一种混成系统最优控制生成的方法、装置、介质和设备
- 国知局
- 2024-07-31 23:53:03
本发明涉及实时混成系统最优控制生成,尤其涉及多组件的混成系统的最优控制生成。
背景技术:
1、信息物理系统是指由计算机、网络和物理实体相互集成而成的复杂系统。它将实时计算、通信和控制技术与物理实体(如传感器、执行器、机器人等)相结合,形成一个紧密耦合的系统。从另一个角度观察,这系统内部包含了相互影响的离散行为与连续行为,系统可以在不同的状态上切换,伴随着系统内部一系列连续变量的变化,又称之为混成系统。随着时间推移,混成系统逐渐变得内容更加复杂、规模更加庞大、应用更为广泛,确保信息物理系统的安全和高效运行迫在眉睫。
2、近年来,混成最优控制生成问题已成为信息物理系统领域的一个重要研究课题。这些问题涉及在给定控制目标和目标函数的情况下,寻找系统的最优控制解决方案,这类最优方案旨在使得系统满足安全性约束的前提下,最小化控制目标函数。例如,在工业自动化中,可以通过优化机器人路径规划和动作控制策略来提高生产效率和质量。
3、在混成系统内部,往往存在不止一个实体,通常会由多个实体组合而成,那么能够高效地为组合系统解决最优控制生成问题具有十分重大的意义。然而,大量的组件、组件内部复杂的系统连续行为和离散行为、目标函数等等都给最优控制生成问题带来了很大的挑战性。
4、在过去的二十年中,研究人员提出了各种算法来解决混合最优控制生成问题。其中最典型的方法是基于梯度的优化算法。然而,这类方法要求混成自动机模型的所有行为和目标函数具有莱布尼茨连续可导,这在实际生产生活应用的系统上很难满足,往往会存在许多非连续性的函数特征。目前,解决非线性混成系统的最优控制生成的最先进方法之一是一种基于路径枚举的最优控制生成方法(公开号cn113296394a),该方法通过枚举混成自动机中的所有路径,并将每个路径的最优控制生成问题编码为无导数优化问题,然后使用无导数优化求解器逐一解决这些问题。然而,当系统中潜在路径的数量非常大时,特别是在面对混合组成系统中路径状态空间爆炸问题时,由于该方法需要逐一处理每个路径,整体求最优解的过程非常耗时,导致很难扩展到大型组合系统中去。
技术实现思路
1、本发明所要解决的问题:实时混成系统最优控制生成问题。
2、为解决上述问题,本发明采用的方案如下:
3、根据本发明的一种混成系统最优控制生成的方法,该方法包括接收输入步骤、路径初始化步骤和最优控制求解步骤;
4、所述接收输入步骤具体为:获取混成系统各组件的控制模式流图、系统环境约束信息和控制目标信息;
5、所述控制模式流图是以组件的控制模式为节点,控制模式之间的模式变迁为边的有向图;
6、所述控制模式包括系统量约束信息和系统量之间关系的约束信息;
7、所述模式变迁包括系统量约束信息;
8、所述环境约束信息是全局的系统量约束信息,用以表示混成系统所在环境的约束性条件信息;
9、所述系统量包括状态量和控制量,用以表示混成系统行为特征的参数;
10、所述状态量用以表示组件的状态;
11、所述控制量用以表示组件的外部控制输入;
12、所述控制目标信息包括控制目标表达式和控制目标值;
13、所述路径初始化步骤包括如下步骤:
14、步骤s21:若所述混成系统包括有多个组件,则将各个组件的控制模式流图通过乘积的方式合并成一个整体的控制模式流图;
15、步骤s22:根据控制模式流图中的节点和边的关系和指定的深度,以广度优先的方式对整体的控制模式流图进行遍历,找出控制模式路径,组成控制模式路径集合;
16、步骤s23:根据系统量约束信息,确定各个控制量的取值范围;
17、所述最优控制求解步骤包括如下步骤:
18、步骤s31:从控制模式路径集合中随机选择控制模式路径,并通过在各个控制量的取值范围内随机取值的方式生成各个控制量的采样值生成若干样本;所述样本包括所选择的控制模式路径和各个控制量的采样值;
19、步骤s32:根据各个样本控制量的采样值为各个样本计算评估值;所述评估值根据如下公式计算:
20、若样本控制模式路径中所有约束条件都被满足,则
21、v(k)=abs(g(k)-gm);
22、否则
23、v(k)=p(k);其中,
24、v(k)表示第k个样本的评估值;
25、g(k)表示第k个样本根据控制量的采样值计算的控制目标表达式的值;
26、gm表示控制目标值;
27、abs表示绝对值;
28、p(k)表示第k个样本根据控制量的采样值在样本控制模式路径上的约束条件的不满足度;
29、步骤s33:根据样本评估值的大小将各个样本分成正样本集合和负样本集合;所述正样本集合中样本评估值小于负样本集合,并通过在正样本集合和负样本集合分别随机选择一个正样本和负样本,然后根据随机选择的正样本和负样本的控制量采样值为边界重新确定各个控制量的取值范围;
30、步骤s34:重复步骤s31至s34直到各个样本评估值满足设定的条件或者循环次数达到一定的次数;最后以样本评估值最小的样本的各个控制量的采样值作为最优控制。
31、进一步,根据本发明的混成系统最优控制生成的方法,所述步骤s33中正样本集合和负样本集合采用如下方式划分:根据样本评估值的大小对样本进行升序排序,然后选择其中前n个样本组成正样本集合,剩余样本组成负样本集合。
