一种模拟通信传输过程的高速平台半实物仿真系统及方法
- 国知局
- 2024-07-31 23:42:44
本发明涉及高速平台系统半实物仿真,具体涉及一种模拟通信传输过程的高速平台半实物仿真系统及方法。
背景技术:
1、云爆子母弹是一种由高空投放燃料空气弹药,其由母弹携带3~4枚子弹在到达目标上空后抛射子弹,子弹根据弹上的传感器信息完成云爆剂的抛撒和云爆剂的引燃,实现对地面目标的综合毁伤。云爆子母弹的投放平台不同其下落的速度状态也有所不同,由于母弹抛射子弹的不确定性,使得各子弹在目标上空的状态难以事先预测,因此在云爆子弹中常会采用控制组件根据实际情况调整开伞减速、云爆剂的抛洒和云爆剂的引燃等动作的时机。这些控制组件中多会使用协同控制算法进行各种动作的控制,协同控制算法的形成需要建立在理论研究和物理建模的基础上。这些理论和模型能够在一定程度上模拟使用环境,但与实际情况仍有较大的出入。因此每枚云爆子弹在投入使用前需要进行多次的投放试验以验证协同控制算法的可靠性和有效性,然而每次弹药的投放试验成本十分高昂,时间周期较长,难以快速定位算法设计研制中存在的具体问题,为此需要一种模拟通信传输过程的高速平台半实物仿真方法,仿真评估不同条件下协同控制算法在使用过程中的性能。
2、现有的云爆弹的性能评估方法主要关注作战末端对目标的毁伤效果,如专利cn116364272b主要采用了asii综合评估方法实现了云爆弹末端对人员的多参数毁伤效果评估。现有方法缺少了对高速平台下云爆子母弹整体作用过程的仿真,不能模拟高速运动状态下云爆子弹快速变化的状态对整体系统的影响,无法形成作用过程动作与末端对目标毁伤的关联,从而无法验证协同控制算法在不同实际状况下的性能效果。
3、因此需要一种模拟通信传输过程的高速平台半实物仿真方法来仿真测试其不同初始与系统误差条件下的协同控制算法性能。
技术实现思路
1、有鉴于此,本发明提供了一种模拟通信传输过程的高速平台半实物仿真系统及方法,能够仿真测试不同抛撒条件下协同控制算法输出的动作结果,能够根据输入系统误差参数对不同条件的高速平台云爆子母弹系统进行模拟,能够实现云爆子弹系统的硬件在环的实时仿真测试。该方法解决了高速平台云爆子母弹协同控制性能仿真模拟的问题,并考虑了高速运动与不同决策对云爆子母弹末端毁伤效果的影响,为高速环境下协同控制算法的设计提供了一定的依据。
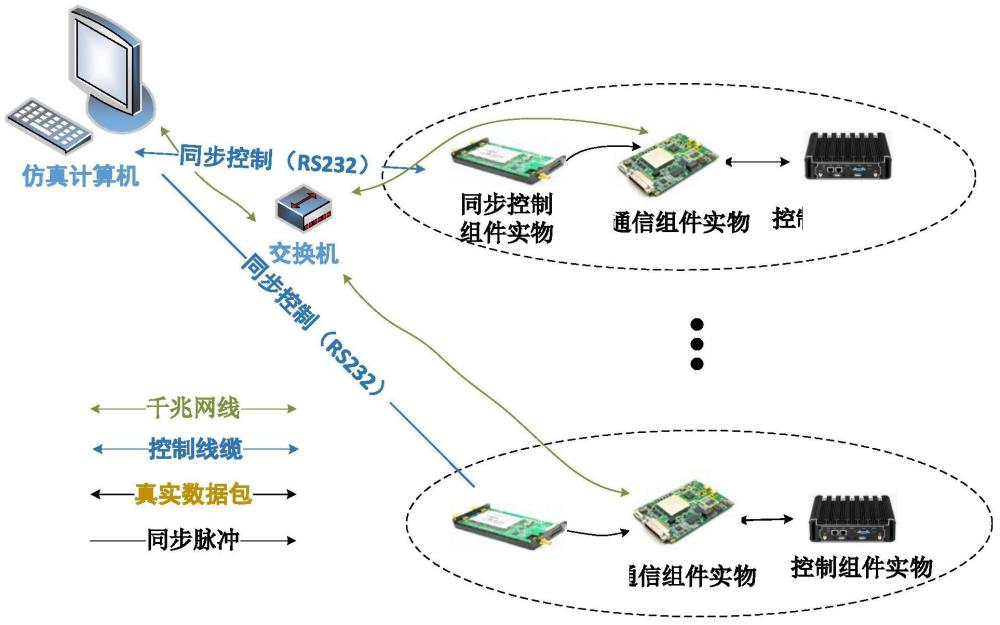
2、为达到上述目的,本发明的技术方案为:一种模拟通信传输过程的高速平台半实物仿真系统,包括云爆子母弹、仿真计算机以及多套实物组件;实物组件的套数与云爆子母弹中子弹的数量一致,均为n,n>3。
3、云爆子母弹中各子弹控制系统的实际连接方式连接多套实物组件。
4、每套实物组件包括通信组件实物、控制组件实物和同步控制组件实物。
5、仿真计算机通过网口与每套实物组件中的通信组网组件进行连接;运行仿真计算机上的仿真系统,将设定的母弹姿态、子弹初始条件、气候条件、系统误差、计算颗粒度t输入至仿真系统。
6、实物组件上电后,通信组件实物完成自身状态并进行组网,并通过与仿真计算机的连接线上报组网完成状况和组网ip,仿真系统根据组网组件上报信息进行可视化显示,显示内容包括通信组件组网状态和通信ip地址。
7、仿真系统收到组网状态完成信息后,通过仿真系统启动全流程自主控制仿真,仿真系统控制同步装置向四套实物组件中的通信组件实物发送同步信号,通信组件实物接收同步信号开始网络通信准备,并将自身组网后形成的网内高同步时钟信号发送给与其连接的控制组件实物完成实物组件内的时钟同步。
