力矩mx、偏航力矩my和俯仰力矩mz表示为如下形式:
12、
13、式中,q为动压,q=0.5ρv2,其中ρ为飞行器质心所在处的大气密度;s为飞行器的特征面积;v为飞行器速度;b为飞行器侧向参考长度,c为飞行器纵向参考长度;δx为滚转通道舵偏角,δy为偏航通道舵偏角,δz为俯仰通道舵偏角;表示mj对i的偏导数,i=α,β,δj,j=x,y,z,mx,my和mz分别为滚转力矩系数、偏航力矩系数和俯仰力矩系数;
14、由此,面向控制的高速飞行器内环非线性模型如下所述:
15、
16、其中,fj,gj为非精确已知的非线性函数,fj0,gj0分别为fj,gj的名义值,δfj表示加性不确定性,δgj表示乘性不确定性,并假设
17、
18、其中,表示偏导数的名义值,jj0表示转动惯量jj的名义值,q0为动压q的名义值,s0为飞行器的特征面积s的名义值,b0为飞行器侧向参考长度b的名义值,c0为飞行器纵向参考长度c的名义值,i=α,β,δj,j=x,y,z;并假设
19、
20、其中,δfj和δgj为两个正常数,j=x,y,z。
21、进一步的,所述步骤二包括以下具体步骤:
22、s1:基于pid控制方法的飞行器姿态系统外环设计:
23、利用pid控制理论,进行姿态系统外环设计,输入为姿态指令信号,输出为角速度指令信号;
24、定义姿态角跟踪误差
25、
26、其中,γc,βc,αc分别为滚转角、侧滑角和攻角的指令信号;ex,ey,ez分别为滚转角、侧滑角和攻角的跟踪误差;
27、利用如下微分器分别求取三个姿态角跟踪误差的导数
28、
29、其中,ξj1和ξj2是微分器的状态变量,是的估计值,设计参数满足:rj1>0,rj2>0,j=x,y,z;
30、构造姿态角速度指令信号为:
31、
32、其中,ωjc为姿态角速度指令信号,设计参数满足:kpj>0,kij>0,kdj>0,j=x,y,z
33、s2:基于鲁棒滑模控制方法的飞行器姿态系统内环设计:
34、利用鲁棒滑模控制理论,进行姿态系统内环设计,输入为姿态角速度指令信号,输出为舵偏角信号;
35、为了方便后续控制器设计,将内环姿态系统抽象为更具普遍意义的系统,其形式如下:
36、
37、其中,x为状态变量,u为控制输入,f(x),g(x)为非精确已知的非线性函数,其表达式为
38、
39、其中,f0(x)和g0(x)分别表示f(x)和g(x)的名义值,δf表示加性不确定性,δg表示乘性不确定性,且满足
40、
41、其中,δf和δg为两个正常数;
42、定义滑模变量为
43、s=x-xc (11)
44、其中xc为指令信号,可得
45、
46、将式(9)代入式(12)中,得到
47、
48、设计控制输入
49、
50、其中
51、
52、
53、上式中,k1>0,k2>0,ε>0为待设计的参数;容易证明,上述控制律可以保证飞行器姿态系统的跟踪误差要么始终位于集合之内,要么有限时间收敛并保持在集合之内;对于一个给定的跟踪误差指标|e0|>0,可通过合理选取参数k1和ε来保证从而使系统跟踪误差可以满足任意给定的跟踪指标;
54、依照上述设计方法,得到如下的三通道内环控制器:
55、1)滚转通道控制算法:
56、
57、2)偏航通道控制算法:
58、
59、3)俯仰通道控制算法:
60、
61、其中,sj为滑模变量,δfj表示加性不确定性δfj的绝对值的上界,δgj表示乘性不确定性δgj的绝对值的上界,设计参数满足:kj1>0,kj2>0,ε>0,j=x,y,z;
62、s3:基于神经网络的飞行器舵效系数估计
63、考虑到内环控制算法(17)-(19)的性能严重依赖于快时变舵效参数为降低不确定性的影响,本发明采用神经网络对该参数进行实时辨识:
64、首先,设计合理的神经网络结构,映射相关变量与力矩系数mx,my,mz之间的非线性关系,该神经网络由单层隐藏神经元和线性输出神经元两层前馈bp网络构成,以马赫数ma、攻角α和三个物理舵偏角δr,δe,δa为输入,以力矩系数mx,my,mz为输出,以sigmoid函数为激活函数;