32、进一步,根据本发明的混成系统最优控制生成的方法,所述步骤s33中所述控制量的取值范围根据如下方式确定:
33、若sc(i)>pc(i),则从sc(i)和pc(i)中随机选择一个值作为第i个控制量取值范围的下边界;
34、若sc(i)<pc(i),则从sc(i)和pc(i)中随机选择一个值作为第i个控制量取值范围的上边界;
35、其中,sc(i)和pc(i)分别表示正样本和负样本第i控制量的采样值。
36、根据本发明的一种混成系统最优控制生成的装置,该装置包括接收输入模块、路径初始化模块和最优控制求解模块;
37、所述接收输入模块用于:获取混成系统各组件的控制模式流图、系统环境约束信息和控制目标信息;
38、所述控制模式流图是以组件的控制模式为节点,控制模式之间的模式变迁为边的有向图;
39、所述控制模式包括系统量约束信息和系统量之间关系的约束信息;
40、所述模式变迁包括系统量约束信息;
41、所述环境约束信息是全局的系统量约束信息,用以表示混成系统所在环境的约束性条件信息;
42、所述系统量包括状态量和控制量,用以表示混成系统行为特征的参数;
43、所述状态量用以表示混成系统的状态;
44、所述控制量用以表示混成系统的外部控制输入;
45、所述控制目标信息包括控制目标表达式和控制目标值;
46、所述路径初始化模块包括如下模块:
47、模块m21,用于:若所述混成系统包括有多个组件,则将各个组件的控制模式流图通过乘积的方式合并成一个整体的控制模式流图;
48、模块m22,用于:根据控制模式流图中的节点和边的关系和指定的深度,以广度优先的方式对整体的控制模式流图进行遍历,找出控制模式路径,组成控制模式路径集合;
49、模块m23,用于:根据系统量约束信息,确定各个控制量的取值范围;
50、所述最优控制求解模块包括如下模块:
51、模块m31,用于:从控制模式路径集合中随机选择控制模式路径,并通过在各个控制量的取值范围内随机取值的方式生成各个控制量的采样值生成若干样本;所述样本包括所选择的控制模式路径和各个控制量的采样值;
52、模块m32,用于:根据各个样本控制量的采样值为各个样本计算评估值;所述评估值根据如下公式计算:
53、若样本控制模式路径中所有约束条件都被满足,则
54、v(k)=abs(g(k)-gm);
55、否则
56、v(k)=p(k);其中,
57、v(k)表示第k个样本的评估值;
58、g(k)表示第k个样本根据控制量的采样值计算的控制目标表达式的值;
59、gm表示控制目标值;
60、abs表示绝对值;
61、p(k)表示第k个样本根据控制量的采样值在样本控制模式路径上的约束条件的不满足度;
62、模块m33,用于:根据样本评估值的大小将各个样本分成正样本集合和负样本集合;所述正样本集合中样本评估值小于负样本集合,并通过在正样本集合和负样本集合分别随机选择一个正样本和负样本,然后根据随机选择的正样本和负样本的控制量采样值为边界重新确定各个控制量的取值范围;
63、模块m34,用于:重复执行模块m31至s34的功能直到各个样本评估值满足设定的条件或者循环次数达到一定的次数;最后以样本评估值最小的样本的各个控制量的采样值作为最优控制。
64、进一步,根据本发明的混成系统最优控制生成的装置,所述模块m33中正样本集合和负样本集合采用如下方式划分:根据样本评估值的大小对样本进行升序排序,然后选择其中前n个样本组成正样本集合,剩余样本组成负样本集合。
65、进一步,根据本发明的混成系统最优控制生成的装置,所述模块m33中所述控制量的取值范围根据如下方式确定:
66、若sc(i)>pc(i),则从sc(i)和pc(i)中随机选择一个值作为第i个控制量取值范围的下边界;
67、若sc(i)<pc(i),则从sc(i)和pc(i)中随机选择一个值作为第i个控制量取值范围的上边界;
68、其中,sc(i)和pc(i)分别表示正样本和负样本第i控制量的采样值。
69、根据本发明的一种介质,该介质内存储有可以被机器读取的程序指令集,当该介质所存储的程序指令集被机器读取后执行时,该机器能够实现上述的混成系统最优控制生成的方法。
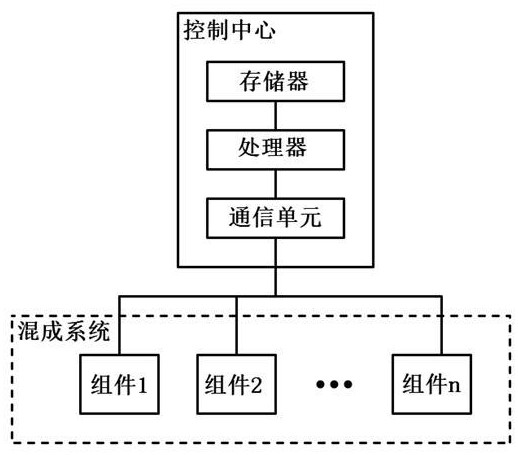
70、根据本发明的一种设备,该设备包括有相连的处理器和存储器;所述存储器内存储有程序指令集;当所述存储器内所存储的程序指令集被处理器读取后执行时,该设备能够实现上述的混成系统最优控制生成的方法。
71、本发明的技术效果如下:
72、本发明为一般的混成系统的最有控制生成问题提供了通用的解决方案。
73、本发明通过在控制量的取值范围内随机采样,然后根据控制量采样在控制模式路径下进行混成系统控制的优劣评估,并计算评估值,然后基于评估值和控制量采样值对控制量的取值范围优化,通过不断的循环迭代,使得控制量的取值范围不断缩限,从而使得随机样本不断优化,最终将最优的随机样本作为混成系统最优控制输出。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198980.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表