8、仿真系统根据初始参数调用弹道仿真软件生成具有n个子弹的弹体姿态、高度及速度的弹道表;根据事先设定的高度测量误差类型以及误差范围对n个子弹的弹道表中每条数据分别按时间生成高度测量误差,并将生成的测量误差与弹道表数据相加产生模拟测量高度信息,将原弹道表数据作为真实数据,按照实际数据产生的周期计算颗粒度周期t输出n个子弹高度信息并根据高度测量误差模拟产生测量高度信息并将产生的高度信息传输给n个实物组件中的通信组件实物,通信组件实物分析收集到的高度信息,将分属于自身序号的子弹数据直接传输给控制组件实物,调用通信信道仿真软件根据初始输入的气候条件及当前的高度模拟其他节点的高度信息能否成功传输,如成功则将不属于自身序号的子弹数据传输给控制组件实物,如不成功则不传输不属于自身序号的子弹数据。
9、控制组件实物的协同控制算法根据收到的各子弹的数据,进行自身实物组件的开伞决策并在达到预定高度后反馈开伞信号和当前时刻给通信组件实物,通信组件实物将开伞信号及开伞信号对应的时刻反馈给仿真系统,仿真系统收到开伞指令后将弹道仿真软件的计算模式由工作模式1转入工作模式2即由子弹下落模式转入子弹伞降模式,并将开伞时刻和高度记录到初始生成的弹道表中。
10、进入工作模式2即子弹伞降模式后弹道仿真软件转入子弹伞降模型,仿真系统根据收到的开伞时刻寻址开伞时刻对应的真实数据弹道表中的高度和速度数据,并将其输入子弹伞降模型计算云爆子弹在开伞后随时间变化的高度和速度生成工作模式2下n个子弹的弹体姿态、高度及速度的弹道表,弹道表的每行数据按照云爆子弹的传感器探测周期t1进行生成并进行累加;仿真系统调用弹道仿真软件生成工作模式2即子弹伞降模式下四个子弹的弹体姿态、高度及速度的弹道表,并继续数据传递过程。
11、控制组件实物中的协同控制算法根据收到的各子弹的数据,进行自身实物组件何时进行云爆剂的抛洒和云爆剂的引燃动作的决策,并在达到预定高度后反馈云爆剂抛撒信号和云爆剂引燃信号给通信组件实物,通信组件实物将云爆剂抛撒信号和云爆剂引燃信号以及两个信号对应的时刻传输给仿真系统,完成上述任务过程后,各套实物组件进入待机模式等待仿真系统指令;
12、仿真系统将收集到的所有数据按照时刻绘制成图标的图表的形式进行可视化的展示并保存此次仿真的数据,并调用云爆剂抛撒模型与毁伤效果评估模型进行本次云爆子母弹打击效果的评估。
13、进一步地,母弹姿态包括母弹俯仰角、母弹偏航角、母弹滚转角、母弹落速。
14、子弹初始条件包括子弹抛撒高度、子弹抛撒角度、子弹抛撒速度和装定开伞高度。
15、气候条件包括风速、降雨率、可见度、能见度、天气状态包括晴朗、降雨、云雾和砂尘三种。
16、系统误差包括高度测量误差和引信起爆控制误差。
17、进一步地,高度测量误差为多次重复产生误差,每次测量高度时由仿真系统根据选定的误差类型及范围产生,如设定高度测量误差的分布满足高斯随机分布,即此高度测量误差x的概率密度函数满足其中μ表示均值,σ表示方差,考虑高度测量的误差一般由传感器的浮动误差造成,设输入的高斯误差为均值μ=a,方差范围为σ=b,则由仿真系统生成随时间变化的随机数种子seedtime,根据随机数种子seedtime生成随机数ui=g(seedtime),其中g(·)表示随机数生成函数,生成个随机变量其中表示向下取整,则可得高斯随机变量为其中gmax表示随机数生成函数的最大值,随着仿真系统的时间变化随机数种子也随之变化,故而每次测量高度时均能生成不同的高斯随机分布误差;如设定高度测量误差的分布满足均匀分布,设输入的均匀误差上限为l1,误差下限l2,则由仿真系统生成随时间变化的随机数种子seedtime,根据随机数种子seedtime生成随机数ui=g(seedtime),其中g(·)表示随机数生成函数,其中表示向下取整,则可得均匀分布随机变量为其中gmax表示随机数生成函数的最大值,随着仿真系统的时间变化随机数种子也随之变化,故而每次测量高度时均能生成不同的均匀分布误差。