65、其次,对所设计神经网络进行离线训练;该神经网络采用梯度下降法调整各层间的权值,同时应用贝叶斯正则化算法修正训练函数;正则化之后的bp神经网络的训练性能函数为:
66、f=αbeω+βbed (20)
67、
68、
69、其中,ed为网络响应的均方差;n为总样本数;第ib组样本的目标输出;为第ib组样本的实际输出;eω为全部网络权值的平均数;m为权值总个数;为神经网络的权值;αb,βb为正则化系数,当αb<βb时,训练更倾向于减少样本误差;当αb>βb时训练更倾向于平滑网络输出,αb和βb的值差距过大往往会出现过拟合和欠拟合的问题,因此,为避免该问题发生,αb和βb的值采用贝叶斯算法自适应修正:
70、
71、其中,γb=n-2αb·tr(h-1)为有效参数的数量,tr(·)表示矩阵·的迹,为性能函数的海森矩阵;
72、最后,利用训练完成的神经网路进行舵效系数的实时获取,定义训练完成后的神经网络函数为:
73、
74、其中,为神经网络的输出,分别表示mx,my,mz的估计值,α,ma,δr,δe,δa分别为攻角、马赫数、方向舵偏角、左升降舵偏角和右升降舵偏角,并定义数学意义上的滚转通道舵偏角、偏航通道舵偏角和俯仰通道舵偏角分别为
75、
76、依据式(24)和(25)描述的非线性关系,利用差分法获得舵效系数并实时代入到滑模控制器中,
77、综合前述,便得到高速飞行器的强鲁棒智能复合姿态控制设计方法,最终算法如下所示:
78、1)滚转通道控制算法:
79、
80、2)偏航通道控制算法:
81、
82、3)俯仰通道控制算法:
83、
84、其中,舵效系数由神经网络给出,设计参数满足:kpj>0,kij>0,kdj>0,kj1>0,kj2>0,rj1>0,rj2>0,j=x,y,z,ε>0。
85、进一步的,所述s3中单层隐藏神经元中神经元的个数为50个。
86、进一步的,所述步骤三中,为了检验所设计的强鲁棒智能复合姿态控制算法的性能,将其应用于高速飞行器六自由度的非线性姿态控制系统中,借助常用的计算机数值计算和仿真软件来进行,在允许的范围内选择好设计参数后,进行仿真计算并进行性能检验。如果强鲁棒智能复合姿态控制算法的性能满足要求,则设计结束;否则,需要调整设计参数,重新进行仿真计算并进行性能检验。
87、与现有技术相比,本发明的有益效果是:
88、本发明的方法降低了飞行器控制系统对于精确数学模型的依赖程度,简单且易于实现。采用双环控制策略,外环设计采用pid控制算法,其微分项由滑模微分器给出,消除了对于模型的依赖;内环采用基于神经网络的鲁棒滑模算法,充分利用可用数据对关键气动参数进行神经网络辨识,有效降低了对于模型的依赖程度。
89、本发明的方法可以保证飞行器闭环姿态系统具有很强的鲁棒性。外环的pid算法不依赖任何模型信息,能很好的应对建模不精确导致的不确定性问题;内环的基于神经网络的滑模控制算法也具有很强的鲁棒性,一方面滑模算法本身具有很强的鲁棒性,另一方面,引入基于神经网络的参数辨识方法,实时获得舵效系数,有效克服了不确定性的影响。
90、本发明的方法综合了滑模和pid控制算法的优势,可以保证系统具有良好的快速性和很高的稳态精度。本发明将动态性能好的滑模控制算法应用到变化速度更快的内环,使跟踪误差有限时间内收敛到零附近,提高了系统的动态性能;将稳态性能好的pid算法应用到精度要求更高的外环,利用积分项不断地提高控制增益来处理稳态误差,提高了控制系统的稳态性能。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198970.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表