18、引信起爆控制误差为一次性产生误差,由引信在特定时刻进行作用时生成,生成过程与高度测量误差生成过程相同,但只生成一次。
19、进一步地,步骤2中的计算颗粒度t根据半实物仿真需求仿真测试周期和云爆子弹的传感器探测周期进行更改。
20、进一步地,弹道表,其每行数据按照云爆子弹的传感器探测周期t1进行生成并进行累加,生成的弹道表为n行4列的表格,其中弹道表的第一列表示时刻,第二列表示子弹的高度,第三列表示子弹的速度,第四列表示子弹的姿态。
21、本发明另外一个实施例还提供了一种模拟通信传输过程的高速平台半实物仿真方法,包括如下步骤:
22、步骤1:按照云爆子母弹中各子弹控制系统的实际连接方式连接多套实物组件,每套实物组件包括通信组件实物、控制组件实物和同步控制组件实物,仿真计算机通过网口与每套实物组件中的通信组网组件进行连接。
23、步骤2:运行仿真计算机上的仿真系统,将设定的母弹姿态、子弹初始条件、气候条件、系统误差、计算颗粒度t输入至仿真系统。
24、步骤3:实物组件上电,通信组件实物完成自身状态并进行组网,并通过与仿真计算机的连接线上报组网完成状况和组网ip,仿真系统根据组网组件上报信息进行可视化显示,显示内容包括通信组件组网状态和通信ip地址。
25、步骤4:在仿真系统收到组网状态完成信息后,通过仿真系统启动全流程自主控制仿真,仿真系统控制同步装置向四套实物组件中的通信组件实物发送同步信号,通信组件实物接收同步信号开始网络通信准备,并将自身组网后形成的网内高同步时钟信号发送给与其连接的控制组件实物完成实物组件内的时钟同步。
26、步骤5:仿真系统根据初始参数调用弹道仿真软件生成具有四个子弹的弹体姿态、高度及速度的弹道表,弹道表的每行数据按照云爆子弹的传感器探测周期t1进行生成并进行累加,生成弹道表;根据测事先设定的高度测量误差类型以及误差范围对四个子弹的弹道表中每条数据分别按时间生成高度测量误差,并将生成的测量误差与弹道表数据相加产生模拟测量高度信息,将原弹道表数据作为真实数据,按照实际数据产生的周期即步骤2中所述的计算颗粒度周期t输出四个子弹高度信息并根据测高误差模拟产生测量高度信息并将产生的高度信息传输四个实物组件中的通信组件,通信组件分析收集到的高度信息,将分属于自身序号的子弹数据直接传输给控制组件实物,调用通信信道仿真软件根据初始输入的气候条件及当前的高度模拟其他节点的高度信息能否成功传输,如成功则将不属于自身序号的子弹数据传输给控制组件实物,如不成功则不传输不属于自身序号的子弹数据。
27、步骤6:控制组件实物的协同控制算法根据收到的各子弹的数据,进行自身实物组件的开伞决策并在达到预定高度后反馈开伞信号和当前时刻给通信组件实物,通信组件实物将开伞信号及开伞信号对应的时刻反馈给仿真系统,仿真系统收到开伞指令后将弹道仿真软件的计算模式由工作模式1转入工作模式2即由子弹下落模式转入子弹伞降模式,并将开伞时刻和高度记录到初始生成的弹道表中。
28、步骤7:进入工作模式2即子弹伞降模式后弹道仿真软件转入子弹伞降模型,仿真系统根据收到的开伞时刻寻址开伞时刻对应的真实数据弹道表中的高度和速度数据,并将其输入子弹伞降模型计算云爆子弹在开伞后随时间变化的高度和速度生成工作模式2下四个子弹的弹体姿态、高度及速度的弹道表,弹道表的每行数据按照云爆子弹的传感器探测周期t1进行生成并进行累加,生成的弹道表为n行4列的表格,其中弹道表的第一列表示时刻,第二列表示子弹的高度,第三列表示子弹的速度,第四列表示子弹的姿态。仿真系统调用弹道仿真软件生成工作模式2即子弹伞降模式下四个子弹的弹体姿态、高度及速度的弹道表,并继续按照步骤5继续数据传递过程。
29、步骤8:控制组件实物中的协同控制算法根据收到的各子弹的数据,进行自身实物组件何时进行云爆剂的抛洒和云爆剂的引燃动作的决策,并在达到预定高度后反馈云爆剂抛撒信号和云爆剂引燃信号给通信组件实物,通信组件实物将云爆剂抛撒信号和云爆剂引燃信号以及两个信号对应的时刻传输给仿真系统,完成上述任务过程后,各套实物组件进入待机模式等待仿真系统指令;
30、步骤9:仿真系统将收集到的所有数据按照时刻绘制成图标的图表的形式进行可视化的展示并保存此次仿真的数据,并调用云爆剂抛撒模型与毁伤效果评估模型进行本次云爆子母弹打击效果的评估。
31、进一步地,母弹姿态包括母弹俯仰角、母弹偏航角、母弹滚转角、母弹落速。
32、子弹初始条件包括子弹抛撒高度、子弹抛撒角度、子弹抛撒速度和装定开伞高度。
33、气候条件包括风速、降雨率、可见度、能见度、天气状态包括晴朗、降雨、云雾和砂尘三种。
34、系统误差包括高度测量误差和引信起爆控制误差。
35、进一步地,高度测量误差为多次重复产生误差,每次测量高度时由仿真系统根据选定的误差类型及范围产生,如设定高度测量误差的分布满足高斯随机分布,即此高度测量误差x的概率密度函数满足其中μ表示均值,σ表示方差,考虑高度测量的误差一般由传感器的浮动误差造成,设输入的高斯误差为均值μ=a,方差范围为σ=b,则由仿真系统生成随时间变化的随机数种子seedtime,根据随机数种子seedtime生成随机数ui=g(seedtime),其中g(·)表示随机数生成函数,生成个随机变量其中表示向下取整,则可得高斯随机变量为其中gmax表示随机数生成函数的最大值,随着仿真系统的时间变化随机数种子也随之变化,故而每次测量高度时均能生成不同的高斯随机分布误差;如设定高度测量误差的分布满足均匀分布,设输入的均匀误差上限为l1,误差下限l2,则由仿真系统生成随时间变化的随机数种子seedtime,根据随机数种子seedtime生成随机数ui=g(seedtime),其中g(·)表示随机数生成函数,其中表示向下取整,则可得均匀分布随机变量为其中gmax表示随机数生成函数的最大值,随着仿真系统的时间变化随机数种子也随之变化,故而每次测量高度时均能生成不同的均匀分布误差。
36、引信起爆控制误差为一次性产生误差,由引信在特定时刻进行作用时生成,生成过程与高度测量误差生成过程相同,但只生成一次。
37、进一步地,步骤2中的计算颗粒度t根据半实物仿真需求仿真测试周期和云爆子弹的传感器探测周期进行更改。
38、进一步地,弹道表,其每行数据按照云爆子弹的传感器探测周期t1进行生成并进行累加,生成的弹道表为n行4列的表格,其中弹道表的第一列表示时刻,第二列表示子弹的高度,第三列表示子弹的速度,第四列表示子弹的姿态。
39、有益效果:
40、本发明提供了一种模拟通信传输过程的高速平台半实物仿真系统及方法,通过对云爆子弹在空间中不同时刻和位置的气象环境的模拟,能够实现对不同气候条件下时变信道通信传输模拟,可以获得更加准确真实的仿真结果,通过将实际场景中的子弹不同阶段的下落过程和通信传输过程进行有效的等效,能够对协同控制算法在不同初始条件下作用的开伞高度、起爆时间、起爆高度等输出结果进行整体作用过程的模拟仿真,在网络化分布式协同控制算法性能的仿真验证领域具有广阔的应用前景。从民用及军事运用领域来看,本发明可以用于研究不同气象环境中分布式协同决策在高速运动平台中性能的变化;也可用于分析控制误差量及系统误差量对协同控制算法的影响。本发明的应用范围的广泛性,决定了其巨大的潜在市场价值。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198218.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。